Durandal 接线快速入门
PX4 v1.11WARNING
PX4 不生产此(或任何)自动驾驶仪。若需硬件支持或解决合规性问题,请联系制造商。
本快速入门指南介绍如何为 Holybro Durandal® 飞行控制器供电,并连接其最重要的外围设备。

开箱
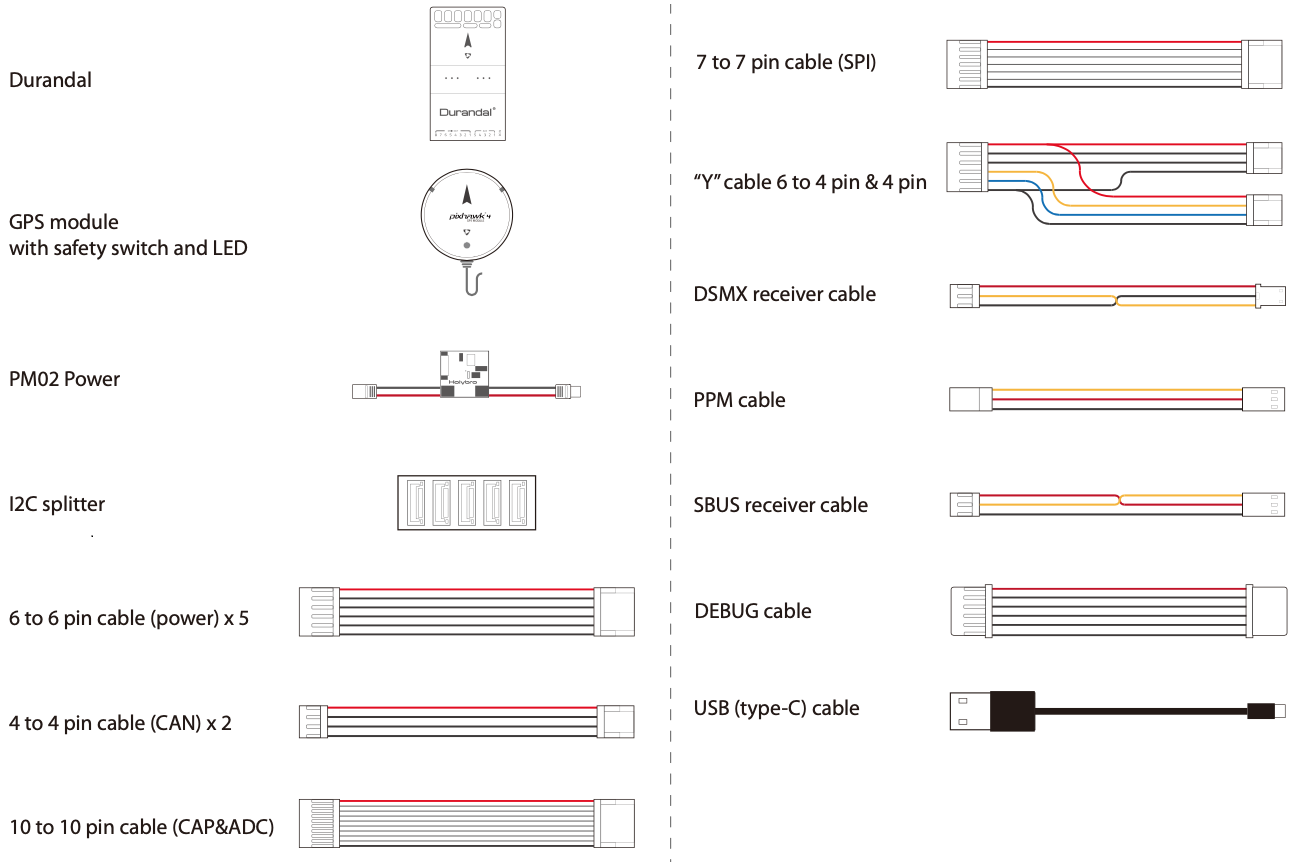
Durandal 销售时搭配多种不同组合的配件,包括电源模块:PM02 V3 和 PM07,以及 Pixhawk 4 GPS/指南针(u-blox NEO-M8N)。
下方展示了包含 PM02 V3 电源模块的包装盒内容(包装盒还包括针脚定义指南和电源模块说明)。
接线图概述
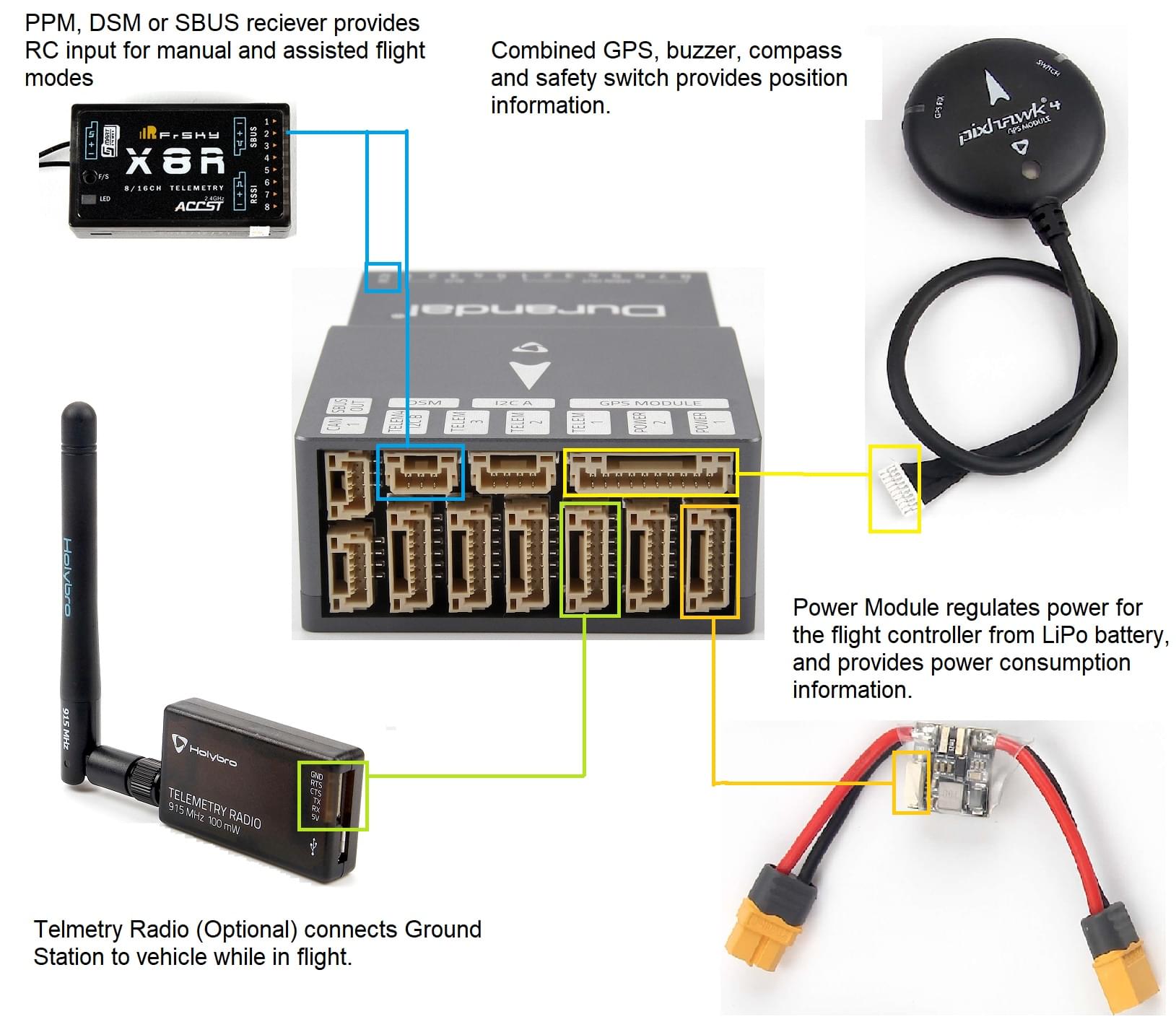
下图展示了如何连接最重要的传感器和外围设备(电机和伺服舵机输出除外),我们将在后续各节详细介绍。
TIP
有关可用端口的更多信息,请查看:Durandal > 针脚定义。
飞控的安装和方向
Durandal 应安装在机架上,尽可能靠近飞行器的重心位置,正面朝上,箭头指向飞行器前方。
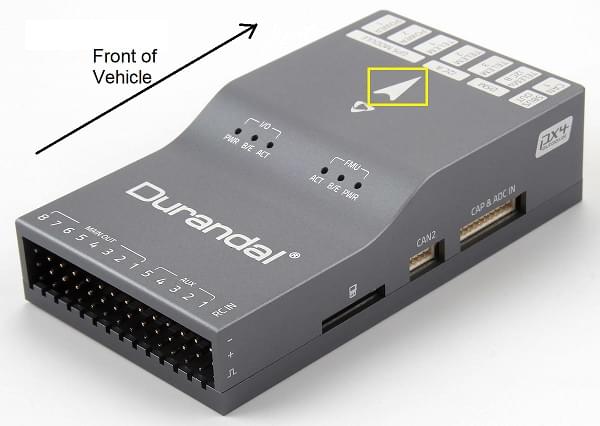
