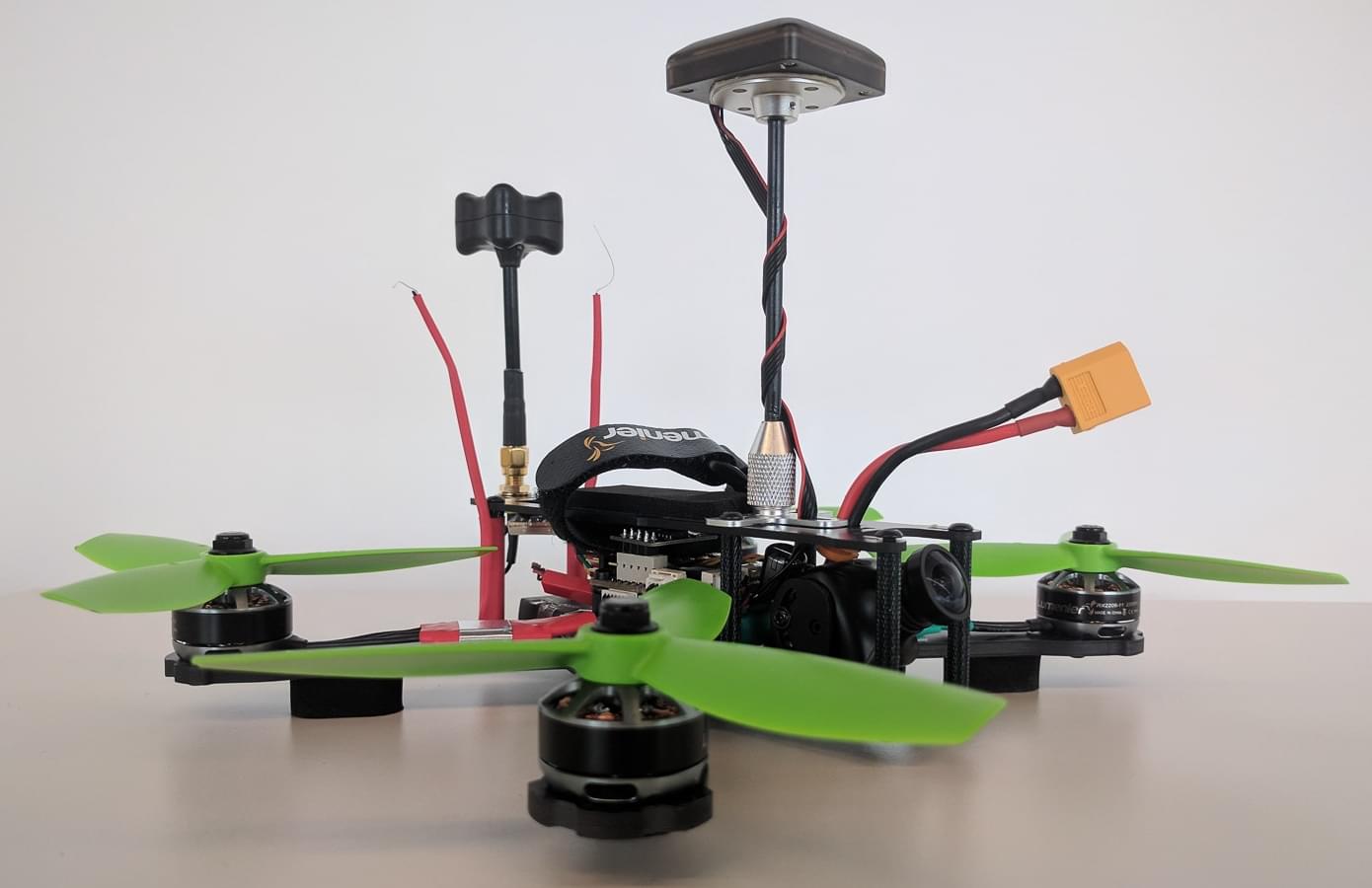
Lumenier QAV - R 5" 竞速无人机(Pixracer)组装指南
Lumenier QAV - R 5" 第一人称视角(FPV)竞速四轴飞行器,具备坚固、轻巧、速度快的特点,且机臂可拆卸。本指南将详细介绍如何将该机架与 Pixracer 飞行控制器及 KISS 24A竞赛版 电调搭配使用,同时还会涉及(可选的)FPV设置。
关键信息
- 机架:Lumenier QAV - R 5"
- 飞行控制器:Pixracer

配件清单
飞行器(飞行必备)
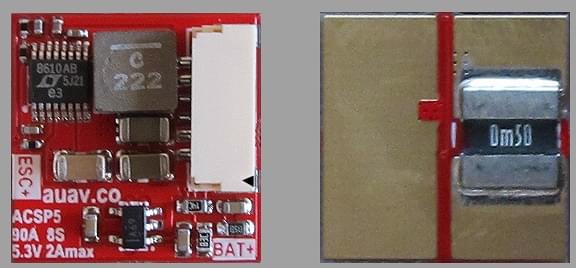
- 自动驾驶仪:Pixracer,购自AUAV,含ESP8266无线模块及ACSP5电源模块。
- 机架:Lumenier QAV - R 5"
- 电机:Lumenier RX2206 - 11 2350KV
- 电调:KISS 24A竞赛版
- 螺旋桨:HQProp 5x4.5x3 顺时针(CW) 逆时针(CCW)
