Holybro X500与Pixhawk4组装指南
INFO
Holybro最初为该套件配备Holybro Pixhawk 4,但撰写本文时,已升级为Holybro Pixhawk 6C。此组装记录仍具参考价值,因套件组装过程基本相同,且飞行控制器升级后可能依旧如此。
本主题提供使用 QGroundControl 组装套件与配置PX4的完整说明。
关键信息
- 完整套件:Holybro X500套件
- 飞行控制器:Pixhawk 4
- 组装时间(约):3.75小时(机架组装180分钟,自动驾驶仪安装/配置45分钟)

物料清单
Holybro的X500套件几乎包含所有所需组件:
- Pixhawk 4自动驾驶仪
- Holybro M8N GPS
- 电源管理 - PM07
- Holybro电机 - 2216 KV880 x4(已更新,查看备件清单了解当前版本)
- Holybro BLHeli S 20A电调 x4(已更新,查看备件清单了解当前版本)
- 螺旋桨 - 1045 x4(已更新,查看备件清单了解当前版本)
- 电池绑带
- 电源和无线电电缆
- 轴距 - 500毫米
- 尺寸 - 410x410x300毫米
- 433 MHz / 915 MHz Holybro遥测电台
此外,若想手动控制无人机,还需电池和接收器(兼容无线电系统)。
硬件
本节列出机架与自动驾驶仪安装所需的所有硬件。
机架硬件
| 物品 | 描述 | 数量 |
|---|---|---|
| 底板 | 碳纤维(2毫米厚) | 1 |
| 顶板 | 碳纤维(1.5毫米厚) | 1 |
| 机臂 | 碳纤维管(直径:16毫米,长度:200毫米) | 4 |
| 起落架 - 垂直杆 | 碳纤维管 + 工程塑料 | 2 |
| 起落架 - 横杆 | 碳纤维管 + 工程塑料 + 泡沫 | 2 |
| 电机底座 | 由6个部件、4颗螺丝和4颗螺母组成 | 4 |
| 滑杆 | 直径:10毫米,长度:250毫米 | 2 |
| 电池安装板 | 厚度:2毫米 | 1 |
| 电池垫 | 3毫米黑色硅胶片 | 1 |
| 平台板 | 厚度:2毫米 | 1 |
| 吊架及橡胶圈垫片 | 内孔直径:10毫米,黑色 | 8 |

电子设备
| 物品描述 | 数量 |
|---|---|
| Pixhawk4及各种线缆 | 1 |
| Pixhawk4 GPS模块 | 1 |
| 电源管理PM07(已预焊接电调电源线) | 1 |
| 电机2216 KV880(V2更新款) | 4 |
| Holybro BLHeli S 20A电调 x4 | 1 |
| 433 MHz / 915 MHz Holybro遥测电台 | 1 |
所需工具
本次组装使用以下工具:
- 1.5毫米内六角螺丝刀
- 2.0毫米内六角螺丝刀
- 2.5毫米内六角螺丝刀
- 3毫米十字螺丝刀
- 5.5毫米套筒扳手或小钳子
- 剪线钳
- 精密镊子
组装
预计组装时间为3.75小时(机架组装180分钟,自动驾驶仪安装/配置45分钟)
- 首先组装起落架。拧松起落架螺丝,插入垂直杆(如图1和图2所示)。

