基本概念
本主题提供了无人机和使用 PX4 的基本介绍(主要针对新手用户,但对于更有经验的用户来说也是一个很好的介绍)。
如果你已经熟悉了基本概念,你可以继续 Basic Assembly 了解如何连接特定的自动驾驶仪硬件。 要加载固件并使用 QGroundControl 设置车辆,请参阅 Basic Configuration.
无人机是什么?
无人机,又称无人驾驶车辆 (UV),是一种无人驾驶的“机器人”车辆,可以手动或自主控制。 它们可以在空中、地面、水上/水下飞行,并用于许多 consumer, industrial, government and military applications, 包括航空摄影/摄像、载货、竞赛、搜索和勘测等。
无人机的正式名称是无人驾驶飞行器 (UAV)、无人驾驶地面车辆 (UGV)、无人驾驶水面车辆 (USV)、无人驾驶水下车辆 (UUV)。
INFO
无人机系统 (UAS) 一词通常指无人机和完整系统的所有其他组件,包括地面控制站和/或无线电控制器,以及用于控制无人机、捕获和处理数据的任何其他系统。
无人机类型
车辆框架(类型)有很多种,并且类型中又有很多变化。 下面列出了一些类型以及它们最适合的用例。
- Multicopters — 多旋翼飞行器提供精确的悬停和垂直起飞,但飞行距离较短且速度通常较慢。 它们是最受欢迎的飞行器类型,部分原因是它们易于组装,而且 PX4 具有使它们易于飞行且非常适合作为摄像平台的模式。
- Helicopters — 直升机具有与多旋翼飞行器类似的优点,但机械上更复杂且效率更高。 它们的飞行也更加困难。
- Planes (Fixed-wing) — 固定翼飞行器比多旋翼飞行器飞行时间更长、速度更快,因此能够更好地覆盖地面勘测等。 然而,它们比多旋翼飞行器更难飞行和降落,并且如果您需要悬停或飞行非常缓慢(例如,在测量垂直结构时),它们就不适合。
- VTOL (垂直起飞和降落) - 混合固定翼/多旋翼飞行器兼具两全其美的优势:以垂直模式起飞并像多旋翼飞行器一样悬停,但像飞机一样过渡到向前飞行以覆盖更多地面。 垂直起降飞机通常比多旋翼飞机和固定翼飞机更昂贵,并且更难建造和调试。 它们有多种类型:倾转旋翼机、尾坐式旋翼机、四翼机等等。
- Airships/Balloons — 轻于空气的飞行器通常可以在高空长时间飞行,但通常以对飞行速度和方向的控制有限(或完全没有控制)为代价。
- Rovers — 类似汽车的地面车辆。 它们控制简单并且使用起来很有趣。 它们的飞行速度不如大多数飞机快,但可以承载更重的有效载荷,并且静止时不会消耗太多动力。
- Boats — 水上车辆。
- Submersibles — 水下航行器。
有关详细信息,请参阅︰
自动驾驶仪
无人机的“大脑”被称为自动驾驶仪。
它至少由在_飞行控制器_(FC)硬件上的实时操作系统(“RTOS”)上运行的_飞行堆栈_软件组成。 飞行堆栈提供必要的稳定和安全功能,通常还提供一定程度的飞行员辅助,以进行手动飞行和自动执行常见任务,例如起飞、降落和执行预定义任务。
一些自动驾驶仪还包括通用计算系统,可以提供“更高级别”的指挥和控制,并可支持更先进的网络、计算机视觉和其他功能。 这可能作为一项单独的 companion computer, 但在未来它越来越有可能成为一个完全集成的组件。
PX4 自动驾驶仪
PX4 是在 NuttX RTOS 上运行的强大的开源自动驾驶仪_飞行堆栈_。
PX4的一些主要功能包括:
- 支持多种不同的车辆框架/类型,包括: multicopters, fixed-wing aircraft (planes), VTOLs (hybrid multicopter/fixed-wing), ground vehicles, and underwater vehicles.
- 无人机组件的绝佳选择 flight controller, sensors, payloads, and other peripherals.
- 灵活且强大 flight modes and safety features.
- 强大而深度的集成 companion computers and robotics APIs such as ROS 2 and MAVSDK).