- GPS / 外置磁罗盘:M8N,取自Pixhawk Mini(已停产)套装,需重新布线。
- 电池:TATTU 1800mAh 4s 75c锂聚合物电池
- 遥控接收器:FrSky X4R - SB
- 遥控发射器:FrSky Taranis
- 飞控减震:O型圈
- GPS安装:GPS桅杆
FPV(可选)
- 摄像头:RunCam Swift RR版,配备GoPro高质量广角镜头
- 视频发射机:ImmersionRC Tramp HV 5.8GHz 600mW(已停产)
- 视频天线:TBS Triumph 5.8GHz圆极化(CP)(SMA接口适配ImmersionRC发射机)
- FPV电压源插头:JST公头电池转接线
INFO
以上为标准5.8GHz模拟调频视频发送端配件。若要接收实时视频流,需配备兼容的接收器与显示设备。
基础机架组装
按照此视频9分25秒至13分26秒步骤,组装基础中心板与机臂:
将四个电机安装至机架,电机电缆朝机架中心引出。每个电机使用机架附带的两颗较长螺丝,安装在间距较远的两个孔位。
动力系统搭建
KISS电调性能出色,但存在两个缺点:
- 软件非开源(与BLHeli不同)
- 据了解,无预焊接电线及/或插头的硬件套装
因此,每个电调至少需焊接6个连接点,但仍值得如此操作。
TIP
焊接前,务必在连接两端预先上锡,可简化焊接流程,减少虚焊。
TIP
为电池到电机的大电流电源连接选用合适规格电缆,信号电缆则可相对较细。
TIP
焊接前在电缆套热缩管。功能测试成功后,对电调、电源模块及未绝缘焊点进行热缩处理,防止灰尘、湿气与物理损坏。
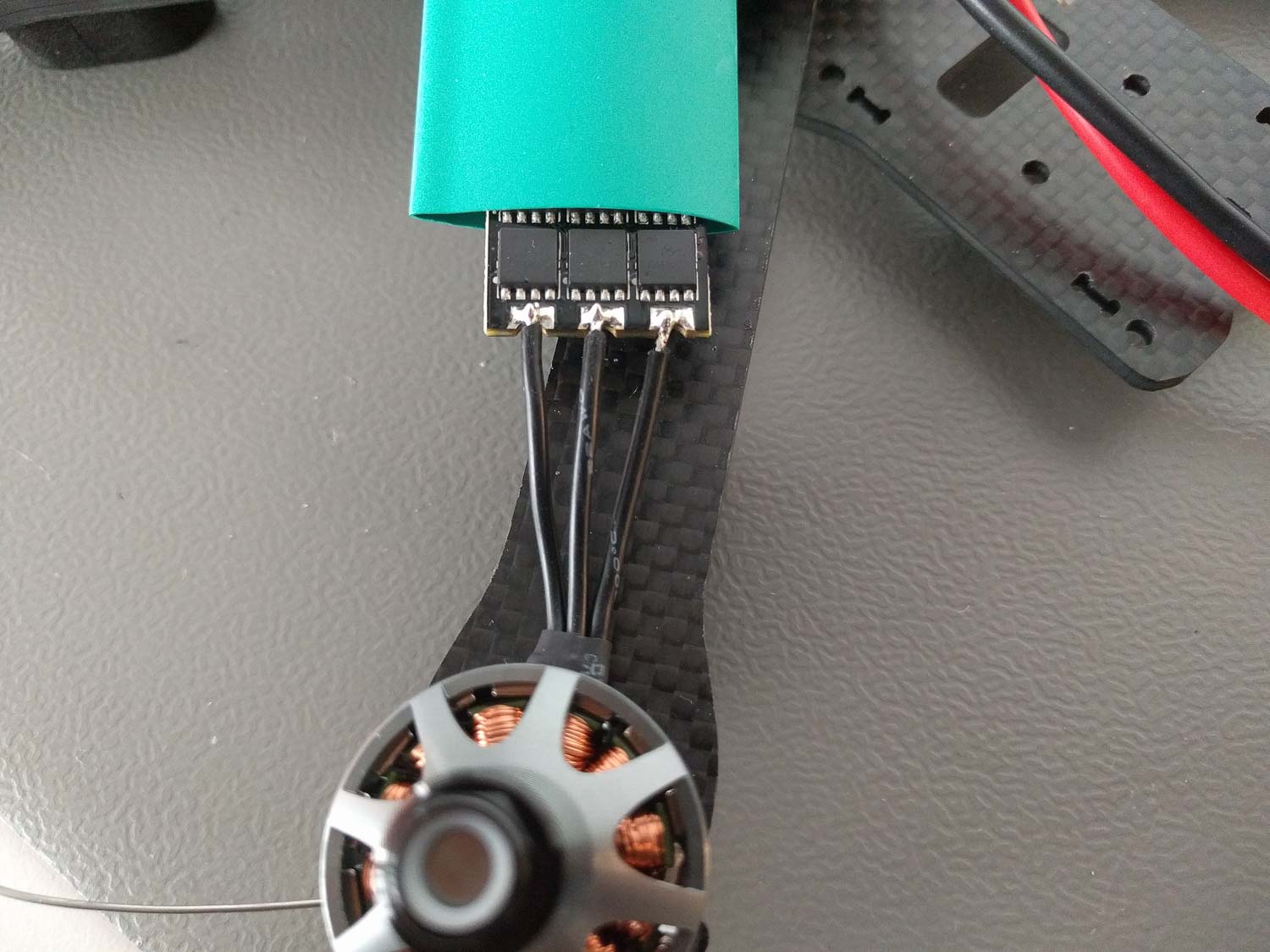
电机安装
先将三根电机电缆剪至合适长度,电调安装在向中心偏移的机臂上时,电缆能直接连接,且有足够余量,便于部件放置,避免电缆受力。接着,按电机出线顺序,将其焊接到电调输出触点,电调开关MOS - FET面朝上,利于飞行时空气冷却。测试中,此电缆顺序使所有电机逆时针旋转,通过桥接JP1焊接跳线,在必要时切换旋转方向,以适配四旋翼X型配置。
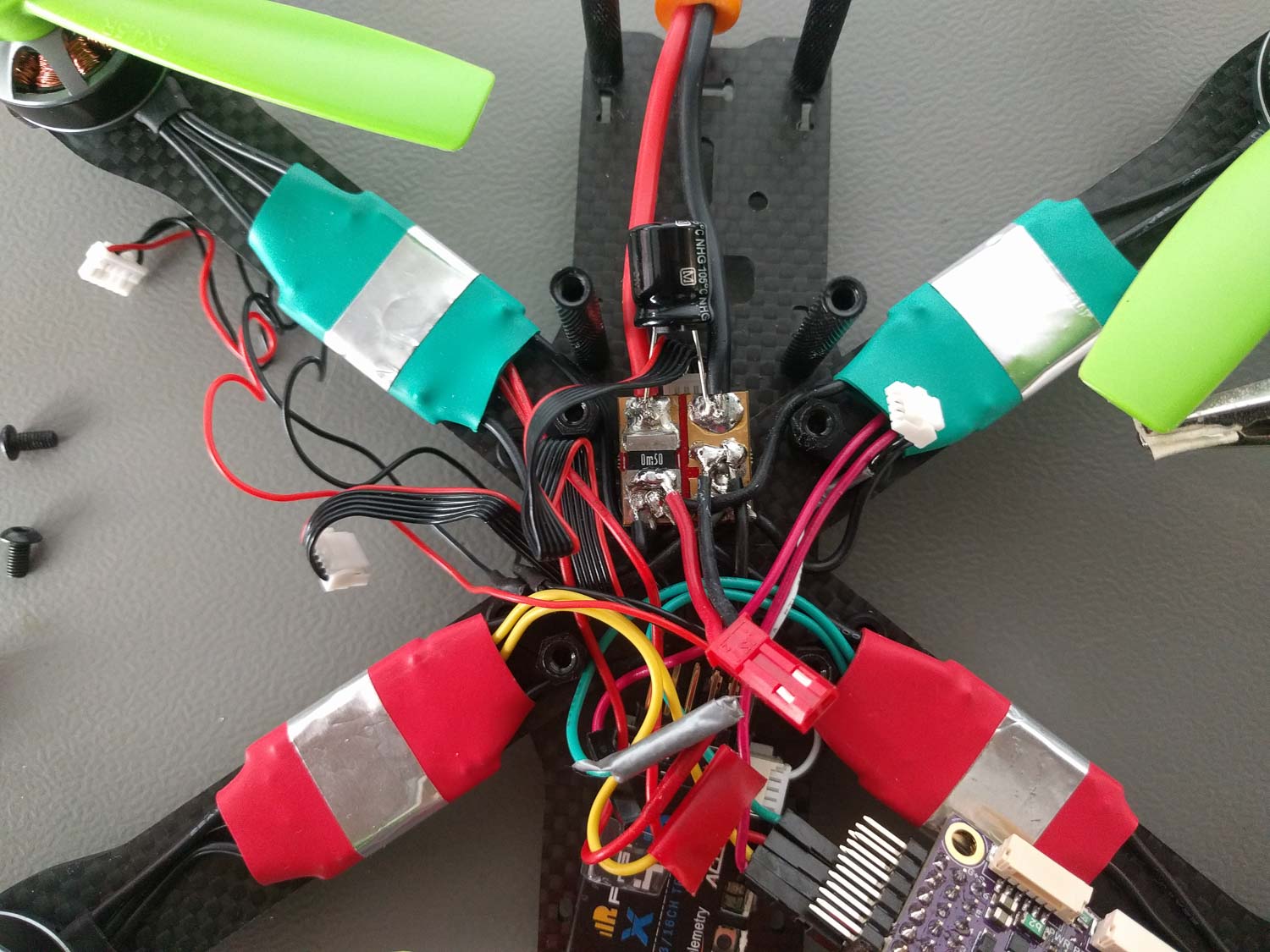
电源模块安装
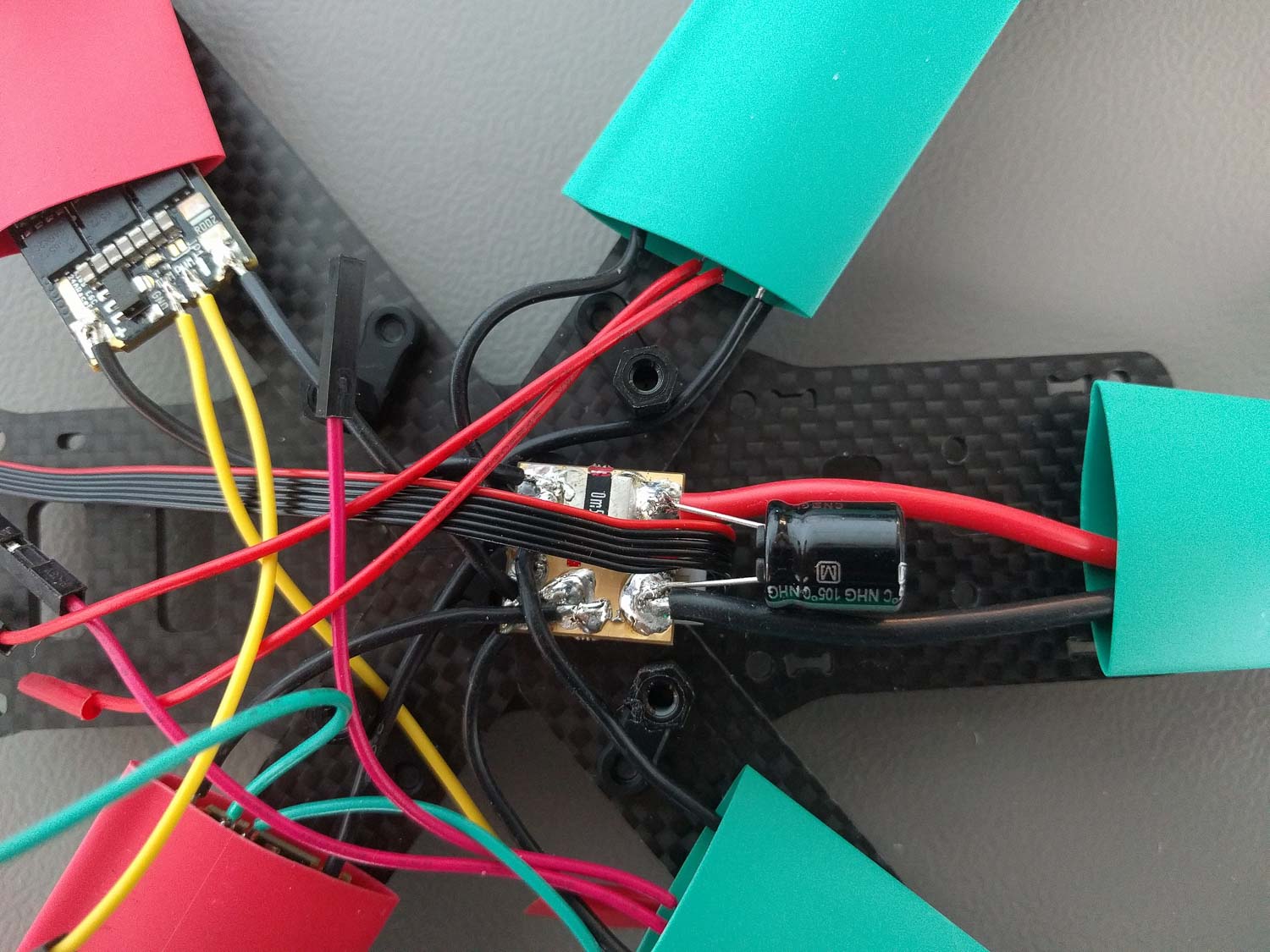