图2:起落架组件

图2:已组装好的起落架 2. 接着将4根机臂穿过图3所示的4个电机底座。确保机臂杆稍伸出底座,且4根机臂伸出量一致,并保证电机线朝外。
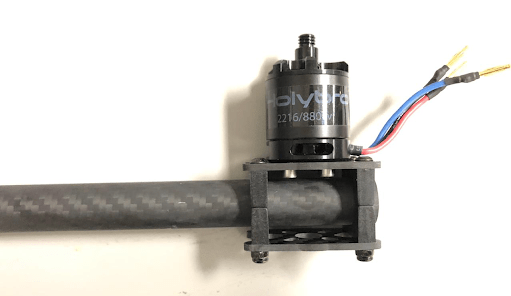
图3:将机臂连接到电机底座 3. 插入4颗尼龙螺丝和尼龙柱,用4颗尼龙螺母将电源模块PM07连接到底板,如图4所示。
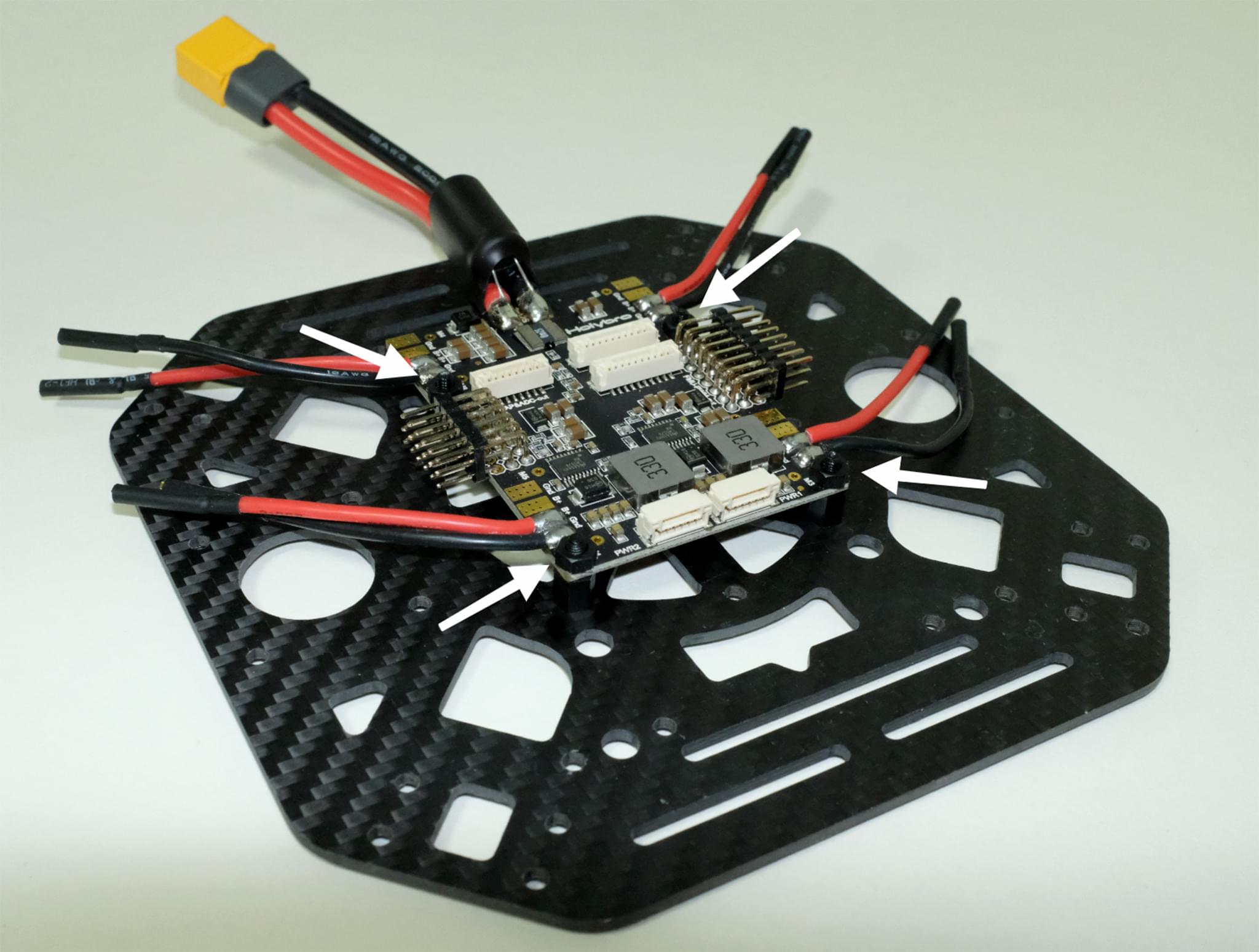
图4:连接电源模块 4. 将4个电机的电调线穿过各机臂,将三线端连接到电机,如图5所示。

图5:连接电机 5. 将电调电源线连接到电源模块PM07,黑色接黑色,红色接红色,电调PWM信号线连接到“FMU - PWM - Out”。确保按正确顺序连接电机电调PWM线。参考图7中机架电机编号,连接到PM07板上相应编号。
 图7:电调、电源模块及信号线布线
图7:电调、电源模块及信号线布线
电机顶部颜色表示旋转方向(图7 - 1),黑色尖端为顺时针,白色尖端为逆时针。确保遵循PX4四旋翼X型机架的电机方向参考(图7 - 2)。