PX4 是更广泛的无人机平台的核心部分,其中包括 QGroundControl 地面站, Pixhawk hardware, and MAVSDK 使用 MAVLink 协议与配套计算机、相机和其他硬件集成. PX4 支持 Dronecode Project.
地面控制站
地面控制站 (GCS) 是地面系统,允许 UV 操作员监控和控制无人机及其有效载荷。 已知可与 PX4 配合使用的部分产品如下所列。
QGroundControl
Dronecode GCS 软件被称为 QGroundControl ("QGC"). 它可以在 Windows、Android、MacOS 或 Linux 硬件上运行,并支持多种屏幕外形。 您可以从以下网址免费下载 here.
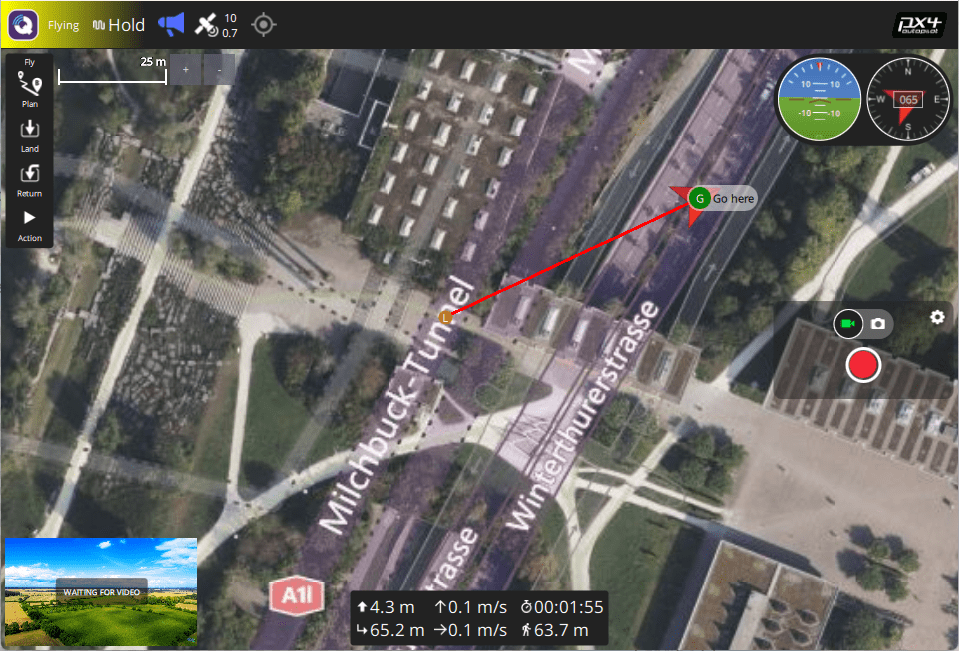
QGroundControl 使用遥测无线电(双向数据链路)与无人机通信,这使您能够获取实时飞行和安全信息,并使用点击界面控制飞行器、摄像机和其他有效载荷。 在支持它们的硬件上,您还可以使用操纵杆控制器手动驾驶飞行器。 QGC 还可用于直观地规划、执行和监控自主任务,设置地理围栏等等。
QGroundControl 桌面版本还用于安装(刷新)PX4 固件并在无人机的自动驾驶仪/飞行控制器硬件上配置 PX4。
Auterion 任务控制 (AMC)
Auterion Mission Control 是一款功能强大且功能齐全的地面控制站应用程序,针对飞行员而非车辆配置进行了优化。 虽然设计用于 Auterion 产品,但也可以与“原始”PX4 一起使用。
有关详细信息,请参阅︰
无人机部件和零件
飞行控制器
飞行控制器 (FC) 是加载并运行 PX4 飞行堆栈固件的硬件。 它们连接到传感器(PX4 通过这些传感器确定其状态)以及用于稳定和移动飞行器的执行器/电机。

PX4 可以在多种不同类型的 Flight Controller Hardware, ranging from Pixhawk Series controllers to Linux computers. These include Pixhawk Standard and manufacturer-supported boards. 您应该选择一个适合您车辆的物理限制、您希望执行的活动和成本的板。
有关更多信息,请参阅: Flight Controller Selection
传感器
PX4使用传感器来确定车辆状态,这是稳定车辆和实现自主控制所必需的。 车辆状态包括:位置/高度、航向、速度、空速、方向(姿态)、不同轴的转速、电池电量等。
PX4 最低要求 a gyroscope, accelerometer, magnetometer (compass) and barometer. 这组最小的传感器被整合到 Pixhawk Series 飞行管制员 (and may also be in other controller platforms).
