ModalAI VOXL Flight
PX4 v1.11WARNING
PX4 并不生产此款(或任何一款)自动驾驶仪。 如需硬件支持或解决合规性问题,请联系制造商。
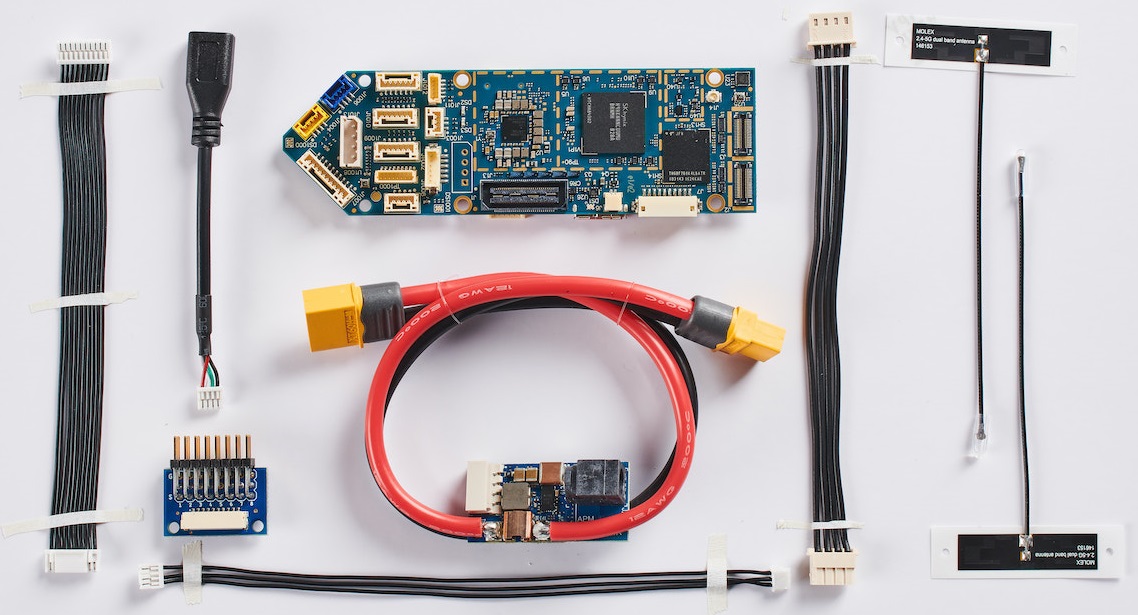
ModalAI的VOXL Flight(数据手册)是首批将骁龙芯片的强大性能与复杂性,同基于STM32F7的PX4的灵活性和易用性相结合的计算平台之一。 VOXL Flight 由美国制造,在一块印刷电路板上集成了PX4飞行控制器,支持避障和无GPS(室内)导航功能。
INFO
该飞行控制器获得制造商支持。
产品规格
系统
| 特性 | 详情 |
|---|---|
| 重量 | 26克 |
伴侣计算机
| 特性 | 详情 |
|---|---|
| 基础操作系统 | 基于Linux Yocto Jethro,内核版本3.18。通过在VOXL上运行Docker,还可使用其他Linux操作系统,详情见此处 |
| 计算能力 | 高通骁龙821,搭配4GB LPDDR4 1866MHz内存,骁龙821 数据手册,文档 |
| CPU | 四核CPU,主频高达2.15GHz |
| GPU | Adreno 530 GPU,频率624MHz |
| 计算数字信号处理器(DSP) | Hexagon计算DSP(cDSP),825MHz |
| 传感器DSP | Hexagon传感器DSP(sDSP),700MHz |
| 视频 | 支持4K30视频采集,h.264/5编码,搭配720p的第一人称视角(FPV) |
| 相机接口 | 支持MIPI - CSI2、USB UVC、HDMI接口 |
| 无线网络(Wi - Fi) | 预认证的Wi - Fi模块QCNFA324,FCC ID:PPD - QCNFA324,QCA6174A调制解调器,802.11ac 2x2双频,蓝牙4.2(双模) |
| 4G长期演进技术(LTE) | 可选附加模块 |
| Microhard pDDL | 可选附加模块 |
| 全球导航卫星系统(GNSS) | WGR7640,10Hz |
| 输入/输出(I/O) | 1个USB3.0 OTG(ADB端口),1个USB2.0(扩展端口),2个通用异步收发传输器(UART),3个集成电路总线(I2C),可配置额外的通用输入输出(GPIO)和串行外设接口(SPI) |
