全向飞行器
全向飞行器是一种多旋翼飞行器,能够在所有方向(6个自由度)提供推力。这使得它无需倾斜机身就能向任意方向移动,并且可以以任意倾斜角度悬停。所有这些特性通过特定的电机布局和推力轴排列方式来实现:
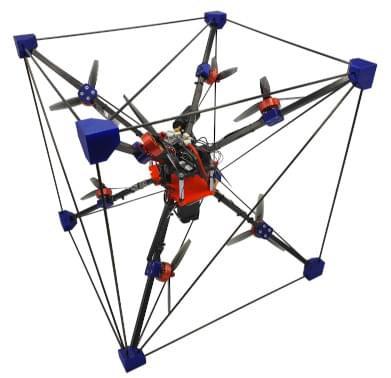
本次组装遵循Brescianini, Dario, 和 Raffaello D'Andrea的原始设计。
物料清单
本次组装所需的组件如下:
电子设备
- 飞行控制器:Holybro KakuteH7
- 搭配2个Tekko32 F4 4合1电调
INFO
你也可以选择其他飞行控制器,只要它支持8个DShot输出即可。
:::
- GPS:[ZED - F9P](https://www.gnss.store/gnss - gps - modules/105 - ublox - zed - f9p - rtk - gnss - receiver - board - with - sma - base - or - rover.html?search_query=ZED - F9P&results=11)
- [GPS螺旋天线](https://www.gnss.store/rf - gps - antennas/28 - high - performance - multi - band - gnss - active - quad - helix - antenna - for - rtk.html)
INFO
其他GPS也可能适用,不过螺旋天线在倒飞时预计性能更好。
:::
- 任意遥控接收器
- 外部磁罗盘。我们使用的是[RM - 3100](https://store - drotek.com/893 - professional - grade - magnetometer - rm3100.html)。