控制器上可以连接额外的/外部传感器。 建议使用以下传感器:
A GNSS/GPS 或者需要其他全局位置源来启用所有自动模式和一些手动/辅助模式。
通常使用结合GNSS和指南针的模块,因为与飞行控制器中的内部指南针相比,外部指南针对电磁干扰的敏感度更低。
Airspeed sensors 强烈推荐用于固定翼和垂直起降车辆。
Distance Sensors (Rangefinders) 强烈推荐用于所有类型的车辆,因为它们可以实现更平稳、更稳健的着陆,并支持多旋翼地形跟踪等功能。
Optical Flow Sensors 可以与多旋翼机和垂直起降机上的距离传感器一起使用,以支持GNSS拒绝环境中的导航。
有关传感器的更多信息,请参阅: Sensor Hardware & Setup.
输出:电机,舵机,执行器
PX4使用_outputs_来控制:电机速度 (e.g. via ESC), 飞行表面,如副翼和襟翼、相机触发器、降落伞、夹具和许多其他类型的有效载荷。
输出可以是PWM端口或DroneCAN节点 (e.g. DroneCAN motor controllers). 下图显示了PWM输出端口 Pixhawk 4 and Pixhawk 4 mini.
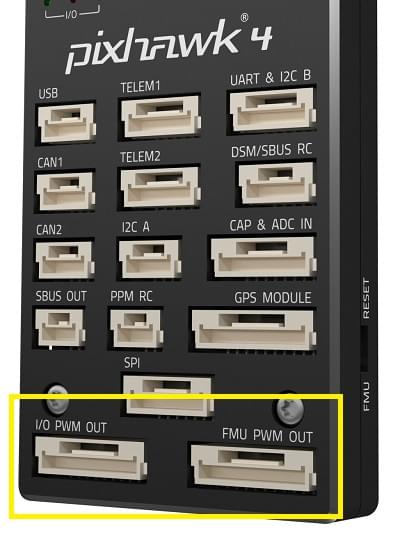

输出分为MAIN和AUX输出,并单独编号 (i.e. MAINn and AUXn, where n is 1 to usually 6 or 8). 它们也可能被标记为 IO PWM Out and FMU PWM OUT (or similar).
WARNING
飞行控制器可能只有MAINPWM 输出(如 Pixhawk 4 Mini),或者在MAIN或AUX上只有 6 个输出。 确保您选择的控制器具有足够的端口/输出,以满足您的 airframe.
您可以将几乎任何输出连接到任何电机或其他执行器,方法是将相关功能(“电机 1”)分配给 QGroundControl 中的所需输出(“AUX1”)。: Actuator Configuration and Testing. 请注意,每个框架的功能(电机和控制面执行器位置)在 Airframe Reference.
Notes:
- Pixhawk 控制器有一个 FMU 板,并且可能有一个单独的 IO 板。 如果有 IO 板,则
AUX端口直接连接到 FMU,而MAIN端口连接到 IO 板。 否则,MAIN端口连接到 FMU,并且没有AUX端口。 - The FMU output ports can use D-shot or One-shot protocols (as well as PWM), which provide much lower-latency behaviour. 这对于竞速机和其他需要更好性能的机体来说是有用的。
- There are only 6-8 outputs in
MAINandAUXbecause most flight controllers only have this many PWM/Dshot/Oneshot outputs. 理论上来说,如果总线支持,可以有更多的输出(比如UAVCAN总线就不限于这几个节点)。
ESCs & Motors
许多 PX4 无人机使用无刷电机,由飞行控制器通过电子速度控制器 (ESC) 驱动 (ESC 将来自飞行控制器的信号转换为传送给电机的适当功率水平)。
有关 PX4 支持的电调和电机的信息,请参阅:
- ESC & Motors
- ESC Calibration
- ESC Firmware and Protocols Overview (oscarliang.com)
电池/电源
PX4无人机最常使用的是锂聚合物(LiPo)电池。 电池通常使用 Power Module 或_电源管理板_,为飞行控制器和 ESC(用于电机)提供单独的电源。
有关电池和电池配置的信息,请参阅 Battery Estimation Tuning 以及指南 Basic Assembly (e.g. Pixhawk 4 Wiring Quick Start > Power).