| 存储 | 32GB(UFS 2.0),支持微型SD卡 |
| 软件 | Docker、OpenCV 2.4.11、3.4.6、4.2,机器人操作系统(ROS)Indigo,高通机器视觉SDK,更多开源示例见GitLab |
| 惯性测量单元(IMUs) | ICM - 42688(SPI10),ICM - 20948(SPI1) |
| 气压计 | BMP280 |
飞行控制器
| 特性 | 详情 |
|---|---|
| MCU | 216MHz,32位ARM M7 STM32F765II |
| 内存 | 256Kb铁电随机存取存储器(FRAM) |
| 2Mbit闪存 | |
| 512Kbit静态随机存取存储器(SRAM) | |
| 固件 | PX4 |
| IMUs | [ICM - 20602][icm - 20602](SPI1) |
| ICM - 42688(SPI2) | |
| BMI088(SPI6) | |
| 气压计 | BMP388(I2C4) |
| 安全元件 | A71CH(I2C4) |
| 微型SD卡 | [支持的存储卡信息](../dev_log/logging.md#sd - cards) |
| 输入 | 全球定位系统(GPS)/磁力计 |
| Spektrum接收机信号 | |
| 遥测信号 | |
| 控制器局域网(CAN)总线 | |
| 脉位调制(PPM)信号 | |
| 输出 | 6个发光二极管(2组RGB) |
| 8个脉宽调制(PWM)通道 | |
| 额外接口 | 3个串行端口 |
| I2C | |
| GPIO |
INFO
更详细的硬件文档可在此处找到。
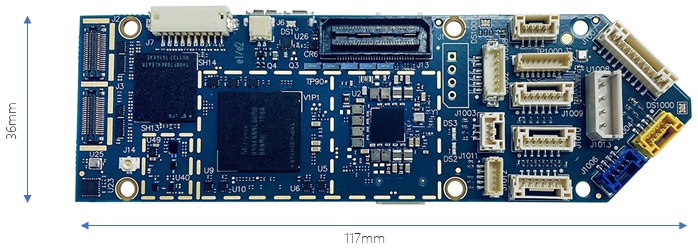
尺寸
PX4固件兼容性
“VOXL Flight”与PX4 v1.11及之后版本的官方PX4固件完全兼容。
ModalAI为PX4 v1.11维护了一个分支版本的PX4。 其中包括对UART电调(ESC)的支持,以及视觉惯性里程计(VIO)和视觉避障(VOA)方面的改进,这些改进计划将被合并到主分支。
关于该固件的更多信息可在此处找到。
QGroundControl支持情况
此板在QGroundControl 4.0及更高版本中得到支持。
访问链接
