稳定模式(固定翼飞机)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "需手动/遥控操作")
“稳定模式” 是一种手动飞行模式,将操纵杆回中可使飞行器姿态(横滚和俯仰)保持水平,并维持水平姿态。
INFO
“稳定模式” 与 高度模式 类似,释放操纵杆可使飞行器保持水平,但与高度模式不同的是,它不维持高度或航向。它比 手动模式 更容易飞行,因为飞行器不会发生横滚或翻转,并且在需要时,通过将操纵杆回中很容易使飞行器保持水平。
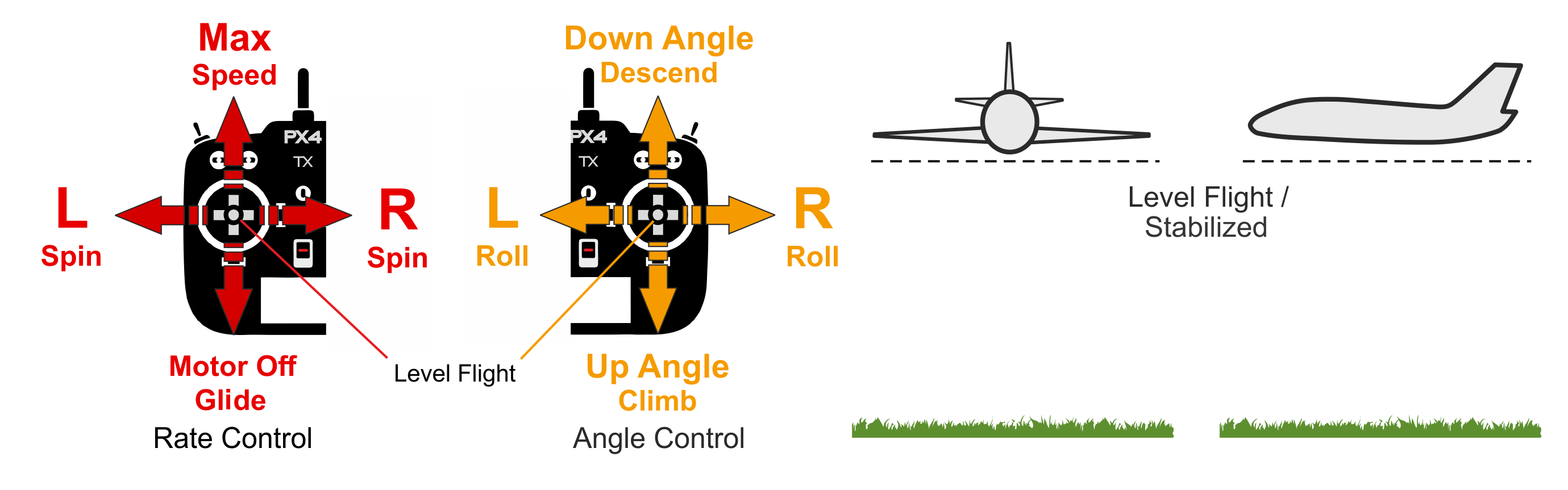
飞行器根据俯仰和油门输入进行爬升/下降,若横滚操纵杆不为零,则执行 协调转弯。横滚和俯仰采用角度控制(无法进行上下翻滚或环形飞行)。
如果油门降至0%(电机停止),飞机将进入滑行状态。为完成转弯操作,在整个操作过程中必须保持相应指令,因为一旦释放横滚摇杆,飞机将停止转弯并自动恢复水平(俯仰和偏航指令同理)。
偏航操纵杆可用于在转弯时增加/降低飞行器的偏航速率。若偏航操纵杆保持在中间位置,控制器会自动进行转弯协调,即根据当前横滚角度应用必要的偏航速率以实现平稳转弯。
下图直观展示了该模式的运行情况(适用于 2型遥控器)。
技术描述
在该手动模式下,回中的横滚/俯仰操纵杆可使飞行器姿态保持水平。飞行器的航向和高度不会自动维持,可能会因风而发生漂移。
- 回中操纵杆(在死区内):横滚/俯仰/偏航操纵杆回中时,飞行器进入直线水平飞行状态。但飞行器的航向和高度不会自动维持,可能会因风而漂移。
- 横滚操纵杆:控制横滚角度,自动驾驶仪将维持 协调飞行。
- 俯仰操纵杆:围绕已定义的偏移量 FW_PSP_OFF 控制俯仰角。
- 油门操纵杆:直接控制油门。
- 偏航操纵杆:操纵会驱动方向舵(指令将被加到自动驾驶仪计算的指令中以维持 协调飞行),这与 稳定模式 的原理一致。
- 操作要求:需要手动控制输入(如遥控、操纵杆等)。
参数
该模式受以下参数影响:
| 参数 | 描述 |
|---|---|
| FW_MAN_P_MAX | 姿态稳定模式下手动控制的最大俯仰角。默认值:45度。 |
| FW_MAN_R_MAX | 姿态稳定模式下手动控制的最大横滚角。默认值:45度。 |
| FW_MAN_YR_MAX | 手动增加的最大偏航速率。默认值:每秒30度。 |
| FW_PSP_OFF | 俯仰设定点偏移量(水平飞行时的俯仰角)。默认值:0度。 |