环绕模式 (多旋翼)

")
Orbit 引导飞行模式允许您控制多旋翼飞行器 (或多旋翼模式下的垂直起降)在特定位置绕圈飞行,方法是 default 偏航,以便它始终面向中心。
INFO
- 模式是自动的——无需用户干预即可控制车辆。
- 模式至少需要一个有效的局部位置估计(不需要全局位置)。
- 如果没有有效的本地位置,飞行器就无法切换到此模式。
- 如果飞行器失去位置估计,就会发生故障安全保护。
- 模式阻止布防(切换到此模式时车辆必须布防)。
- 模式要求风和飞行时间在允许的范围内(通过参数指定)。
- 此模式目前仅支持多旋翼飞行器(或 MC 模式下的 VTOL)。
- 遥控摇杆运动可以控制上升/下降和轨道速度和方向。
- 该模式可以通过以下方式触发: MAV_CMD_DO_ORBIT MAVLink 命令。
综述

QGroundControl(或其他兼容的 GCS 或 MAVLink API)是启用该模式以及设置轨道的中心位置、初始半径和高度所必需的。 一旦启用,飞行器将尽可能快地飞到指令圆轨迹上的最近点,并在计划的圆上以缓慢(1 米/秒)的速度顺时针绕轨道飞行,面向中心。
关于如何开始轨道运行的说明可以在这里找到: FlyView > Orbit Location (QGroundControl guide).
INFO
The use of an RC control is optional. If no RC control is present the orbit will proceed as described above. 无法使用遥控来启动该模式(如果使用遥控切换该模式,无人机会处于空闲状态)。
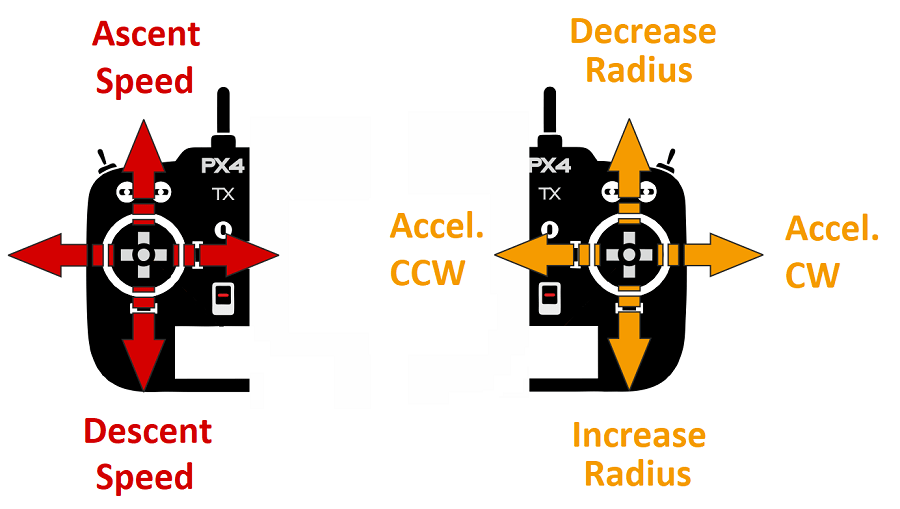
遥控可以用于改变绕圈的高度,半径,速度和绕圈方向:
- Left stick:
- _上/下:_控制上升/下降速度,如 Position mode. 处于中心死区时,高度被锁定。
- _左/右:_无效果。
- Right stick:
- _左/右:_控制顺时针/逆时针方向的轨道加速度。居中时,当前速度被锁定。
- 最大速度为 10 m/s,进一步的限制是将向心加速度保持在 2 m/s^2 以下。
- _上/下:_控制轨道半径(较小/较大)。当居中时,当前半径被锁定。
- 最小半径是 1 米。 最大半径是 100 米。
- _左/右:_控制顺时针/逆时针方向的轨道加速度。居中时,当前速度被锁定。
下图直观地展示了模式行为 (for a mode 2 transmitter).
切换到其他飞行模式(使用遥控或 QGC 地面站)可以停止此模式。
参数/限制
该模式受以下参数影响:
| 参数 | 描述 |
|---|---|
| MC_ORBIT_RAD_MAX | 轨道的最大半径。默认值:1000 米。 |
| MC_ORBIT_YAW_MOD | 轨道飞行期间的偏航行为。默认:前部到圆心. |
下面的限制是写死的:
- 初始/默认是顺时针方向 1 m/s 旋转。
- 最大加速度限制在 2 2 m/s^2,优先保持控制的圆周轨迹而不是地速(即, 如果加速度超过 2 m/s^2,无人机将减速以达到正确的圆周)。
MAVLink 消息 (开发者)
环绕模式使用以下 MAVLink 命令:
- MAV_CMD_DO_ORBIT - 以指定的中心点、半径、方向、高度、速度开始轨道运行 yaw direction (车辆默认面向轨道中心).
- ORBIT_EXECUTION_STATUS - 在轨道运行期间发射轨道状态,以更新当前轨道参数的 GCS(这些参数可能会被 RC 控制器更改)。