飞控方向的高级调参
方向和水平可以用参数手动调整,以校正传感器板的小误差或者校准误差。
如果存在持续的漂移偏差(通常出现在多电机中,但不限于此),那么在这些微调偏移角度参数的帮助下对其进行微调是一种很好的策略,而不是使用RC发射机的微调器。 对于基本设置,请遵循下面链接的说明:
INFO
这些说明是“高级”的,不建议普通用户使用(广泛的调整通常就足够了)。
方向参数设置
The SENS_BOARD_ROT 参数定义了飞行控制器板相对于飞行器框架的旋转,而微调偏移 (SENS_BOARD_X_OFF, SENS_BOARD_Y_OFF, SENS_BOARD_Z_OFF) 设置传感器相对于板本身的旋转。 The fine tuning offsets are added to the SENS_BOARD_ROT 以确定飞行控制器偏航、俯仰和横滚方向的总偏移角度。
First perform the normal calibration for Flight Controller Orientation and Level Horizon Calibration to set the SENS_BOARD_ROT parameter.
然后可以设置其他参数,以微调IMU传感器相对于板本身的方向。
您可以在QGroundControl中找到参数,如下所示:
正常开放: Settings > Parameters > Sensor Calibration.
参数位于下面所示的部分中(或者您可以搜索它们):
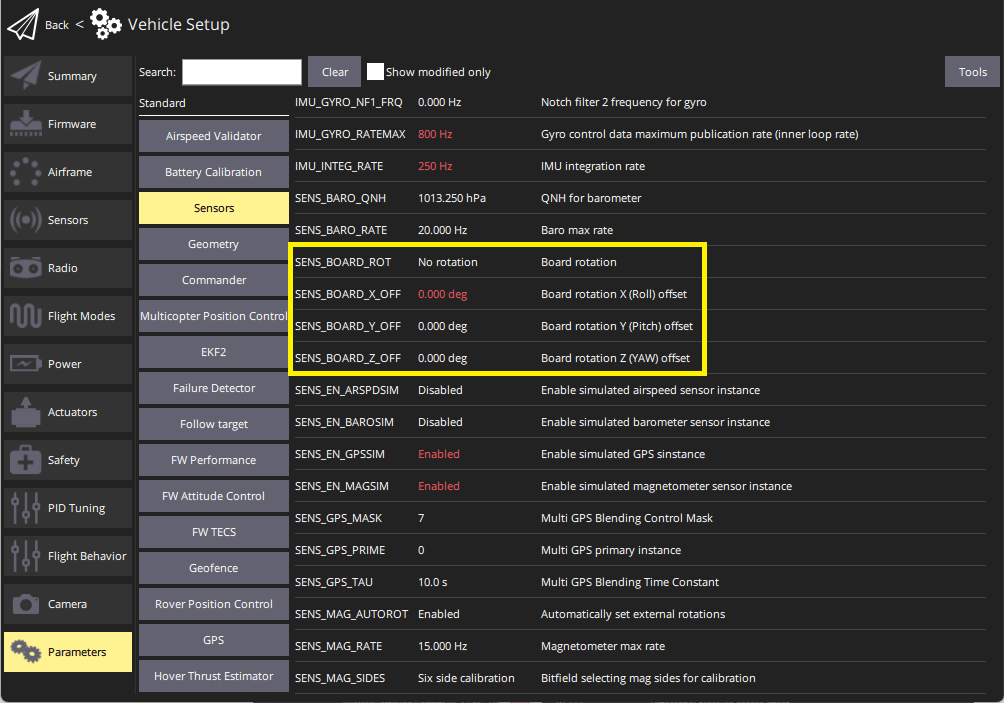
Parameter Summary
- SENS_BOARD_ROT: Rotation of the FMU board relative to the vehicle frame.
- SENS_BOARD_X_OFF: Rotation, in degrees, around PX4FMU's X axis or Roll axis. Positive angles increase in CCW direction, negative angles increase in CW direction.
- SENS_BOARD_Y_OFF: Rotation, in degrees, around PX4FMU's Y axis or Pitch axis. Positive angles increase in CCW direction, negative angles increase in CW direction.
- SENS_BOARD_Z_OFF: Rotation, in degrees, around PX4FMU's Z axis Yaw axis. Positive angles increase in CCW direction, negative angles increase in CW direction.