CUAV V5+自动驾驶仪
WARNING
PX4 并不生产此(或任何)自动驾驶仪。 若有硬件支持或合规性相关问题,请联系制造商。
V5+®是CUAV®生产的一款先进自动驾驶仪。 它由CUAV®与PX4团队合作设计。
这款自动驾驶仪推荐用于商业系统集成,同时也适用于学术研究及其他用途。
其一些主要特性包括:
- 完全兼容Pixhawk项目的FMUv5设计标准,并对所有外部接口采用Pixhawk连接器标准。
- 相比FMU v3,拥有更先进的处理器、更大的随机存取存储器(RAM)和闪存,以及更稳定可靠的传感器。
- 固件与PX4兼容。
- 模块化设计,用户可定制自己的载板。
- 内置减振系统,具备高性能的减震能力。
- 多重冗余的传感器和电源系统,提升飞行安全性与稳定性。
INFO
此飞行控制器为制造商支持的产品。
总览
- 主处理器:STM32F765
- 32位Arm® Cortex® - M7,216MHz,2MB存储,512KB RAM
- IO处理器:STM32F100
- 32位Arm® Cortex® - M3,24MHz,8KB SRAM
- 内置传感器:
- 加速度计/陀螺仪:ICM - 20689
- 加速度计/陀螺仪:BMI055
- 磁力计:IST8310
- 气压计:MS5611
- 接口:
- 14路PWM输出(6路来自FMU,8路来自IO)
- FMU上有3个专用PWM/捕获输入
- CPPM专用的RC输入
- 用于Spektrum / DSM以及带模拟/PWM RSSI的S.Bus的专用遥控输入
- 电平/PWM RSSI输入
- S.BUS伺服输出
- 5个通用串行口
- 4路I2C总线
- 4路SPI总线
- 2条带串行电调(serial ESC)的CAN总线
- 2个电池电流/电压模拟输入口
- 电源系统:
- 输入电压:4.3 - 5.4V
- USB输入电压:4.75 - 5.25V
- 重量和尺寸:
- 重量:99克
- 尺寸:85.5×42×33mm
- 其它特性:
- 工作温度:-20 - 80°C(测量值)
购买渠道
INFO
购买自动驾驶仪时可能包含Neo GPS模块。
连接(布线)
针脚定义
从此处下载**V5+**针脚定义。
额定电压
V5+自动驾驶仪支持冗余电源——最多可使用三个电源:Power1、Power2和USB。 您必须至少为其中一个电源供电,否则飞行控制器将无电。
INFO
对于基于FMUv5并带有PX4IO模块的飞行控制器(V5+即属于此类),伺服电源轨仅由FMU监控。 它既不由FMU供电,也不向FMU供电。 不过,标记为 + 的引脚都是公共的,可以将一个电池降压模块(BEC)连接到任何一组伺服引脚,为伺服电源轨供电。
正常运行最大额定值
在这些条件下,所有电源将按以下顺序为系统供电:
Power1和Power2输入(4.3V至5.4V)USB输入(4.75V至5.25V)
过流保护
V5+在5伏外设和5伏高功率上设有过流保护,将电流限制在2.5A。 V5+还具备短路保护。
WARNING
多达2.5A的电流可输送到标记为引脚1的连接器(尽管这些连接器额定电流仅为1A)。
编译固件
TIP
大多数用户无需构建此固件! 当连接适当硬件时,它已预先构建并由_QGroundControl_自动安装。
要为该目标构建PX4,请执行:
make px4_fmu-v5_default调试接口
PX4系统控制台和SWD接口在FMU调试端口(DSU7)上运行。 该板没有I/O调试接口。

调试端口(DSU7)使用JST BM06B连接器,引脚排列如下:
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | 5V+ | +5V |