首先,将机架附带的XT60连接器焊接到随Pixracer发货的 ACSP5电源模块 电池侧,并将电源模块附带的电解电容以正确极性连接到同一侧。
接下来是关键步骤,将四个电调的电压源正负极端口,焊接到电源模块电调输出侧的相应焊盘。此处务必避免虚焊,飞行中连接松动会影响飞行安全。虽使用机架附加电源分配板可简化操作,但小机架空间有限……
TIP
若安装FPV部件,别忘将JST公头电源插头焊接到电源模块输出侧,后续FPV设置会用到。
信号电缆连接
选用带标准排针连接器的细电缆,剪成两半用于电调信号连接,方便后续插入Pixracer引脚。飞行仅需KISS电调上标有PWM的端口,连接到Pixracer正确的电机信号输出端。TLM端口用于电调遥测,因PX4目前不支持所需协议,先焊接备用。
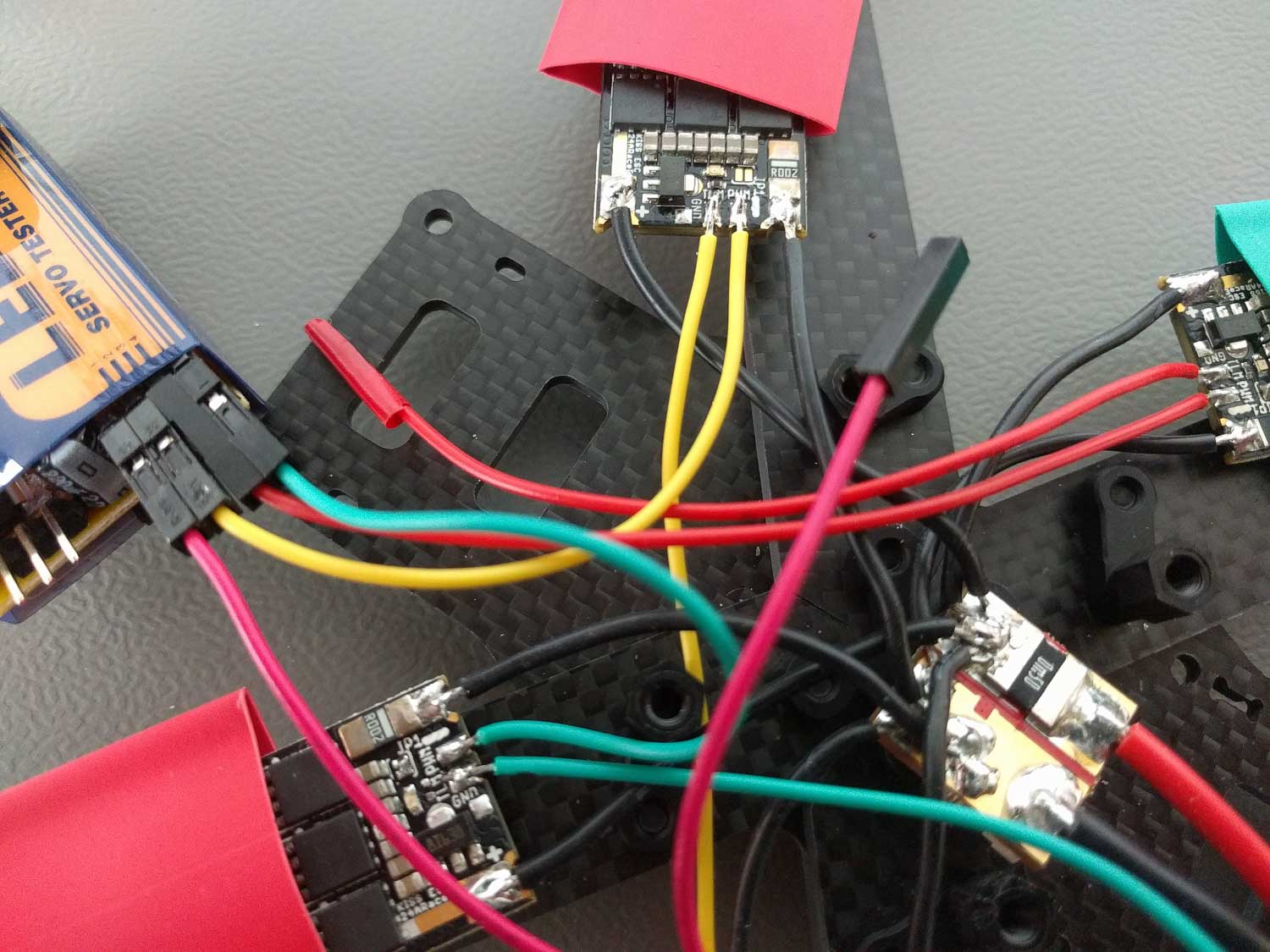
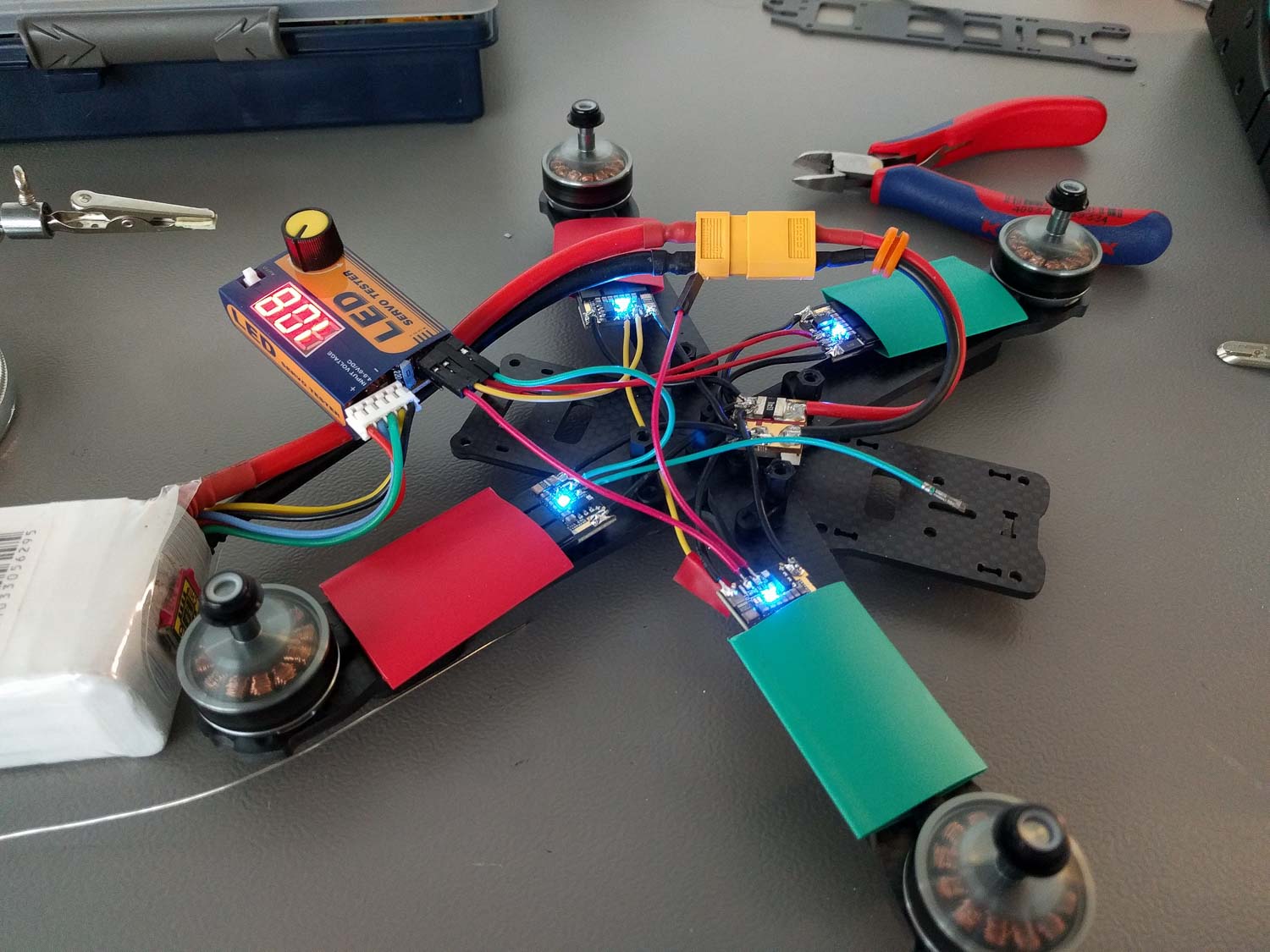
继续下一步前,使用廉价PWM舵机测试仪,测试所有电调 - 电机对及其旋转方向。
电子设备连接与安装
TIP
连接各组件时,仔细核对引脚分配,并非所有硬件都即插即用。