- VOXL Flight完整套件
- VOXL Flight板卡(仅板卡)
- 集成避障摄像头的VOXL Flight(VOXL飞行甲板)(数据手册)
- 集成在可直接飞行的VOXL m500开发无人机中的VOXL Flight(数据手册)
快速入门
供应商提供的快速入门指南位于此处。
voxl - vision - px4
VOXL Flight在硬件的伴侣计算机部分运行voxl - vision - px4,它起到一种MAVLink代理的作用。 如需详细信息,源代码可在此处获取。
连接器
有关引脚分配的详细信息可在此处找到。
顶部
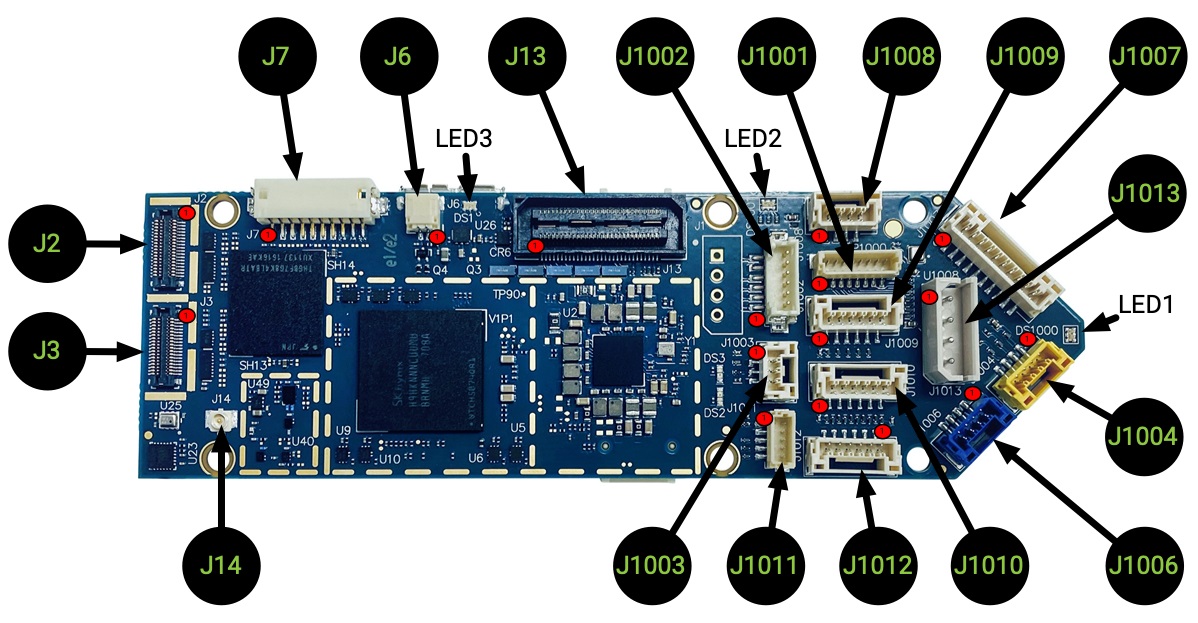
注意:1000系列连接器可从STM32/PX4访问
| 连接器 | 概要 | 使用方 |
|---|---|---|
| J2 | 高分辨率4K图像传感器(CSI0) | 骁龙 - Linux操作系统 |
| J3 | 立体图像传感器(CSI1) | 骁龙 - Linux操作系统 |
| J6 | 散热风扇连接器 | 骁龙 - Linux操作系统 |
| J7 | BLSP6(GPIO)和BLSP9(UART) | 骁龙 - Linux操作系统 |
| J13 | 扩展板对板连接器 | 骁龙 - Linux操作系统 |
| J14 | 集成GNSS天线连接口 | 骁龙 - Linux操作系统 |
| J1001 | 编程与调试/UART3 | STM32 - PX4飞行控制器 |
| J1002 | UART电调(ESC),UART2/TELEM3 | STM32 - PX4飞行控制器 |
| J1003 | PPM遥控信号输入 | STM32 - PX4飞行控制器 |
| J1004 | 遥控输入,Spektrum/SBus/UART6 | STM32 - PX4飞行控制器 |
| J1006 | USB 2.0连接器(PX4/QGroundControl) | STM32 - PX4飞行控制器 |
| J1007 | 8通道PWM/DShot输出 | STM32 - PX4飞行控制器 |
| J1008 | CAN总线 | STM32 - PX4飞行控制器 |
| J1009 | I2C3,UART4 | STM32 - PX4飞行控制器 |
| J1010 | 遥测(TELEM1) | STM32 - PX4飞行控制器 |