如果由于空间限制等原因无法按推荐的默认方向安装控制器,则需要在自动驾驶软件中配置实际使用的方向:飞行控制器方向。
TIP
该飞控板具有内部隔振功能,无需使用隔振泡沫来安装控制器(通常双面胶带即可)。
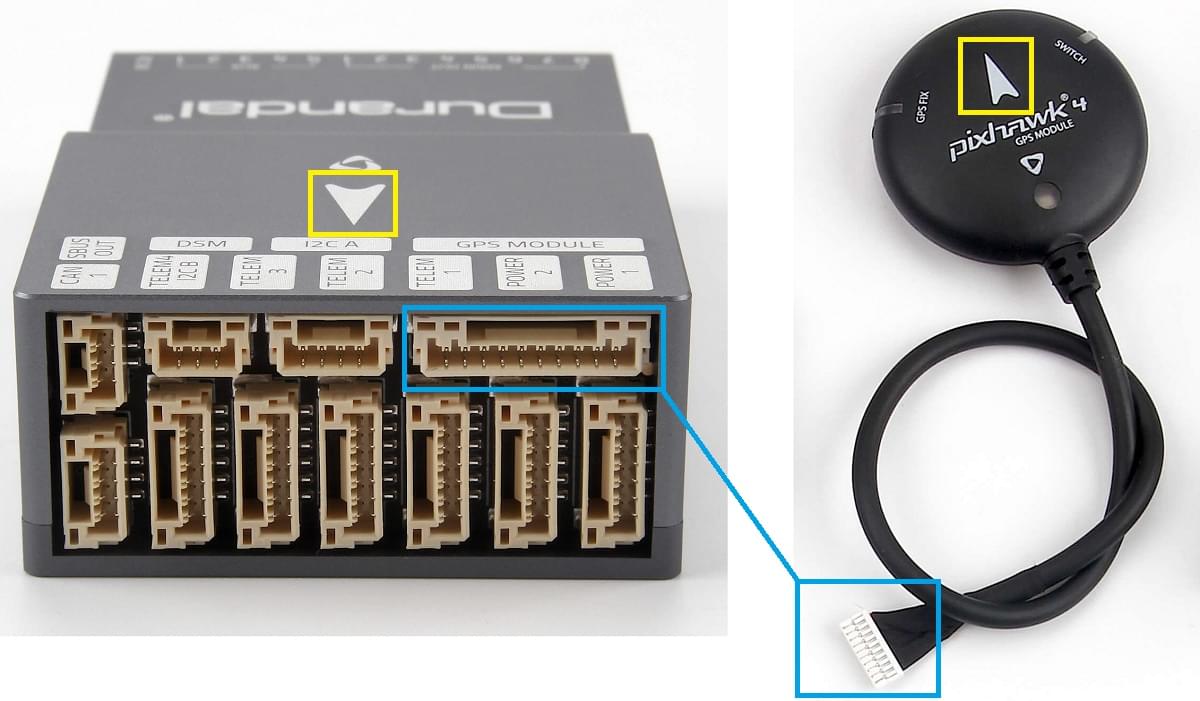
GPS + 指南针 + 蜂鸣器 + 安全开关 + LED
Durandal 设计为与 Pixhawk 4 GPS 模块 配合良好,该模块集成了指南针、安全开关、蜂鸣器和 LED。它使用 10 针电缆直接连接到 GPS 端口。
GPS/指南针应安装在机架上,尽可能远离其他电子设备,方向标记指向飞行器前方(将指南针与其他电子设备分开可减少干扰)。
INFO
GPS 模块集成的安全开关默认处于启用状态(启用时,PX4 将阻止飞行器解锁)。要禁用安全开关,长按安全开关 1 秒钟。可以再次按下安全开关以启用安全功能并使飞行器解除武装(如果由于某种原因无法通过遥控器或地面站使飞行器解除武装,此功能可能会很有用)。
电源
可以使用电源模块或电源分配板为电机/舵机供电并测量功耗。推荐的电源模块如下所示。
PM02 v3 电源模块
电源模块(PM02 v3) 可与 Durandal 捆绑销售。它为飞行控制器提供稳压电源,并将电池电压/电流发送到飞行控制器。