Manual Control
飞行员可以使用 Radio Control (RC) System or a Joystick/Gamepad controller connected via QGroundControl.


RC 系统使用专用的地面无线电发射器和车载接收器来发送控制信息。 在首次调整/测试新框架设计时,或在进行赛车/杂技飞行时(以及在低延迟很重要的其他情况下),应始终使用它们。
操纵杆系统使用 QGroundControl 将来自“标准”计算机游戏操纵杆的控制信息编码为 MAVLink 消息,并使用(共享)遥测无线电信道将其发送到车辆。 它们可用于大多数手动飞行用例,例如起飞、勘测等,前提是您的遥测信道具有足够高的带宽/低延迟。
操纵杆通常用于集成 GCS/手动控制系统,因为集成操纵杆比单独的无线电系统更便宜、更容易,并且对于大多数用例来说,较低的延迟并不重要。 一些遥控系统还可以额外接收自动驾驶仪传回的数传信息。
INFO
PX4 不需要自主飞行模式的手动控制系统。
安全开关
车辆可能配备有_安全开关_,必须先启动该开关,车辆才能 armed (when armed, motors are powered and propellers can turn).
此开关几乎总是集成在 GPS module that is connected to the Pixhawk GPS1 port — along with the buzzer and UI LED.
该开关可能默认禁用,但这取决于特定的飞行控制器和机身配置。 您可以使用 CBRK_IO_SAFETY 参数.
INFO
安全开关是可选的。 许多人认为,对于用户来说,永远不要接近供电系统,甚至不要启用/禁用此联锁,这样更安全。
蜂鸣器
车辆通常配备蜂鸣器,用于提供车辆状态和飞行准备情况的声音通知 (see Tune meanings).
该蜂鸣器几乎总是集成在 GPS 连接到 Pixhawk 的模块 GPS1 port — along with the safety switch and UI LED. 您可以使用参数禁用通知音乐 CBRK_BUZZER.
LEDs
车辆应具有超亮 UI RGB LED 这表明当前已做好飞行准备。
历史上,这包含在飞行控制器板中。 在较新的飞行控制器上,这几乎总是 I2C peripheral integrated into the GPS 连接到 Pixhawk GPS1 端口的模块——以及 safety switch and buzzer.
数传电台
Data/Telemetry Radios 可以在像_QGroundControl_这样的地面控制站和运行 PX4 的车辆之间提供无线 MAVLink 连接。 这使得在飞行过程中调整参数,实时监视遥测信息,更改任务等成为可能。
机载计算机
A Companion Computer (也称为“任务计算机”或“机外计算机”), 是一台独立的车载计算机,可与 PX4 通信以提供更高级别的指挥和控制。
配套计算机通常运行 Linux,因为这是一个更好的“通用”软件开发平台,并允许无人机利用预先存在的软件进行计算机视觉、网络等。
飞行控制器和配套计算机可以预先集成到单个基板中,从而简化硬件开发,也可以分开,并通过串行电缆、以太网电缆或 wifi 连接。 配套计算机通常使用高级机器人 API 与 PX4 通信,例如 MAVSDK or ROS 2.
相关主题包括:
- Companion Computers
- Off-board Mode - 通过 GCS 或配套计算机对 PX4 进行机外控制的飞行模式。
- Robotics APIs
SD卡(可移除储存器)
PX4 使用 SD 存储卡来存储 flight logs, 它们也是使用 UAVCAN 外围设备和飞行所必需的 missions.
默认情况下,如果没有SD卡,PX4将播放 format failed (2-beep) 在启动过程中调整两次(上述功能均不可用)。
TIP
Pixhawk板上支持的最大SD卡大小为32GB。 _SanDisk Extreme U3 32GB_和_Samsung EVO Plus 32_是 highly recommended.
尽管如此,SD卡也只是可选的。 不包含 SD 卡槽的飞行控制器可以:
- 使用参数禁用通知蜂鸣声 CBRK_BUZZER.