| 2 | DEBUG TX (OUT) | +3.3V |
| 3 | DEBUG RX (IN) | +3.3V |
| 4(黑) | FMU_SWDIO | +3.3V |
| 6 | FMU_SWCLK | +3.3V |
| 6 | GND | GND |
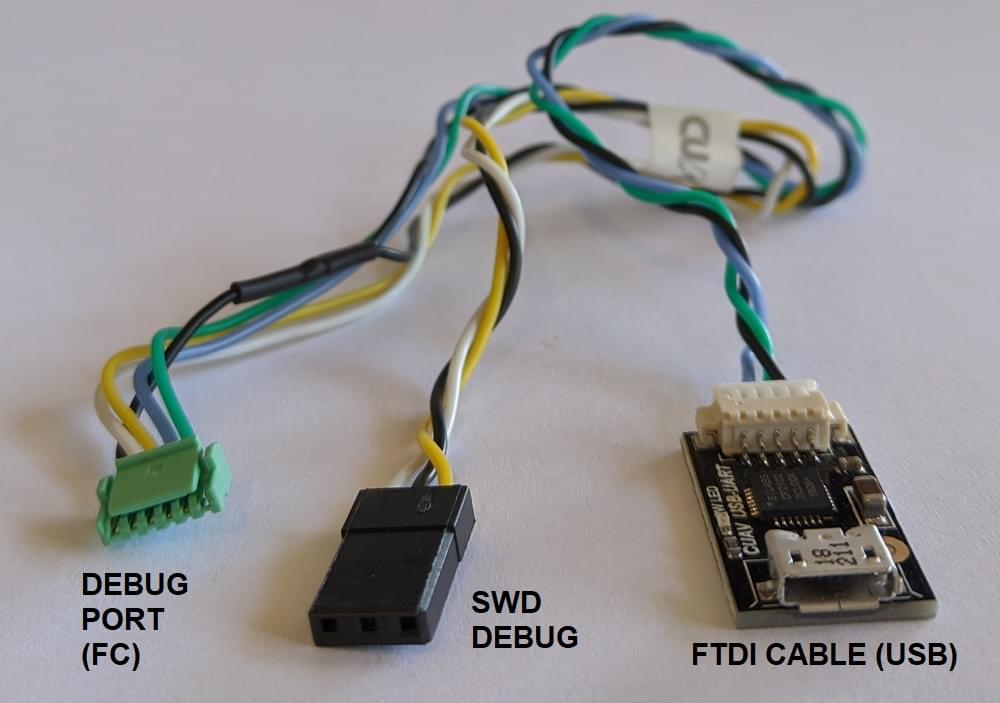
产品包装中包含一根便捷的调试电缆,可连接到DSU7端口。 该电缆分出一条FTDI电缆,用于将PX4系统控制台连接到计算机USB端口,以及用于SWD/JTAG调试的SWD引脚。 提供的调试电缆不连接到SWD端口的Vref引脚(1)。
WARNING
SWD Vref引脚(1)使用5V作为Vref,但CPU运行在3.3V!
一些JTAG适配器(SEGGER J - Link)会使用Vref电压来设置SWD线路上的电压。 对于直接连接到_Segger Jlink_,我们建议您使用标记为DSM/SBUS/RSSI的连接器引脚4上的3.3伏电压,为JTAG提供Vtref(即提供3.3V而非5V)。
更多信息请参见使用JTAG进行硬件调试。
串口映射
| UART | 设备 | 端口 |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1(带流控制) |
| USART3 | /dev/ttyS2 | TELEM2(带流控制) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX为来自SBUS_RC连接器的RC输入 |
| UART7 | /dev/ttyS5 | 调试控制台 |
| UART8 | /dev/ttyS6 | PX4IO |
外部设备
支持的平台/机身
任何可通过普通RC舵机或Futaba S - Bus舵机控制的多旋翼飞行器、飞机、漫游车或船只。 完整的支持配置集可在机身参考中查看。
备注
请勿将数字或模拟电源模块插接到为其他类型电源模块配置的连接器上
如果将模拟电源模块插入数字电源模块连接器,会导致该总线上的所有I2C设备停止工作。 具体来说,由于竞争,这将导致GPS的指南针停止工作,长期来看还可能损坏FMU。
同样,将数字电源模块插入模拟连接器将无法工作,长期来看也可能损坏或毁坏电源模块。
兼容性
CUAV采用了一些差异化设计,与部分硬件不兼容,以下将进行说明。
GPS与其他设备不兼容
推荐与CUAV V5+和CUAV V5 nano配合使用的_Neo v2.0 GPS_与其他Pixhawk飞行控制器不完全兼容(具体而言,蜂鸣器部分不兼容,并且安全开关可能存在问题)。
也可以使用UAVCAN NEO V2 PRO GNSS接收器,它与其他飞行控制器兼容。
使用JTAG进行硬件调试
DSU7 FMU调试引脚1为5伏——而非CPU的3.3伏。
一些JTAG在与目标通信时,会使用该电压来设置IO电平。
对于直接连接到_Segger Jlink_,我们建议您使用DSM/SBUS/RSSI引脚4的3.3伏电压作为调试连接器上的引脚1(Vtref)。
已知的问题
以下问题涉及首次出现的批次号。 批次号是V01后面的四位生产日期,显示在飞行控制器侧面的标签上。 例如,序列号Batch V011904(V01是V5的编号,1904是生产日期,即批次号)。
SBUS / DSM / RSSI接口引脚1未熔断
WARNING
这是一个安全问题。
请勿在SBUS / DSM / RSSI接口上连接其他设备(遥控接收器除外),这可能导致设备损坏。
- 发现批次:V01190904xxxx批次
- 修复批次:V01190904xxxx之后的批次