基础飞行(多旋翼飞行器)
本主题介绍如何使用遥控器(RC Transmitter)或操纵杆(Joystick),在手动或自动驾驶辅助飞行模式下驾驶飞行器(关于自主飞行,请参阅:任务飞行(Missions))。
INFO
在首次飞行前,你应阅读我们的首次飞行指南。
解锁飞行器
在飞行之前,飞行器必须先进行解锁操作。这将启动所有电机和执行器。除非你正在进行抛飞发射(Throw Launch),否则螺旋桨也会开始转动。
要解锁无人机:
- 首先解除安全开关(如果有的话)。
- 使用适合你飞行器的解锁指令:
TIP
在飞行器完成校准/配置并获得位置锁定之前,它无法解锁。飞行器状态通知(包括飞行器上的LED指示灯、音频通知以及QGroundControl的更新)可以告知你飞行器何时准备好飞行(并在未准备好时帮助你找出原因)。
INFO
默认情况下(通过COM_DISARM_PRFLT参数),如果你在解锁后过长时间未起飞,飞行器将自动锁定(解除动力)(关闭电机)!这是一项安全措施,确保飞行器在不使用时回到安全状态。
起飞
多旋翼飞行器的操控者可以通过启用任何手动模式、解锁飞行器,然后提升油门摇杆,直到电机产生足够的推力使飞行器离开地面,从而实现手动起飞。在位置模式或高度模式下,油门摇杆必须提升至62.5%以上,以指令爬升率并使飞行器离开地面。超过此值后,所有控制器将启用,飞行器将达到悬停所需的油门水平(MPC_THR_HOVER)。
飞行器也支持抛飞发射(Throw Launch),即飞行器在检测到自己到达抛飞顶点后启动电机,然后根据当前模式运行。
或者,也可以通过切换到自动起飞模式来执行起飞操作。
INFO
如果你在解锁后过长时间未起飞,飞行器可能会锁定(可使用COM_DISARM_PRFLT调整超时时间)。
INFO
如果起飞过程中出现问题,故障探测器(Failure Detector)将自动停止发动机。
