跟随模式 (Multicopter)
")
_跟随Me_模式允许多旋翼飞机自主保持相对于另一个系统的位置和高度,该系统使用FOLLOW_TARGET MAVLink消息。
INFO
- 模式为自动 - 无需用户干预即可控制车辆。
- 模式至少需要有效的本地位置估计(不需要全局位置)。
- 如果没有有效的本地位置,飞行器无法切换到此模式。
- 如果飞行器丢失位置估计,它们将失效安全。
- 模式阻止武装(切换到此模式时必须武装车辆)。
- 模式要求风和飞行时间在允许的范围内(通过参数指定)。
- 此模式目前仅在多旋翼飞行器(或 MC 模式下的 VTOL)上受支持。
- 跟随目标还必须能够提供位置信息。
- QGroundControl 在带有 GPS 模块的 Android 设备上支持跟随我模式,并且 MAVSDK.
综述
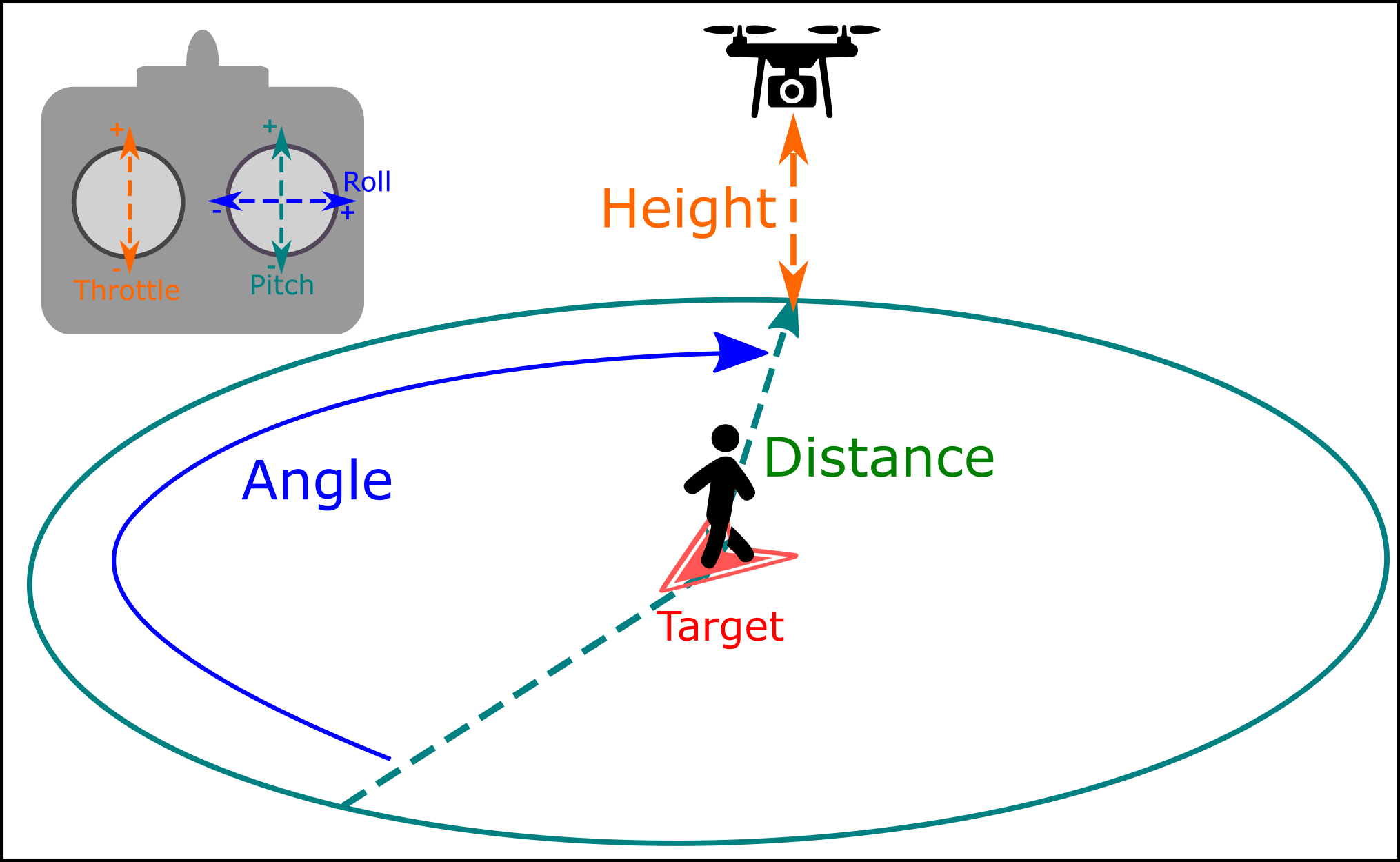
车辆将自动偏航以面对并跟随目标从指定的 relative angle, distance and height 和海拔,取决于 altitude control mode.