| J1011 | I2C2,安全按钮输入 | STM32 - PX4飞行控制器 |
| J1012 | 外部GPS和磁力计,UART1,I2C1 | STM32 - PX4飞行控制器 |
| J1013 | 电源输入,I2C3 | STM32 - PX4飞行控制器(为整个系统供电) |
底部
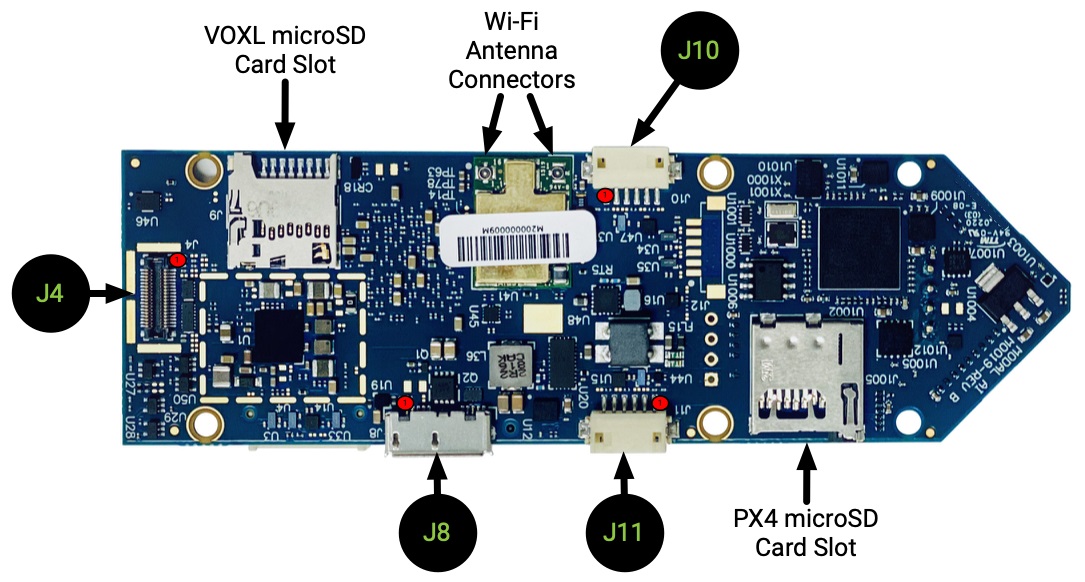
注意:1000系列连接器可从STM32/PX4访问
| 连接器 | 概要 | 使用方 |
|---|---|---|
| J4 | 跟踪/光流图像传感器(CSI2) | 骁龙 - Linux操作系统 |
| J8 | USB 3.0 OTG | 骁龙 - Linux操作系统,adb |
| J10 | BLSP7 UART和I2C扩展接口 | 骁龙 - Linux操作系统 |
| J11 | BLSP12 UART和I2C扩展接口 | 骁龙 - Linux操作系统 |
| VOXL微型SD卡 | 骁龙 - Linux操作系统 | |
| PX4微型SD卡 | 最大32Gb | STM32 - PX4飞行控制器 |
| Wi - Fi天线 | 内置 | 骁龙 - Linux操作系统 |
用户指南
完整的用户指南可在此处获取。
如何构建
要为该目标构建PX4,请执行以下命令:
make modalai_fc - v1串口映射
注意:以下显示的映射仅针对PX4控制的接口
| 通用异步收发传输器(UART) | 设备 | 端口 |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1(J1012) |
| USART2 | /dev/ttyS1 | TELEM3(J1002) |
| USART3 | /dev/ttyS2 | 调试控制台(J1001) |
| UART4 | /dev/ttyS3 | 扩展UART(J6) |
| UART5 | /dev/ttyS4 | PX4与伴侣计算机之间的UART |
| USART6 | /dev/ttyS5 | 遥控(J1004) |
| UART7 | /dev/ttyS6 | TELEM1(J1010) |
| UART8 | /dev/ttyS7 | 无 |
技术支持
如需更多信息,请访问ModalAI论坛。