- Stream logs 到另一个组件(伴侣)。
- 将任务存储在RAM/FLASH中。
Payloads
有效载荷是车辆为满足用户或任务目标而携带的设备,如测量任务中的摄像头、用于检查的仪器,如辐射探测器,以及需要交付的货物。 PX4支持许多摄像头和各种有效载荷。
有效载荷连接到 Flight Controller outputs, 并且可以在任务中自动触发,也可以从RC控制器或操纵杆或地面站(通过MAVLink/MAVSDK命令)手动触发。
有关更多信息,请参阅: Payloads & Cameras
解锁和加锁
当所有电机和执行器都通电时,飞行器即为_武装_状态,当没有通电时,飞行器即为_解除武装_状态。 当只有伺服执行器通电时,飞行器也处于_预武装_状态,主要用于测试。
飞行器通常在地面解除武装,在当前飞行模式下起飞前必须武装。
WARNING
武装车辆非常危险,因为螺旋桨可以在无需用户进一步输入的情况下随时开始旋转,并且在许多情况下会立即开始旋转。
默认情况下,使用 RC 摇杆手势可以触发布防和撤防。 在模式 2 发射器上,您可以通过按住右下方的 RC 油门/偏航摇杆一秒钟来布防,而要撤防,请按住左下方的摇杆一秒钟。 还可以使用遥控上的按钮来配置 PX4 解锁(也可以从地面站发送MAVLink解锁命令)。
为了减少事故发生,车辆在地面时应尽可能少地配备武器。 默认情况下,车辆具有以下功能:
- 不使用时处于_解除武装_或_预武装_状态(电机无动力),起飞前必须明确_武装_。
- 如果车辆在武装后没有足够快地起飞,则自动解除武装/预武装(解除武装时间可配置)。
- 着陆后不久自动解除武装/预武装(时间可配置)。
- 载具如果不是在“健康”状态,则会解锁不通过。
- 如果车辆有 safety switch that has not been engaged.
- 如果垂直起降飞行器处于固定翼模式,则无法启动 (by default).
- 由于其他一些可选因素,布防可能会被阻止 arming pre-condition settings, 例如电池电量低。
预武装时您仍然可以使用执行器,而解除武装会使所有设备断电。 预武装和解除武装都应该是安全的,并且特定车辆可以支持其中一种或两种。
TIP
有时车辆无法启动,原因并不明显。 QGC v4.2.0(撰写本文时为每日构建)及更高版本提供启动检查报告 Fly View > Arming and Preflight Checks. 从 PX4 v1.14 开始,它提供了有关武装问题以及可能的解决方案的全面信息。
布防和撤防配置的详细概述可以在这里找到: Prearm, Arm, Disarm Configuration.
飞行模式
飞行模式为用户(飞行员)提供不同类型/级别的车辆自动化和自动驾驶辅助。 _自主模式_完全由自动驾驶仪控制,不需要飞行员/遥控器输入。 例如,这些模式用于自动执行常见任务,如起飞、返回原点位置和着陆。 其他自主模式执行预编程任务,跟随 GPS 信标,或接受来自机外计算机或地面站的命令。
_手动模式_由用户(通过 RC 控制杆/操纵杆)在自动驾驶仪的帮助下进行控制。 不同的手动模式可实现不同的飞行特性 - 例如,某些模式可实现特技表演, 而其他模式则无法翻转,并将在逆风情况下保持位置/航向。
TIP
并非所有飞行模式都适用于所有车辆类型,并且某些模式仅在满足特定条件时才能使用(例如,许多模式需要全球位置估计)。
以下是每种飞行器可用的飞行模式概述:
- Flight Modes (Multicopter)
- Flight Modes (Fixed-Wing)
- Flight Modes (VTOL)
- Drive Modes (Differential Rover)
- Drive Modes (Ackermann Rover)
有关如何设置遥控器开关以启用不同飞行模式的说明,请参阅 Flight Mode Configuration.
安全设置(故障保护)
PX4 具有可配置的故障安全系统,可在出现问题时保护和恢复您的车辆! 这些系统允许您指定可以安全飞行的区域和条件,以及触发故障安全时将执行的操作(例如,着陆、保持位置或返回指定点)。
INFO
您只能为第一个故障安全事件指定操作。 一旦发生故障安全,系统将输入特殊处理代码,以便后续的故障安全触发器由单独的系统级别和车辆特定代码管理。
主要故障安全区域如下所列:
- 电池电量低
- 遥控 (RC) 丢失
- 位置丢失(全球位置估计质量太低)。
- 机外丢失(例如,与配套计算机失去连接)
- 数据链路丢失(例如,与 GCS 失去遥测连接)。
- 地理围栏突破(限制飞行器在虚拟圆柱体内飞行)。
- 任务故障保护(防止在新的起飞位置运行先前的任务)。
- 交通规避(由来自 ADSB 转发器的转发器数据触发)。
有关详细信息,请参阅: Safety (Basic Configuration).
