Pixhack v3飞行控制器
WARNING
PX4不生产此(或任何)自动驾驶仪。若需硬件支持或解决合规性问题,请联系制造商。
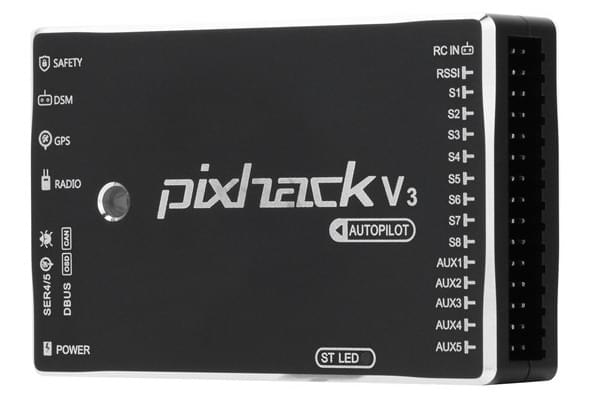
CUAV的_Pixhack V3_飞行控制板是一款灵活的自动驾驶仪,主要面向商业系统制造商。
该板是SOLO Pixhawk® 2(PH2)飞行控制器的变体,而SOLO Pixhawk 2又是基于Pixhawk项目的FMUv3开源硬件设计。它在努特克斯(NuttX)操作系统上运行PX4,并且与PX4或ArduPilot®(APM)固件完全兼容。
_Pixhack V3_相对于原始设计有显著改进,包括更好的接口布局,还增加了减震和恒温系统。
INFO
此飞行控制器属于制造商支持类型。
总览
微处理器
- STM32F427
- STM32F100(故障保护协处理器)
传感器
- 加速度计(3个):LSM303D、MPU6000、MPU6000
- 陀螺仪(3个):L3GD20、MPU6000、MPU9250
- 指南针(2个):LS303D、MPU9250
- 气压计(2个):MS5611*2
接口
- MAVLink UART(2个)
- GPS UART(2个)
- DEBUG UART(1个)
- 遥控信号输入(支持PPM、SBUS、DSM/DSM2)
- RSSI输入:PWM或3.3ADC
- I2C总线(2条)
- CAN总线(1条)
- ADC输入:3.3V×1、6.6V×1
- PWM输出:8个PWM IO + 4个IO
电源系统
- Power口输入电压:4.5 - 5.5 V
- USB口输入电压:5.0 V ± 0.25v
重量和尺寸
- 重量:63克
- 宽度:68毫米
- 厚度:17毫米
- 长度:44毫米
其它特性
- 工作温度: -20 - 60°C
购买链接
该控制板可从以下渠道购买:
编译固件
TIP
大多数用户无需构建此固件!当连接适配硬件时,它已预先构建并由 QGroundControl 自动安装。
要为该目标构建PX4,请执行以下命令:
make px4_fmu-v3_default引脚和原理图
串口映射
| UART | 设备 | 端口 |
|---|---|---|
| UART1 | /dev/ttyS0 | IO调试端口 |
| USART2 | /dev/ttyS1 | TELEM1(带流控制) |
| USART3 | /dev/ttyS2 | TELEM2(带流控制) |
| UART4 | ||
| UART7 | 控制台 | |
| UART8 | 串口4 |