- 遥测链路,例如WiFi
推进系统
- 电机:8个[BrotherHobby LPD 2306.5 2000KV/2450KV/2650KV](https://www.getfpv.com/brotherhobby - lpd - 2306 - 5 - 2000kv - 2450kv - 2650kv - motor.html)
- 3D螺旋桨:2套[HQProp 3D 5X3.5X3三叶片螺旋桨(4个装)](https://www.getfpv.com/hqprop - 3d - 5x3 - 5x3 - 3 - blade - propeller - set - of - 4.html) 或2套[Gemfan 513D三叶片3D螺旋桨(4个装)](https://www.getfpv.com/gemfan - 513d - durable - 3 - blade - propeller - set - of - 4.html)
- 电池:我们使用的是6S 3300mAh锂聚合物电池。务必检查尺寸,确保其适配机架。
- 电池绑带
机架
- 8mm×7mm×1000mm的方形碳纤维管,例如可在[此处](https://shop.swiss - composite.ch/pi/Halbfabrikate/Rohre/Vierkant - Rohre/CFK - Vierkantrohr - 8x8 - 7x7mm.html)购买
- 3mm×2mm×1000mm的碳纤维棒,例如可在[此处](https://shop.swiss - composite.ch/pi/Halbfabrikate/Rohre/CFK - Rohre - pultrudiert - pullwinding/Carbon - Microtubes - 100cm - x - 20 - 3mm.html)购买