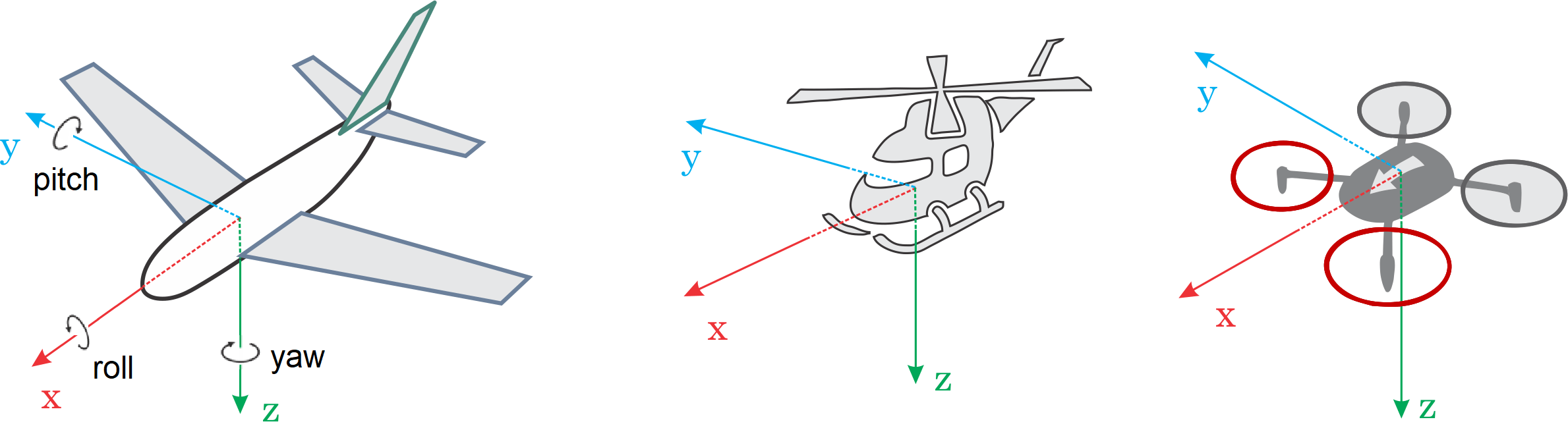
航向和运动方向
所有车辆、船舶和飞机都有一个基于其前进运动的前进方向或方位。
INFO
对于 VTOL Tailsitter,航向与多旋翼配置有关(即起飞、悬停、着陆时的车辆姿势)。
了解车辆的航向很重要,这样才能将自动驾驶仪与车辆的运动方向对齐。 即使多旋翼飞行器从各个方向对称,它们也有航向! 通常制造商使用彩色螺旋桨或彩色机臂来指示航向。
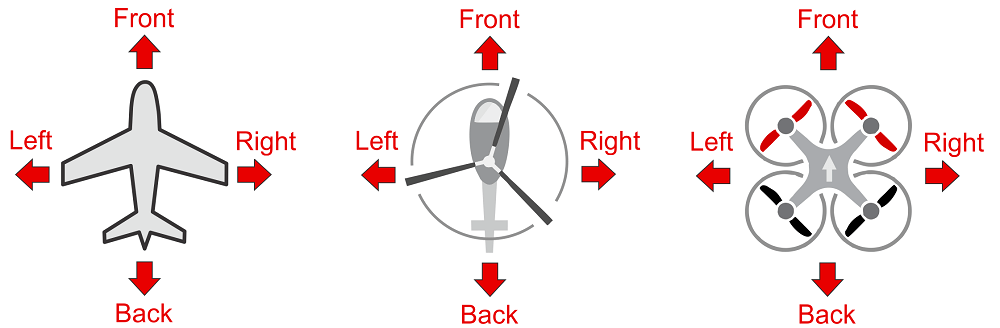
在我们的插图中,我们将使用红色表示多旋翼飞行器的前螺旋桨以显示航向。
您可以深入阅读有关 Flight Controller Orientation