此步骤需参考Pixracer硬件文档确定所需连接器。将所有电缆布置在Pixracer板下方,保持整洁,为后续FPV摄像头与发射器预留空间。
使用QAV - R机架附带的尼龙垫片与螺丝安装Pixracer,在板与垫片间放置小O型圈减震。螺丝拧紧程度要适中,确保板与两侧接触良好且不受紧压。板不应晃动,但手指施力时应能轻微移动。
WARNING
此操作会显著影响飞行中陀螺仪与加速度计传感器测量的振动噪声水平。

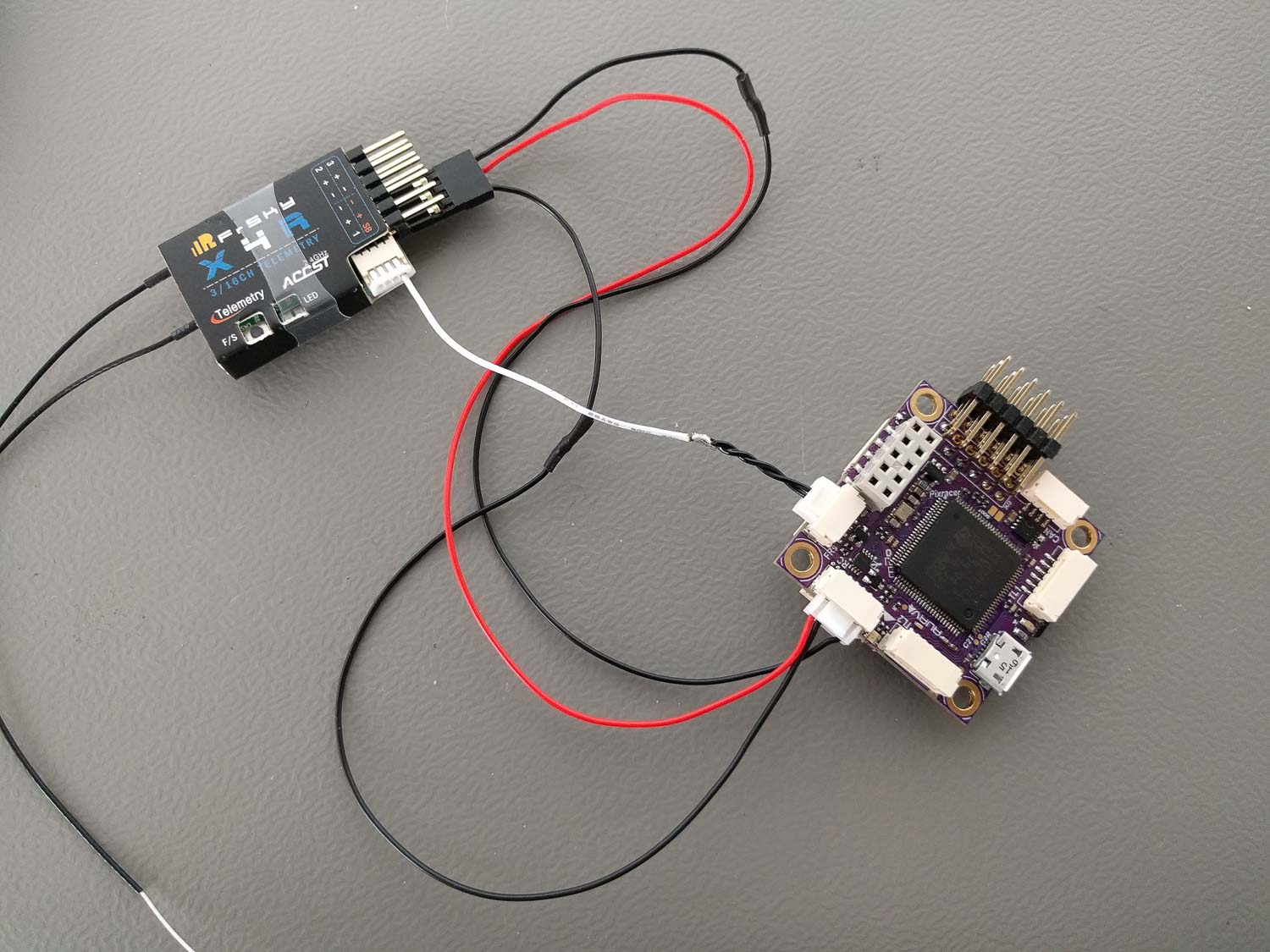
遥控接收器连接
使用Pixracer附带电缆连接FrSky S - BUS接收器,剪掉多余分支。
智能遥测端口使用接收器附带电缆,用镊子移除连接器多余引脚,将白色松散端电缆切换到正确引脚连接“智能”信号。按此原理图将松散端焊接到适配FrSky端口的电缆:

因接地(GND)引脚与电源正极引脚已通过RCin S - BUS电缆连接,故跳过此引脚。
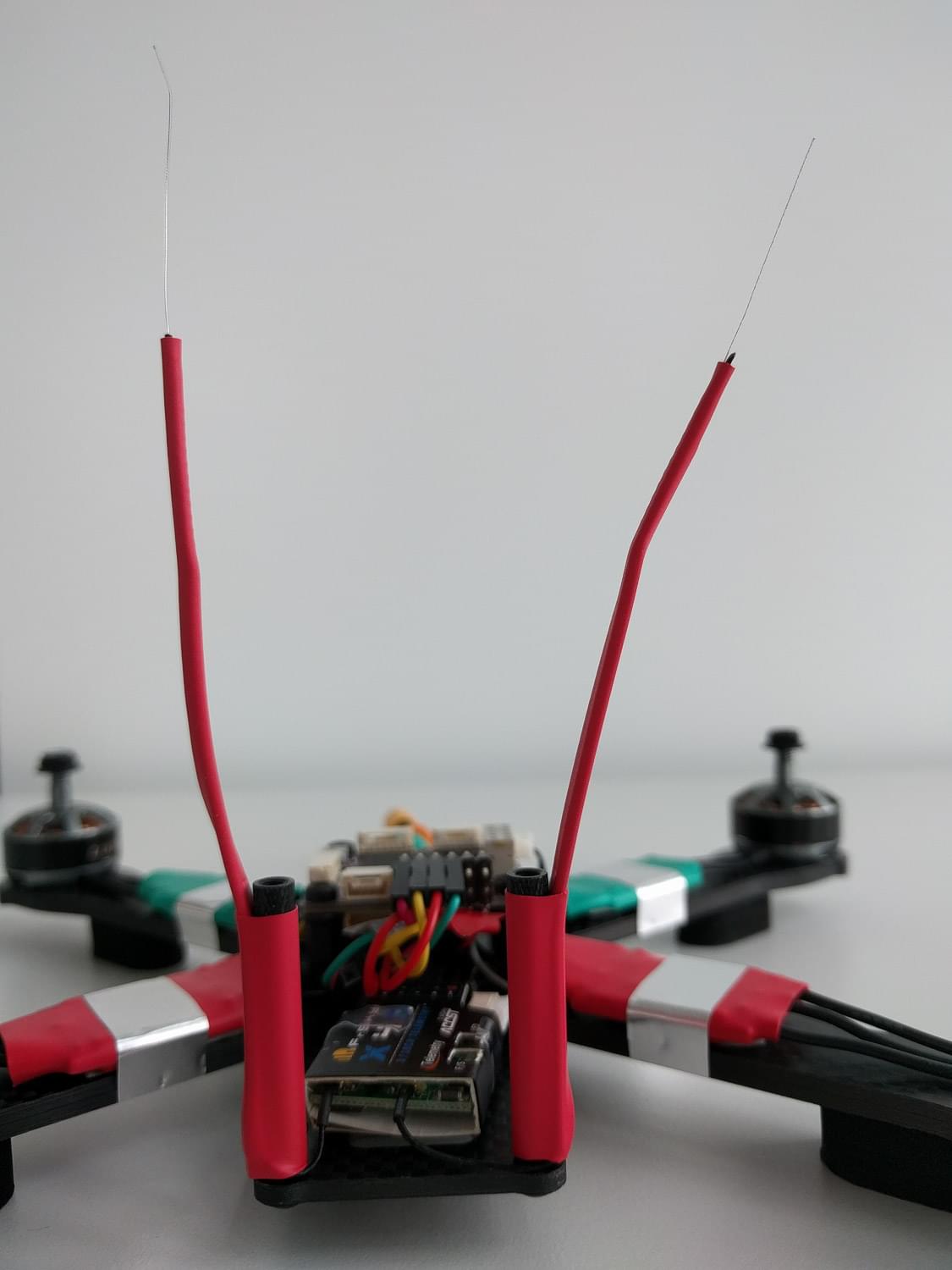
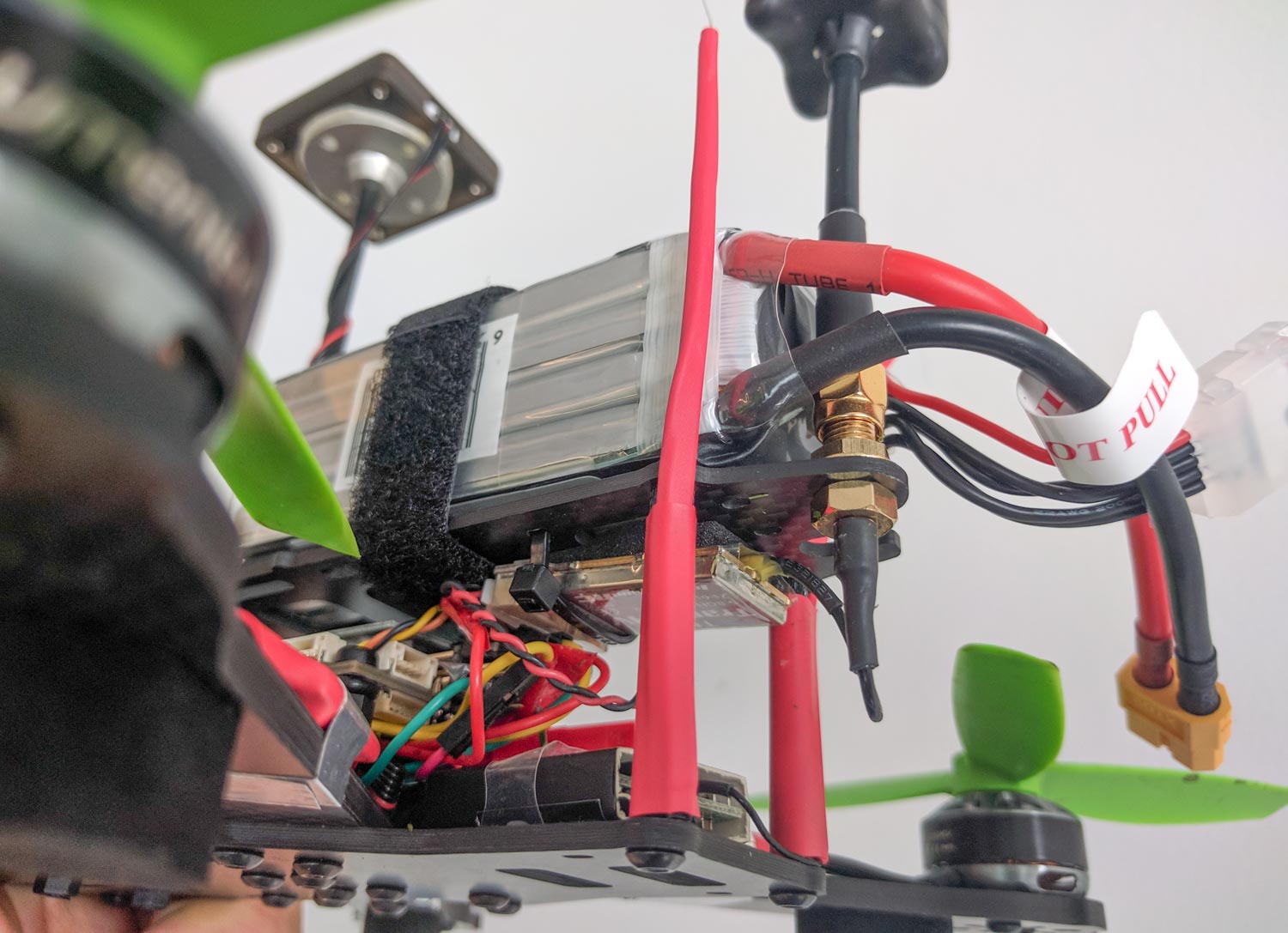
遥控天线安装