- 所需长度:
- 方形管:8根,每根长度248mm
- 碳棒:12根328mm长,6根465mm长
- 螺丝:
- 电机与支撑柱:40个M3×12mm螺丝
- 飞控安装:4个M3×35mm螺丝,4个M3螺母
- 支撑柱:4个40mm长支撑柱
- 3D模型

组装
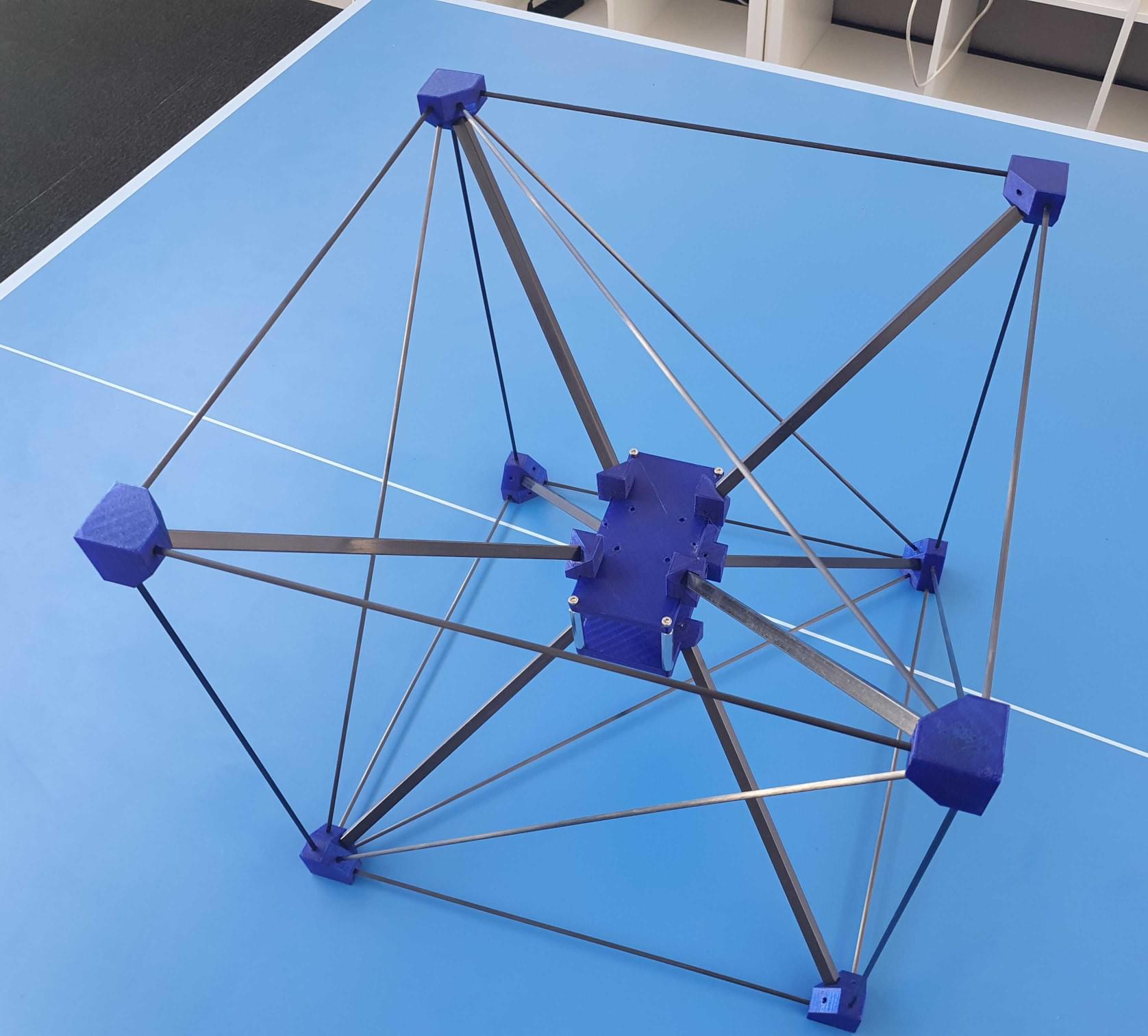
框架组装
- 打印3D零件
INFO
角件的方向很重要。如果方向错误,安装碳棒时角度会不正确。
:::
- 切割碳棒
- 连接框架部件进行测试:
- 安装电机:将电机尽可能向外安装,确保螺旋桨不会碰到碳棒。
电子设备安装
将外围设备焊接到飞行控制器上。我们采用了以下连接方式:
- 电调:2个电调可直接连接到KakuteH7的两个接口。为避免冲突,我们从其中一个接口移除了电源引脚(最右侧引脚)。
- 遥测连接到UART1
- GPS连接到UART4
- 遥控接收器连接到UART6

注意事项:
- 确保磁罗盘远离电源放置。我们最终将其放置在中心部件底部,用4厘米厚的泡沫垫隔开。
- 在气压计上贴一些胶带(不要堵住开口!),避免光线对其产生影响。
- 我们没有对框架进行胶合。在初次试飞后进行胶合是明智之举,但不胶合也可能正常使用。
软件配置
电调配置
首先,将电调配置为3D模式(双向)。我们在使用3D模式下的默认电调设置时遇到问题:尝试切换方向时,有时电机直到电调重启才会再次启动。因此,我们必须更改电调设置。
为此,你可以在飞行控制器上使用Betaflight,然后使用透传模式和BL Heli套件(确保在Betaflight中配置了一个8电机的机架)。具体设置如下:
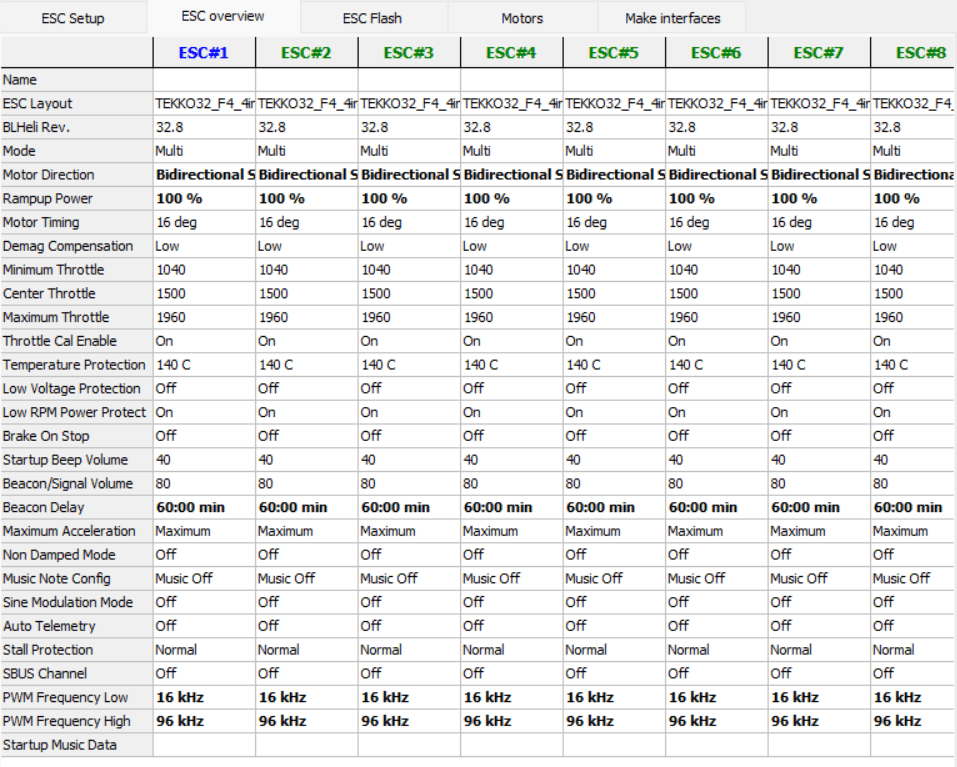
具体而言:
- 将电机方向设置为双向软启动
- 将加速功率增加到100%(此设置较为保守,可能会降低效率)
INFO
确保更改设置后电机不会过热。
ROS相关配置
- 选择通用多旋翼机架
- 使用[解锁开关](../advanced_config/prearm_arm_disarm.md#arming - button - switch),不要使用摇杆解锁
- 在所有八个输出上选择DShot](../config/actuators.md)作为输出协议
- 根据以下方式配置电机:
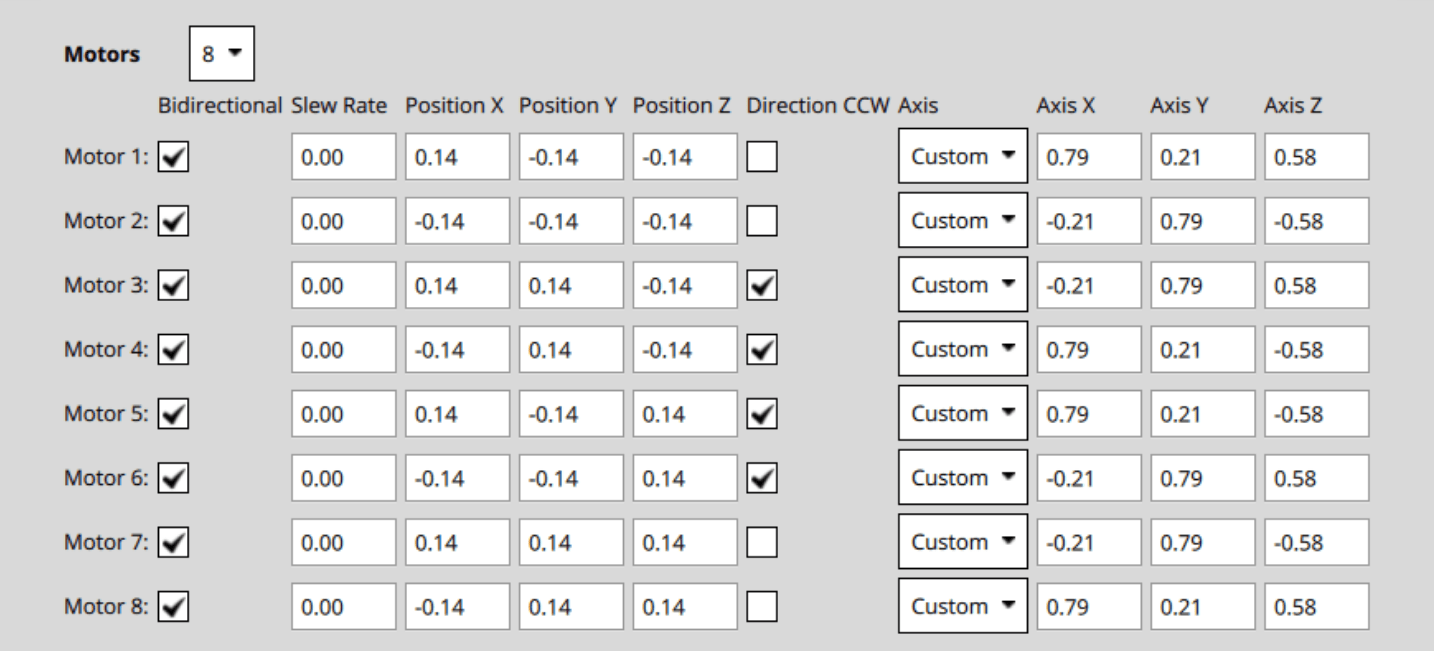 我们采用以下惯例:电机朝向轴所指的方向。旋转方向与正推力方向匹配(向上移动电机滑块)。确保使用正确的螺旋桨,因为有顺时针(CW)和逆时针(CCW)版本。
我们采用以下惯例:电机朝向轴所指的方向。旋转方向与正推力方向匹配(向上移动电机滑块)。确保使用正确的螺旋桨,因为有顺时针(CW)和逆时针(CCW)版本。 - 参数设置:
- [此文件](https://github.com/PX4/PX4 - user_guide/raw/main/assets/airframes/multicopter/omnicopter/omnicopter.params)包含所有相关参数。
视频展示
仿真
在Gazebo Classic中有全向飞行器的仿真目标:
sh
make px4_sitl gazebo - classic_omnicopter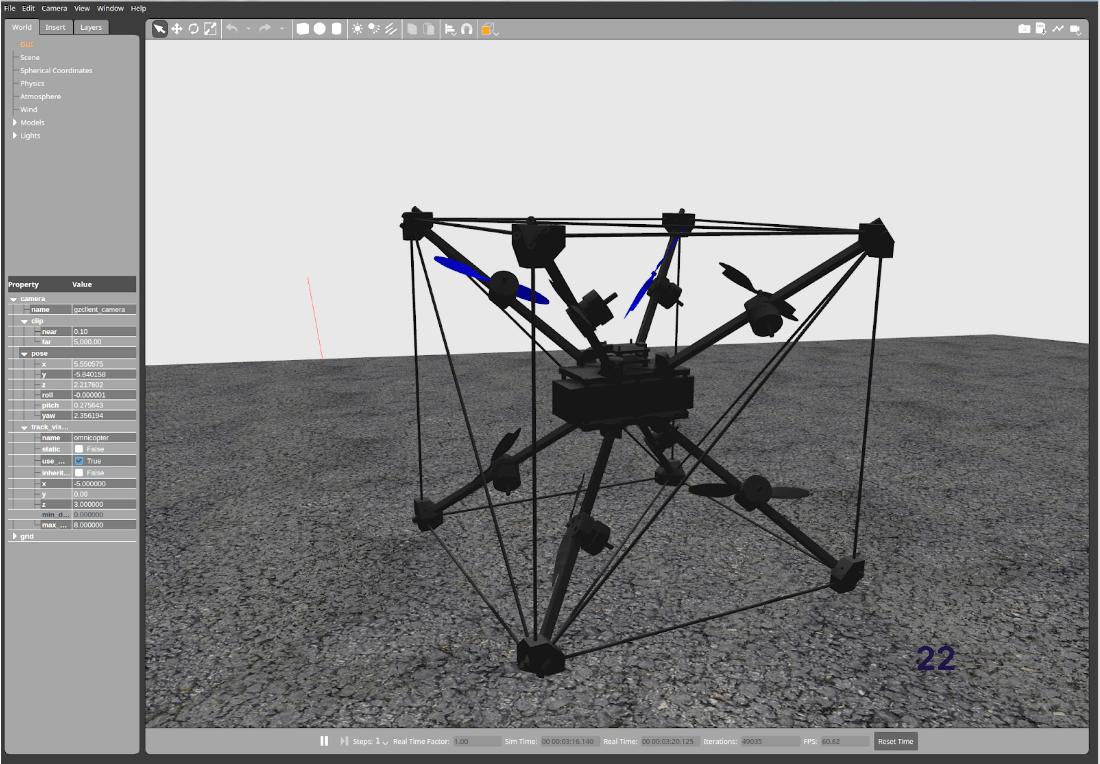
备注
一些通用备注:
- 悬停油门约为30%。
- 飞行时间约为4 - 5分钟。使用更大的螺旋桨可能会有所改善。