空速传感器
对于固定翼和垂直起降飞行器,强烈推荐使用空速传感器。它们至关重要,因为自动驾驶仪没有其他方法来检测失速。对于固定翼飞行来说,保证升力的是空速,而非地速!
硬件选型
推荐的数字空速传感器包括:
- 基于皮托管原理:
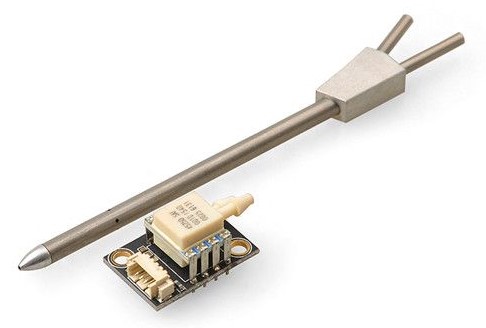
- 基于文丘里效应:
- TFSLOT文丘里效应空速传感器。
上述所有传感器均通过I2C总线/端口连接。
INFO
此外,Avionics Anonymous大气数据计算机可连接到CAN总线,不仅能测定高精度空速,还能通过板载气压计和外界大气温度探头测定真实静压和大气温度。
配置
启用空速传感器
空速传感器驱动不会自动启动。需使用其相应参数来启用每种类型的传感器:
- Sensirion SDP3X:SENS_EN_SDP3X
- TE MS4525:SENS_EN_MS4525DO
- TE MS5525:SENS_EN_MS5525DS
- Eagle Tree空速传感器:SENS_EN_ETSASPD
你还应检查ASPD_PRIMARY是否为1(见下一节,这是默认值)。
多个空速传感器
WARNING
实验性内容 使用多个空速传感器属于实验性操作。
如果你有多个空速传感器,可以使用ASPD_PRIMARY选择哪个传感器作为首选的主要数据源,其中1、2和3反映空速传感器启动的顺序:
0:合成空速估算值(地速减去风速)1:第一个启动的空速传感器(默认)2:第二个启动的空速传感器3:第三个启动的空速传感器
空速选择器首先会验证指定的传感器,只有在指定传感器的空速检查失败时,才会 fallback 到其他传感器(ASPD_DO_CHECKS用于配置检查项)。
然后,选定的传感器用于向估计器(EKF2)提供数据以及给控制器提供数据。
传感器特定配置
除了启用传感器外,通常无需进行特定于传感器的配置。如果有需要,相关内容应在相应的传感器页面中说明(例如TFSLOT > 配置)。
对于没有单独页面的传感器,其特定配置如下:
- Sensirion SDP3X:CAL_AIR_CMODEL(提供所需设置的概述)、CAL_AIR_TUBED_MM、CAL_AIR_TUBELEN。
校准
应按照以下说明校准空速传感器:基本配置 > 空速。