为确保遥控链路良好且天线不接触螺旋桨,采用热缩管与扎带的稳固安装方法。
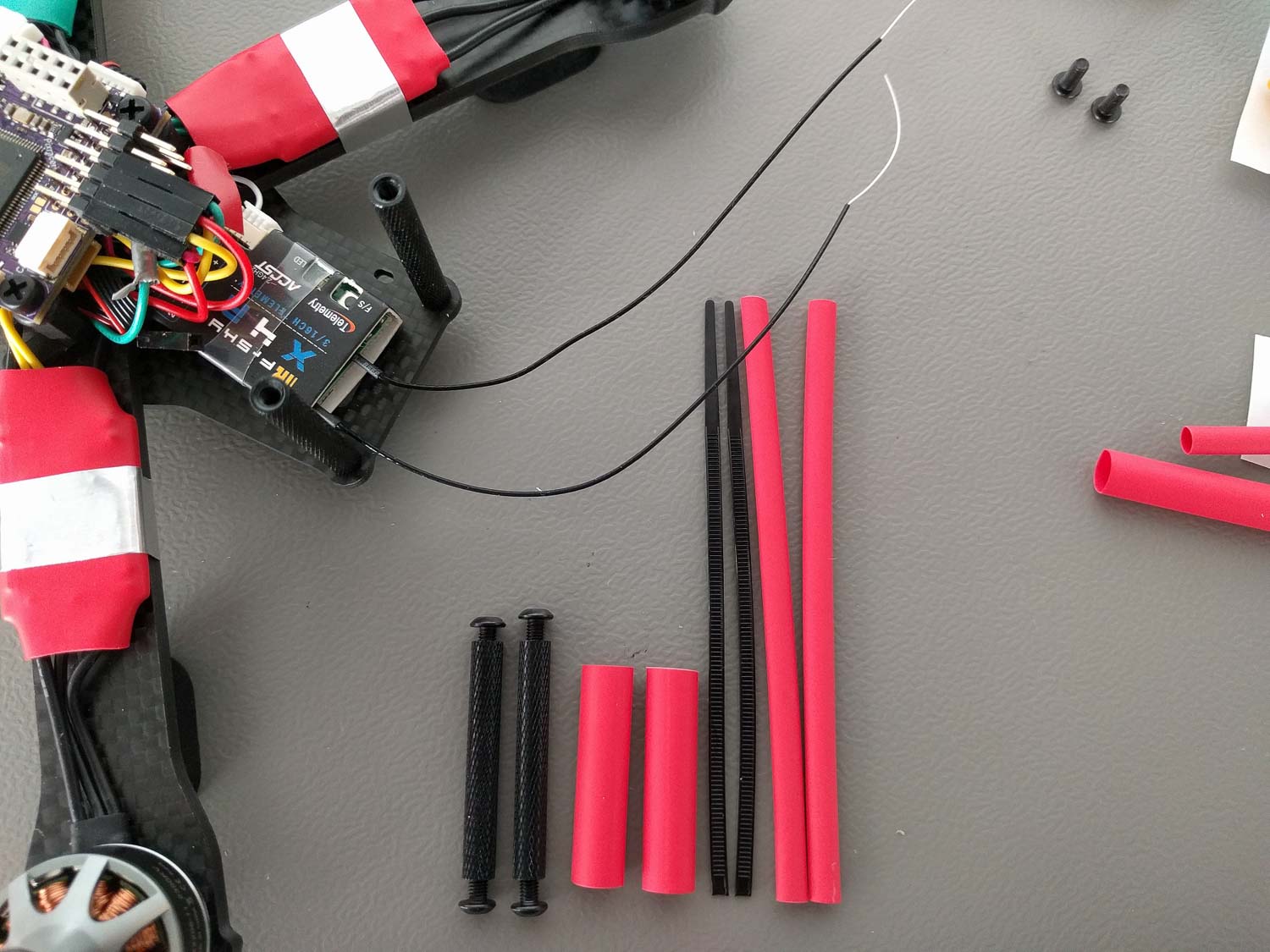
具体操作:剪掉扎带带孔大端,将剩余部分与天线电缆穿过长热缩管,再用较大短热缩管固定到机架垫片。
电调信号连接
依据Pixracer硬件文档与四旋翼X型配置电机编号方案连接电调信号。因无接地或正BEC电压连接,将电调PWM信号电缆连接到相应输出连接器最上方引脚。
GPS / 外置磁罗盘安装
使用与GPS匹配且随Pixracer提供的电缆,但引脚分配错误,依据3DR Pixhawk Mini用户手册中的GPS端口,用镊子重新布线。
Pixracer GPS/I2C端口
| 针脚 | 功能 |
|---|---|
| 1 | 地(GND) |
| 2 | 串行数据(SDA) |
| 3 | 串行时钟(SCL) |
| 4 | 接收(RX) |
| 5 | 发送(TX) |
| 6 | +5V |
M8N 3DR Pixhawk mini GPS连接器
| 针脚 | 功能 | 连接至Pixracer针脚 |
|---|---|---|