降落
多旋翼飞行器可以在任何手动模式下降落。在飞行器触地后,务必保持油门摇杆向下拉,直到电机停止转动。
请注意,默认情况下,飞行器着陆时会自动锁定:
- 使用COM_DISARM_LAND设置着陆后自动锁定的时间(或完全禁用该功能)。
- 将油门摇杆置于左下角手动锁定。
INFO
如果你在着陆过程中看到飞行器 “抽搐”(降低电机功率,然后立即再次提高),这可能是由于着陆探测器配置不当(Land Detector Configuration)造成的(具体来说,是MPC_THR_HOVER设置不当)。
飞行控制/指令
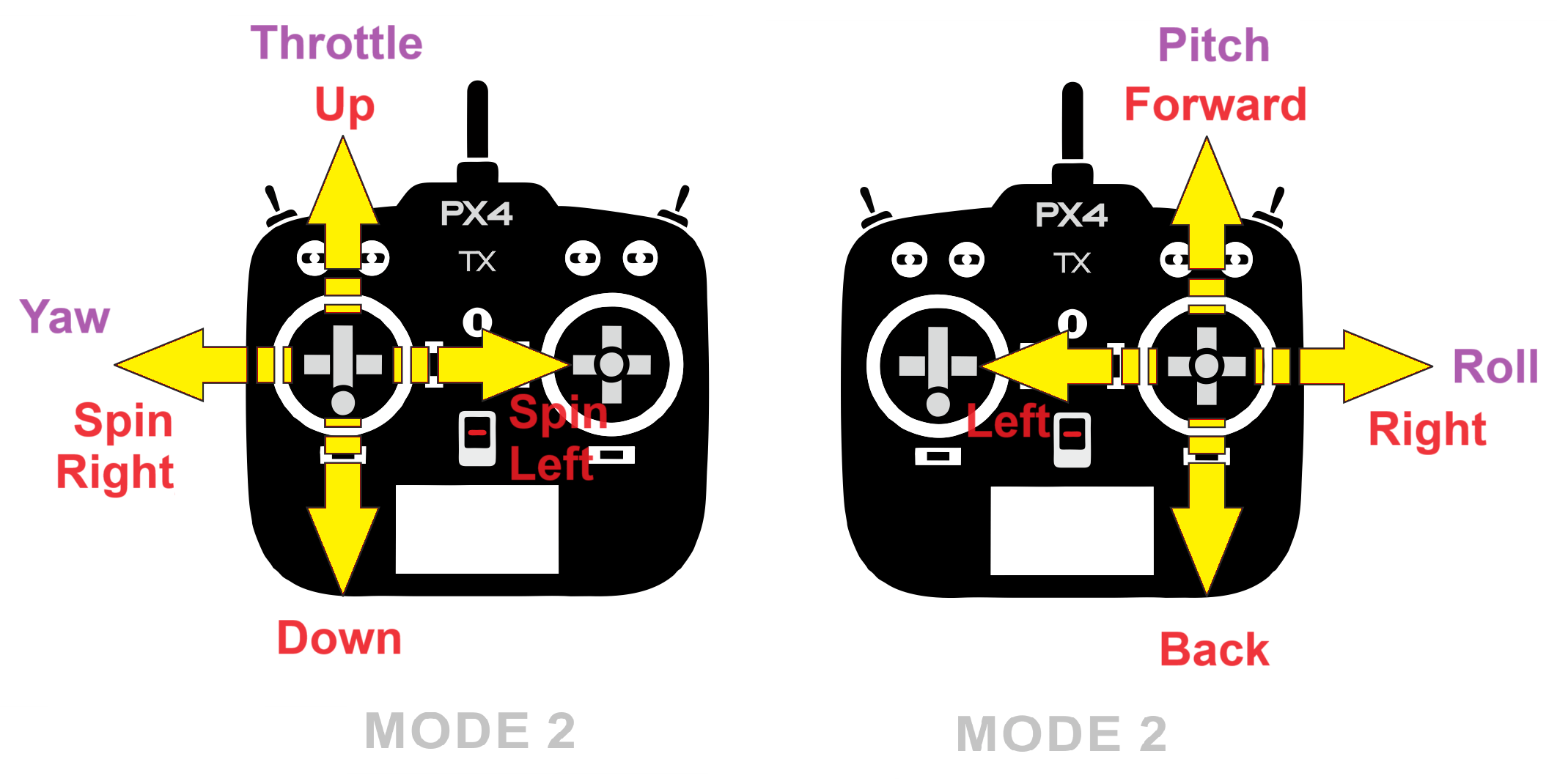
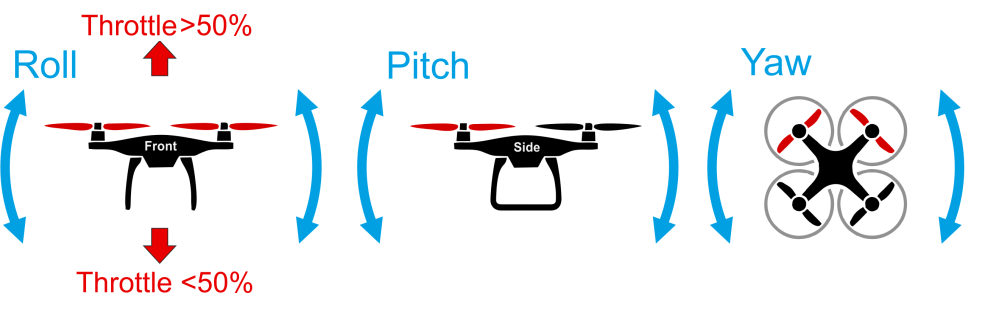
飞行器的运动通过四个基本指令控制:横滚、偏航、俯仰和油门。随着油门增加,旋翼旋转加快,飞行器上升;如果飞行器向前俯仰,部分升力将推动飞行器向前;如果向左右横滚,部分升力将使飞行器左右移动;而改变偏航则使飞行器在地面平面上绕自身轴旋转。
因此,这些指令分别允许你向左/右移动、向左/右旋转、向前/后移动以及向上/下移动,如下面的2 型模式(Mode 2)遥控器所示。
辅助飞行
即使了解了飞行器的控制原理,在完全手动模式下飞行也可能具有一定难度。新用户应配置遥控器,使用自动驾驶可自动补偿不稳定用户输入或环境因素的飞行模式。
强烈推荐新用户使用以下三种模式:
- 位置模式(Position mode) - 松开摇杆后,飞行器将停止移动(并能抵抗风飘移保持位置)。
- 高度模式(Altitude mode) - 爬升和下降的速率受到最大限制。
- 稳定模式(Stabilized mode) - 飞行器不易翻转,松开摇杆后会自动恢复水平(但不会保持位置)。
INFO
你也可以在QGroundControl主飞行界面上启用自动模式。