默认情况下,它将从目标正后方 8 米处跟随,高度为起始(布防)位置上方 8 米。
用户可以使用 RC 控制器调整跟随角度、高度和距离,如上所示:
_跟随高度_由
up-downinput ("Throttle"). 将操纵杆置于中央,以恒定高度跟随目标。升高或降低操纵杆可调整高度。_跟随距离_由
forward-backinput ("Pitch"). 向前推操纵杆会增加跟随距离,向后拉操纵杆则会减少跟随距离。_跟随角度_由
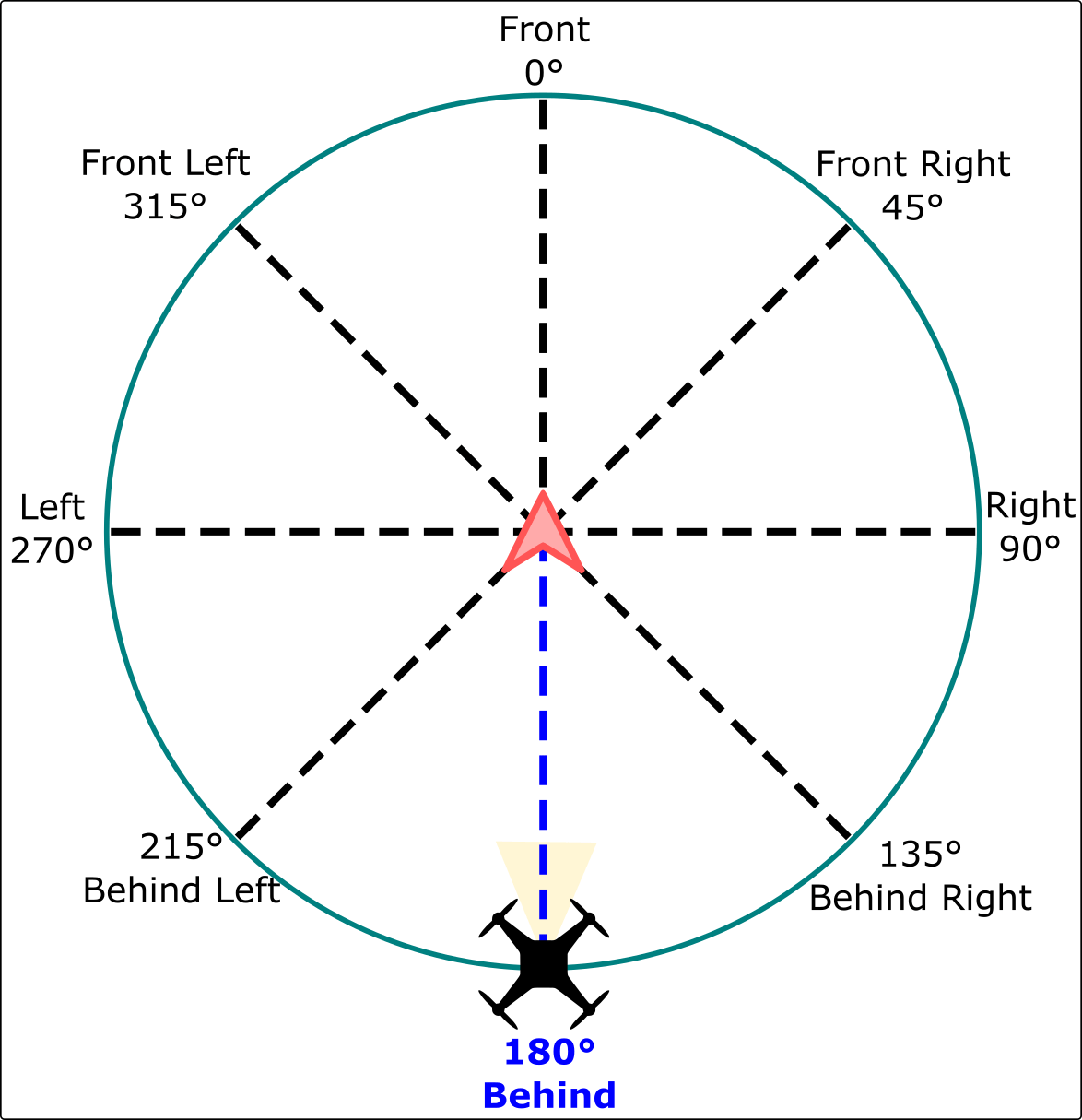
left-rightinput ("Roll"). 移动是从用户的角度进行的,因此如果您面向无人机并将操纵杆向左移动,无人机就会向左移动。 从上方看,如果您将操纵杆向左移动,无人机就会逆时针移动。跟随角定义为相对于目标航向(0 度)顺时针方向增加
INFO
退出跟随模式时,使用 RC 控制器设置的角度、高度和距离值将被丢弃。 如果您退出跟随模式并再次激活它,这些值将重置为默认值。
视频
Safety Precautions
WARNING
跟随我模式 不实施任何类型的避障。 使用此模式时必须特别小心。
应遵守下列飞行预防措施:
- 跟随我模式仅应在没有树木、电线、房屋等遮挡的开阔区域使用。
- Set the follow-me height 远高于周围任何障碍物的值。 默认情况下,该位置高于主(布防)位置 8 米。
- 在启用跟随模式之前手动飞到安全高度比着陆时启用跟随模式更安全(即使该模式实现了自动起飞)。
- 给您的车辆足够的停车空间,特别是在快速行驶时。
- 如果出现问题,请准备好切换回位置模式,特别是第一次使用跟随模式时。