| 1(红) | 串行时钟(SCL) | 3 |
| 2 | 串行数据(SDA) | 2 |
| 3 | 5V电源(VCC 5V) | 6 |
| 4 | 接收(RX) | 5 |
| 5 | 发送(TX) | 4 |
| 6 | 地(GND) | 1 |
使用通用多旋翼GPS桅杆安装GPS模块,靠近主体安装会使磁罗盘读数无效。实验将模块直接安装在机架顶部后端,磁罗盘幅度噪声增大6倍,推测由电调电流磁场引起。将桅杆缩短约2厘米,适配电缆长度与机架尺寸,用双面胶将GPS模块粘贴在桅杆顶板。
FPV设置
此为可选的5.8GHz FPV实时视频传输设置说明,需准备前文列出的额外FPV配件。此处FPV传输与飞行控制器电气独立,仅从电源模块后获取电池电压。
先进行台架测试确保正常工作。连接发射器附带视频信号电缆,分别插入FPV摄像头与发射器匹配插头。将JST电源插头连接飞行器或其他电压源,发射器LED应亮起。使用调至正确频道的5.8GHz接收器设备检查视频。如需配置发射器频道与调整传输功率,参考Tramp HV用户手册。
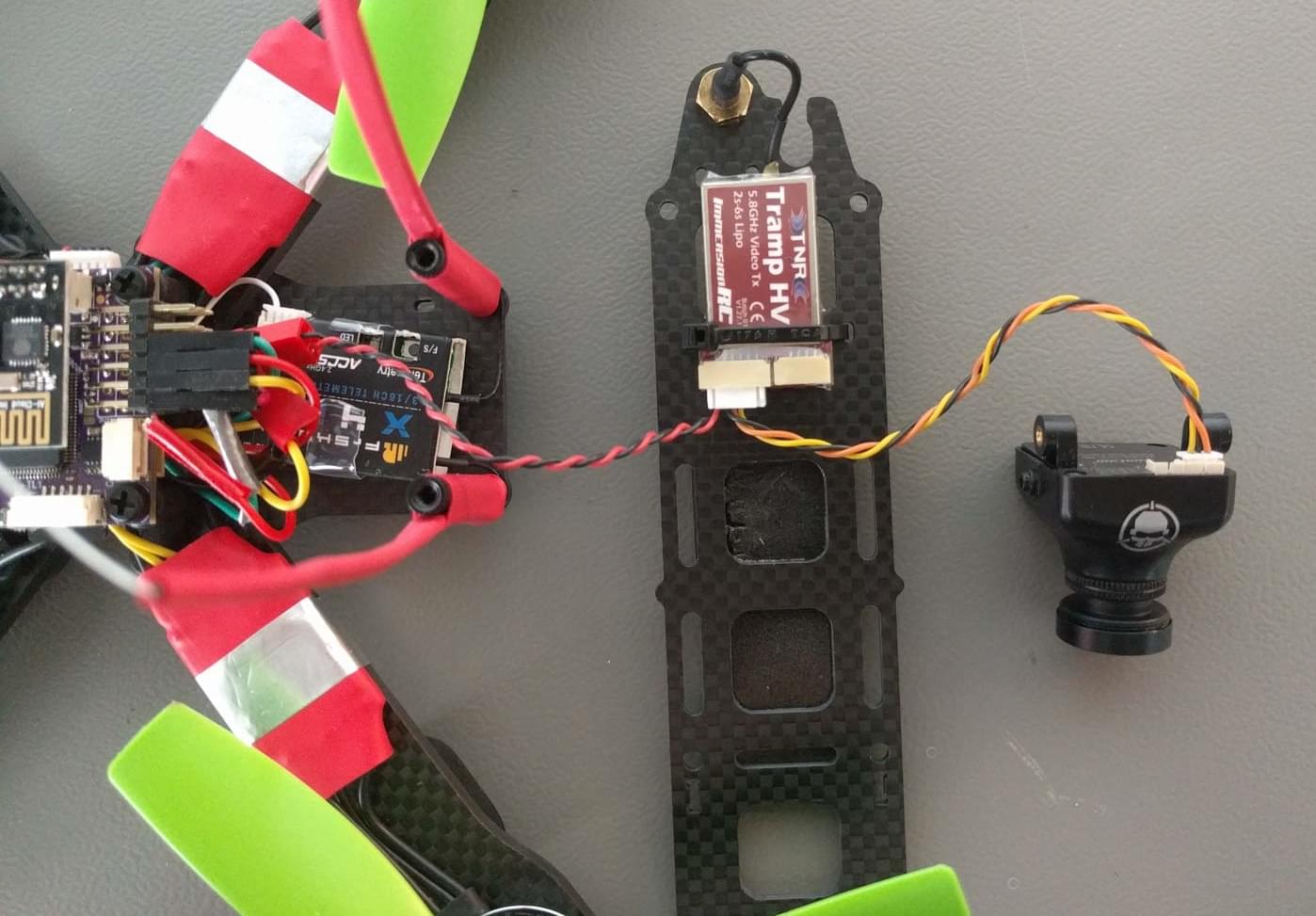