按下图所示连接电源模块的输出。
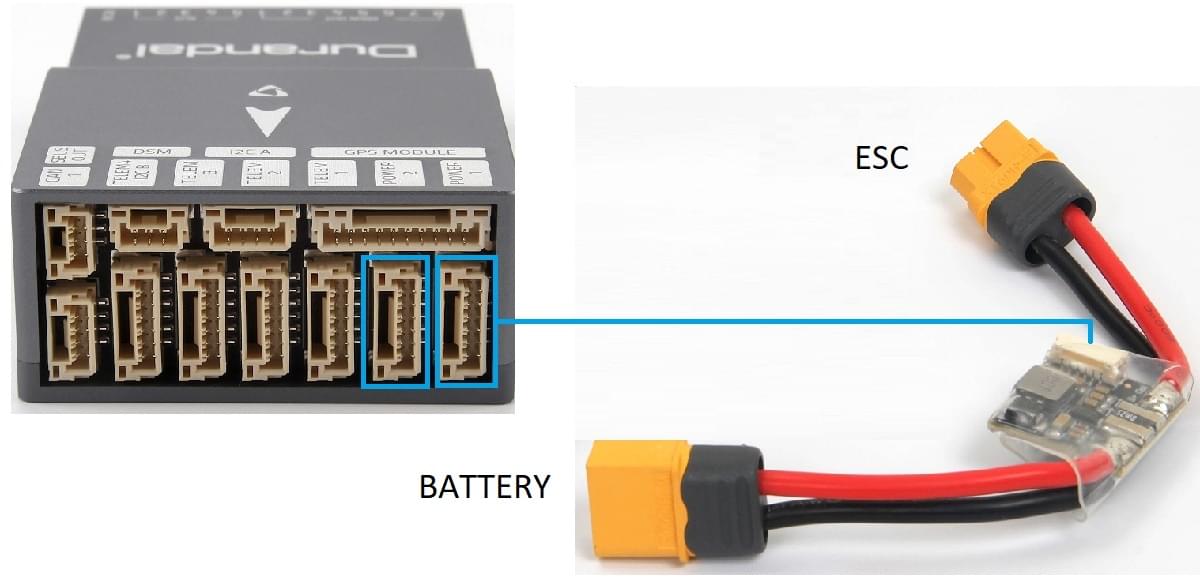
- PM 电压/电流端口:使用随附的 6 线 GH 电缆连接到 POWER1 端口(或
POWER2)。 - PM 输入(XT60 公头连接器):连接到锂聚合物电池(2 - 12S)。
- PM 电源输出(XT60 母头连接器):引出至任何电机电调。
TIP
由于此电源模块不包括配电线路,通常只需将所有电调并联连接到电源模块输出(电调必须适用于所提供的电压水平)。
TIP
MAIN/AUX 的 8 针电源(+)轨不由飞行控制器的电源模块供电。如果需要为方向舵、升降副翼等舵机单独供电,则电源轨需要连接到配备 BEC 的电调、独立的 5V BEC 或 2S 锂聚合物电池。确保所使用舵机的电压合适。
Pixhawk 4 电源模块(PM07)
Pixhawk 4 电源模块(PM07) 可与 Durandal 捆绑使用。它兼具电源模块和电源分配板的功能,为飞行控制器和电调提供稳压电源,并将电池电压/电流发送到飞行控制器。
其接线方式与 Pixhawk 4 快速入门 > 电源 文档中所述相同。
它具有以下特性/限制:
- PCB 电流:总输出 120A(最大)
- UBEC 5V 输出电流:3A
- UBEC 输入电压:7 - 51V(2 - 12S 锂聚合物电池)
- 尺寸:68_50_8 mm
- 安装孔:45 * 45mm
- 重量:36g
- 包装内容:
- PM07 板(1 块)
- 80mm XT60 连接器电线(1 根)
INFO
另请参阅 PM07 快速入门指南(Holybro)。
电池配置
必须在 电池估算调整 中配置电池/电源设置。对于任何一种电源模块,都需要配置“电池电芯数量”。
除非使用其他电源模块(例如 Pixracer 的电源模块),否则无需更新“分压器”。
遥控器
如果要手动控制飞行器,则需要遥控器(RC)无线电系统(PX4 自动驾驶模式无需无线电系统)。
您需要选择兼容的发射器/接收器,然后进行“绑定”以使它们能够通信(请阅读您特定发射器/接收器附带的说明)。
以下说明展示了如何将不同类型的接收器连接到 Durandal:
- Spektrum/DSM 接收器:连接到 DSM RC 输入。

- PPM 和 S.Bus 接收器:连接到 SBUS_IN/PPM_IN 输入端口(标记为 RC IN,位于 MAIN/AUX 输入旁边)。
- 每个通道都有单独电线的 PPM 和 PWM 接收器:必须通过 这样的 PPM 编码器连接到 PPM RC 端口(PPM - Sum 接收器使用单根信号线传输所有通道信号)。
有关选择无线电系统、接收器兼容性以及绑定发射器/接收器对的更多信息,请参阅:遥控器发射器和接收器。
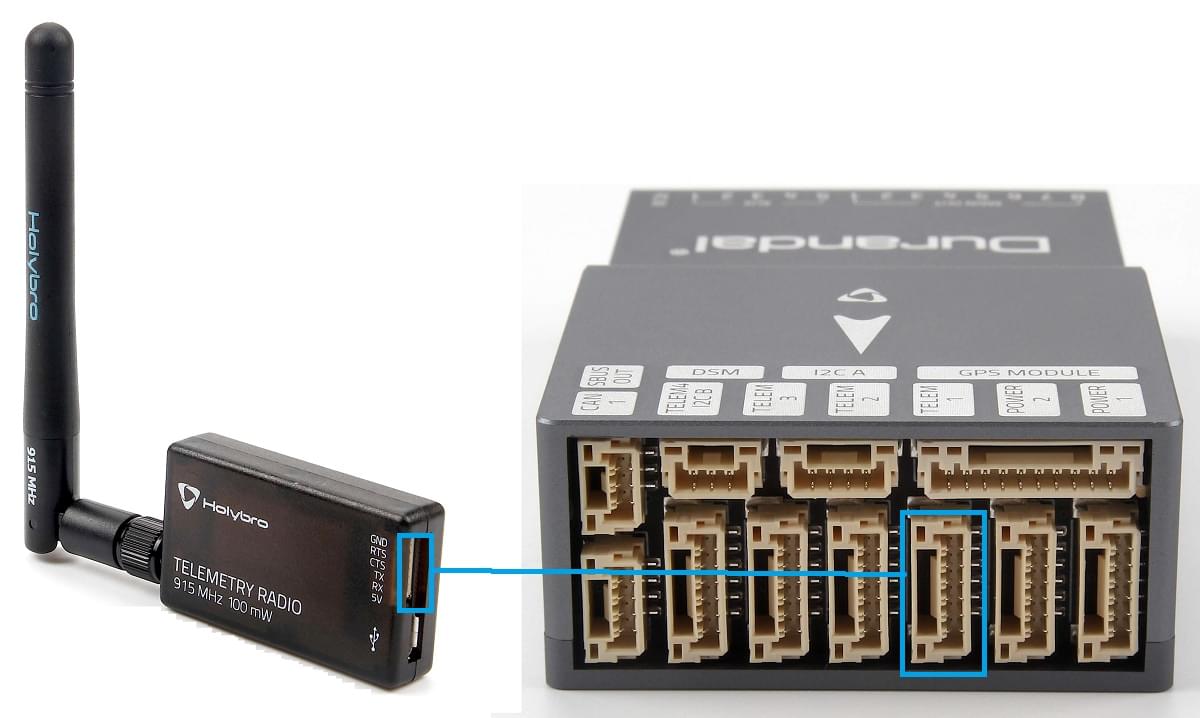
遥测无线电台(可选)
遥测无线电台可用于从地面站与飞行中的飞行器进行通信和控制(例如,您可以指示无人机前往特定位置,或上传新任务)。
飞行器端的无线电台应使用 6 针连接器之一连接到 TELEM1 端口,如下所示(如果连接到此端口,则无需进一步配置)。另一个无线电台连接到地面站计算机或移动设备(通常通过 USB 连接)。
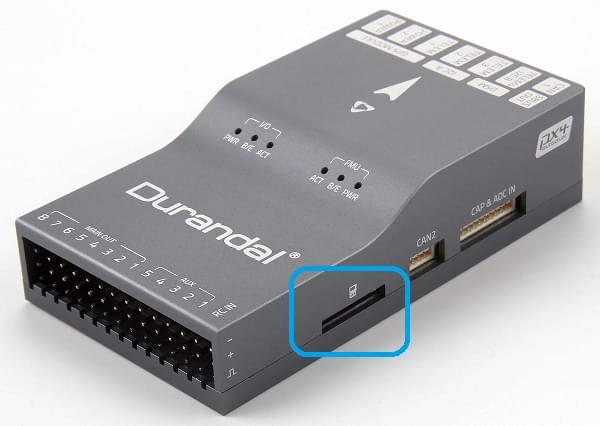
SD 卡
强烈建议使用 SD 卡,因为需要用它来记录和分析飞行细节、运行任务以及使用 UAVCAN 总线硬件。将 SD 卡插入 Durandal 所示位置。
TIP
更多信息请参阅 基本概念 > SD 卡(可移动存储器)。
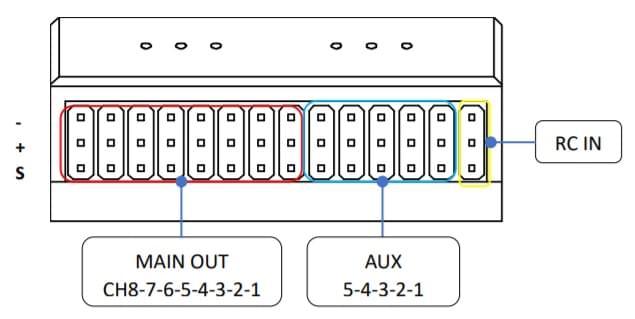
电机
电机/舵机控制信号按照 机架参考 中为您的飞行器指定的顺序连接到 I/O PWM OUT(MAIN OUT)和 FMU PWM OUT(AUX)端口。
电机必须单独供电。
INFO
如果您的机架未在机架参考中列出,则使用正确类型的“通用”机架。
TIP
Durandal 有 5 个 AUX 端口,因此不能用于将 AUX6、AUX7、AUX8 映射到电机或其他关键飞行控制的机架。
其它外设
可选或不太常见组件的接线和配置在各个外围设备相关主题中介绍。
针脚定义
PX4 配置
首先,您需要使用 QGroundControl 将 PX4 “主” 固件 安装到控制器上。
INFO
Durandal 支持将包含在 PX4 v1.10 之后的 PX4 稳定版本中。
更多常规配置信息请参阅:自动驾驶仪配置。
QuadPlane 特定配置请参阅:QuadPlane VTOL 配置
更多信息
- Durandal 概述
- Durandal 技术数据表(Holybro)
- Durandal 针脚定义(Holybro)
- Durandal_MB_H743sch.pdf(Durandal 原理图)
- STM32H743IIK_pinout.pdf(Durandal 引脚映射)