- 您无法通过 RC 摇杆移动关闭跟随模式(因为这会调整属性)。 您无法通过 RC 摇杆移动关闭跟随模式(因为这会调整属性)。您需要有一个可以发送飞行模式切换信号的 GroundStation 或在您的 RC 发射器中配置飞行模式切换。
使用 QGroundControl 跟随我

使用 QGroundControl 作为具有 GPS 模块的地面站硬件上的目标,支持 跟随我 模式。 推荐的配置是具有两个遥测无线电的 USB OTG 功能的 Android 设备。
要设置_跟随我_模式:
- 将遥测无线电连接到地面站设备,将另一个遥测无线电连接到车辆(这允许定位信息在两个无线电之间传递)。
- 禁用 Android 设备上的睡眠模式:
- 此设置通常位于:设置 > 显示。
- 请务必将您的 Android 设备设置为不进入睡眠状态,因为这可能会导致 GPS 信号定期停止发射。
- 起飞高度至少为 2-3 米(即使支持自动起飞也建议这样做)。
- 将车辆停在地面上,按下安全开关并后退至少 10 米。
- 启动车辆并起飞。
- 切换到跟随我模式。
- 直升机将首先上升到距地面或家 1 米的最低安全高度,具体取决于距离传感器的存在。
- 它将上升到 跟随高度 内的 3 米,以避免在水平移动之前发生潜在的碰撞。
- 直升机将始终调整其航向以面向目标
此时,您可以开始移动,无人机将跟随您。
该模式已在以下 Android 设备上进行了测试:
- Galaxy S10
- Nexus 7 Tablet
Follow-me with MAVSDK
MAVSDK 支持 Follow Me, 允许您创建一个跟随我目标的无人机应用程序。
更多信息请参阅 Follow Me class 文档以及 Follow Me Example.