图7:电机顺序/方向示意图

图7 - 1:电机方向 6. 将10针电缆连接到FMU - PWM - in,6针电缆连接到PM07电源模块的PWR1。
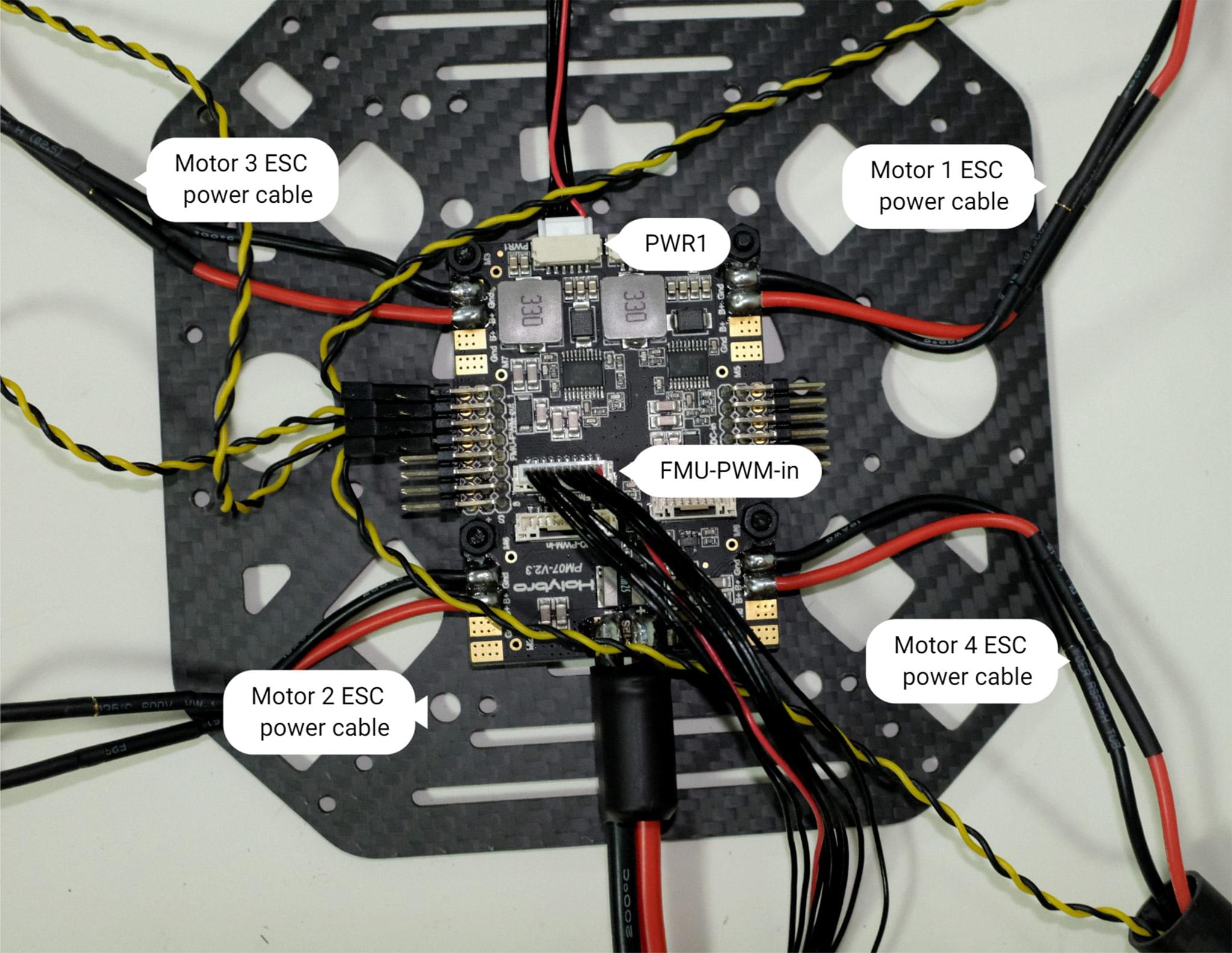
图8:电源模块PWM及电源布线 7. 若要将GPS安装在顶板上,可用4颗螺丝和螺母将GPS支架固定在顶板上。