如你所见,使用扎带从内部将发射器安装到机架“顶部”。安装此类电子设备时,在中间放置自粘泡沫,防止飞行时物理损坏。确保发射器位置使天线连接器适配机架专用孔位。
配件清单中的FPV摄像头套件,不仅有优质镜头,还配备多个摄像头支架,其中一个可灵活调整角度,与QAV - R机架适配良好。按下图所示安装,固定摄像头支架的螺丝与螺母取自机架套件备用件。

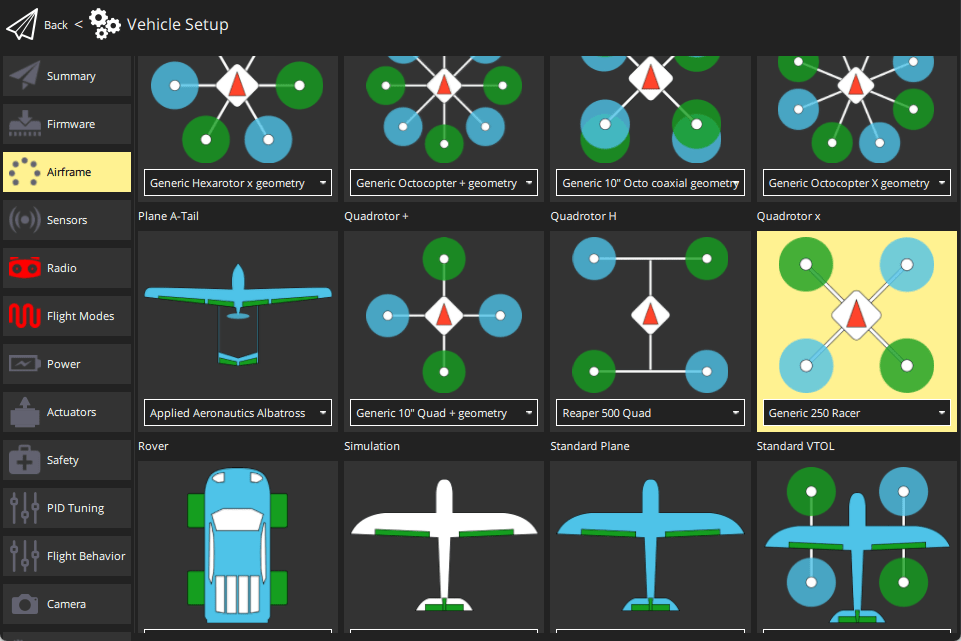
PX4配置
使用 QGroundControl 安装PX4自动驾驶仪,并针对机架进行配置与调校。根据平台下载并安装 QGroundControl。
TIP
安装与配置PX4的详细说明见基础配置。
WARNING
初始配置时,务必移除电池或螺旋桨,确保安全。
首先更新固件、机架及执行器映射:
- 执行器
- 无需更新飞行器几何参数。
- 根据布线分配执行器功能到输出端口。
- 使用滑块测试配置。
然后进行必要设置与校准:
理想情况下,还应进行:
调试
机架选择会为其设置自动驾驶仪默认参数,虽可满足飞行,但针对特定机架调校参数更佳。
具体调校方法,参考自动调校(多旋翼)。