配置
高度控制模式

高度控制模式确定车辆高度是相对于原始位置、地形高度还是跟随目标报告的高度。
2D tracking(the default altitude mode) 使无人机以相对于固定起始位置(起飞高度)的高度跟随。 无人机与目标之间的相对距离将随着您上升和下降而变化(在丘陵地形中请小心使用)。2D + Terrain利用距离传感器的信息,使无人机相对于其下方的地形以固定高度跟随。- 如果车辆没有距离传感器,则跟踪将与“2D 跟踪”相同。
- 距离传感器并不总是准确的,车辆在此模式下飞行时可能会“跳跃”。
- 请注意,该高度是相对于车辆下方的地面,而不是跟踪目标。 请注意,该高度是相对于车辆下方的地面,而不是跟踪目标。无人机可能不会跟随目标的高度变化!
3D tracking模式使无人机按照其 GPS 传感器提供的相对于跟随目标的高度进行跟随。 这可以适应目标高度的变化,例如当您爬山时。
WARNING
请勿设置 Altitude mode (FLW_TGT_ALT_M) to 3D Tracking 使用 QGC for Android 时(或者更一般地,没有检查 FOLLOW_TARGET.altitude 是 AMSL 值).
The MAVLink FOLLOW_TARGET 消息定义需要相对于平均海平面 (AMSL) 的高度,而 Android 上的 QGC 发送的是相对于 GPS 椭球的高度。 这可能相差多达 200 米!
由于内置的最低安全高度限制(1 米),无人机可能不会坠毁,但可能会飞得比预期高得多。 如果无人机的高度与规定值有明显差异,则假设地面站的高度输出有误并使用 2D 跟踪。
参数
可以使用以下参数配置跟随我行为:
| 参数 | 描述 |
|---|---|
| FLW_TGT_HT | Vehicle follow-me height, in metres. Note that this height is fixed relative to the home/arming position (not the target vehicle). Default and minimum height is 8 meters (about 26 ft) |
| FLW_TGT_DST | Vehicle/ground station separation in the horizontal (x,y) plane, in metres. Minimum allowed separation is 1 meter. Default distance is 8 meters (about 26 ft). |
| FLW_TGT_FA | Follow angle relative to the target's heading, in degrees. If a value out of the range [-180.0, +180.0] is entered, it will get automatically wrapped and applied (e.g. 480.0 will be converted to 120.0) |
| FLW_TGT_ALT_M | Altitude control mode. - 0 = 2D Tracking (Altitude Fixed) - 1 = 2D Tracking + Terrain Following - 2 = 3D Tracking of the target's GPS altitude WARNING: DO NOT USE WITH QGC for Android. |
| FLW_TGT_MAX_VEL | Maximum relative velocity for orbital motion around the target, in m/s. - 10 m/s has proven to be a sweet spot for aggressiveness vs smoothness. - Setting it to higher value means the orbit trajectory around the target will move faster, but if the drone is physically not capable of achieving that speed, it leads to an aggressive behavior. |
| FLW_TGT_RS | Dynamic filtering algorithm responsiveness that filters incoming target location. - 0.0 = Very sensitive to movements and noisy estimates of position, velocity and acceleration.- 1.0 = Very stable but not responsive filter |
提示和技巧
Set the follow distance 到 12 米以上(8 米为“建议最小值”)。
目标与无人机的 GPS 传感器之间存在固有的位置偏差(3 至 5 米),这会导致无人机跟随实际目标附近的某个“幽灵目标”。当跟随距离非常小时,这种情况会更加明显。我们建议将跟随距离设置得足够大,以使 GPS 偏差不明显。 当跟随距离非常小时,这种情况会更加明显。 我们建议将跟随距离设置得足够大,以使 GPS 偏差不明显。
改变跟随角度的速度取决于 maximum tangential velocity setting.
实验表明
5 m/sare10 m/s通常是合适的。使用 RC 调整高度、距离和角度,您可以获得一些有创意的相机镜头。
该视频演示了 Google 地球视角,通过将高度调整到大约 50 米(高),距离调整到 1 米(近)。这允许从卫星拍摄的视角。
已知的问题
- The SiK 915 Mhz telemetry radio 众所周知,它会干扰某些 Android 设备接收的 GPS 信号。 保持数传和安卓设备之间尽可能远的距离,避免使用跟随模式时受到干扰。
- Android 版 QGC 报告的高度不正确(高于椭球面的高度,而不是 AMSL)。跟随高度最多可偏离 200 米! 跟随高度最多可偏离 200 米!