图9:将GPS支架固定在顶板上 8. 将PM07电缆穿过顶板。用4个U形尼龙扎带、螺丝和螺母连接顶板与底板,每侧都连接,确保电机电调电缆在U形尼龙扎带内,如图10所示,螺母先不拧紧。

图10 - 1:将电源模块电缆穿过顶板

图10 - 2:连接顶板和底板 9. 将机臂管往机架内推一点,确保4根机臂的伸出量(图11中红色方块处)一致。确保所有电机垂直向上,然后拧紧所有螺母和螺丝。
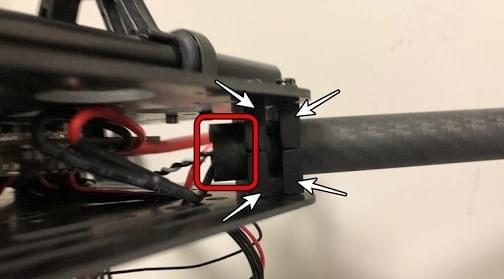 10. 将吊架垫片放入4个吊架,用8颗六角螺丝将吊架安装到底板上(图11)。螺丝孔位置如图12中白色箭头所示。建议将无人机倾斜,便于安装。
10. 将吊架垫片放入4个吊架,用8颗六角螺丝将吊架安装到底板上(图11)。螺丝孔位置如图12中白色箭头所示。建议将无人机倾斜,便于安装。

图11:吊架垫片
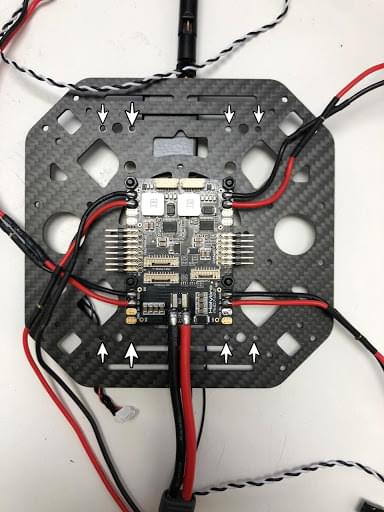
图12:螺丝孔 11. 将滑杆插入吊架环(图13)。组装电池支架和平台板,并安装在滑杆上,如图14所示。

图13:滑杆

图14:滑杆上的电池支架 12. 将起落架安装到底板。建议将无人机倾斜,方便安装。

图15:起落架 13. 用胶带将GPS粘贴到GPS桅杆顶部,安装GPS桅杆。确保GPS上箭头指向前方(图16)。

图16:GPS和桅杆 14. 将遥测电台安装在顶板。将遥测电缆插入飞行控制器的“TELEM1”端口,GPS模块插入“GPS MODULE”端口。将PM07的“FMU - PWM - in”电缆连接到飞行控制器的“I/O - PWM - out”,PM07的“PWR1”连接到飞行控制器的“POWER1”,如图17所示。
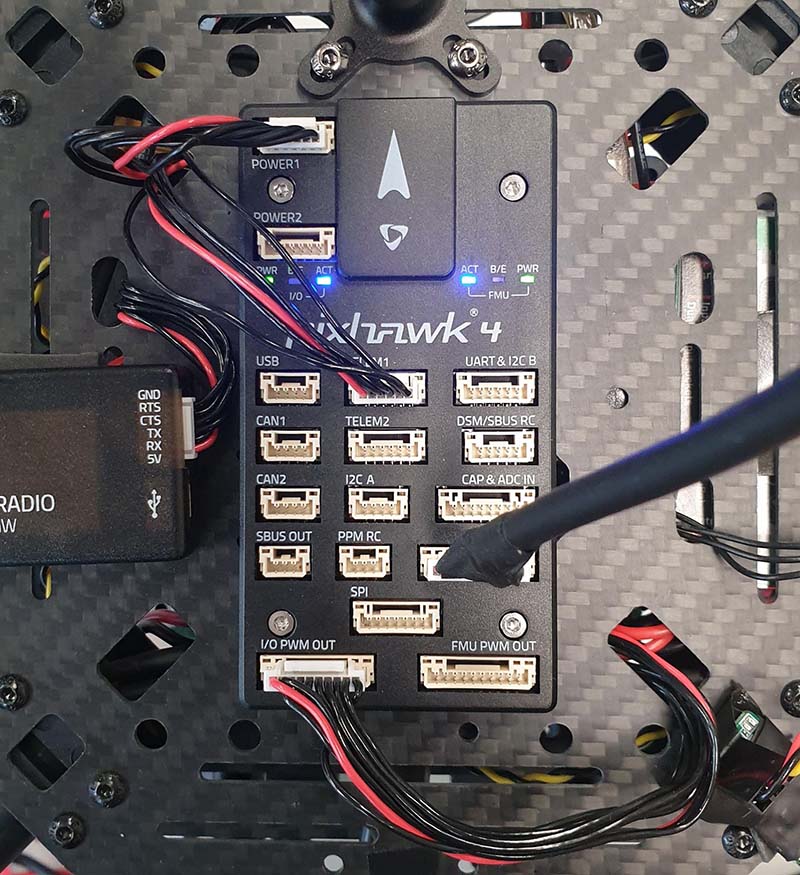
图17:安装遥测电台/将PWM和电源电缆连接到飞行控制器
更多信息请参考Pixhawk 4快速入门。
至此,组装完成。完全组装好的套件如下图所示:

PX4配置
TIP
安装和配置PX4的完整说明见基础配置。
使用 QGroundControl 安装PX4自动驾驶仪,并针对X500机架进行配置和调校。根据你的平台下载并安装 QGroundControl。
首先更新固件、机架和执行器映射:
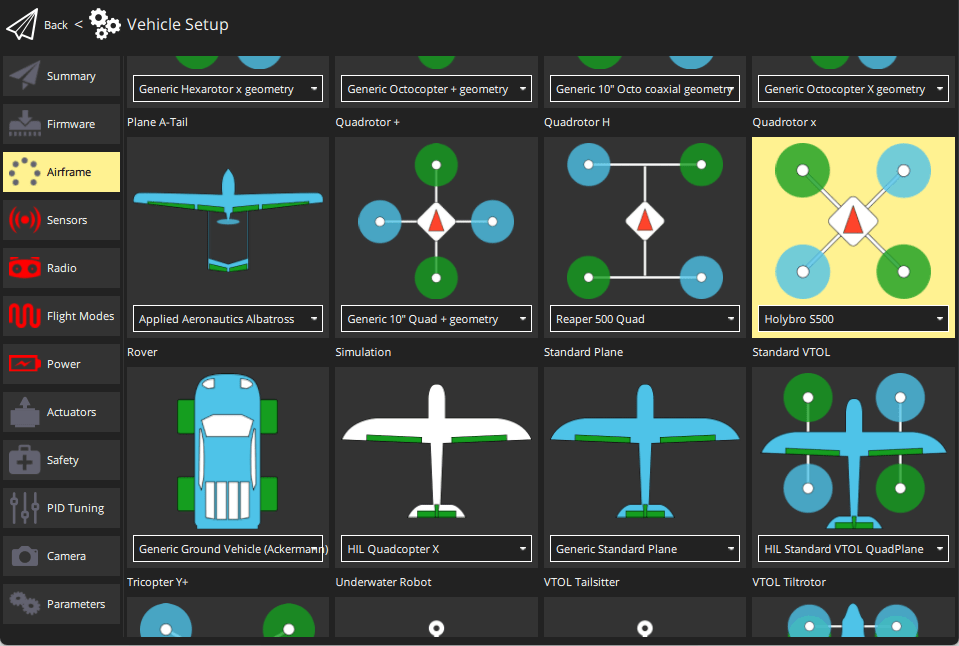
- 执行器
- 无需更新飞行器几何参数(因这是预配置机架)。
- 根据布线情况,将执行器功能分配到相应输出。
- 使用滑块测试配置。
然后进行必要的设置/校准:
理想情况下,还应进行:
调试
机架选择会为该机架设置自动驾驶仪的默认参数。这些参数足以实现飞行,但针对特定机架组装进行参数调校是个不错的做法。
有关如何进行调校的说明,请从自动调校(多旋翼)开始阅读。
致谢
本组装记录由Dronecode试飞团队提供。