MindRacer硬件
WARNING
PX4 不生产此(或任何)自动驾驶仪。 若需硬件支持或解决合规性问题,请联系制造商。
AirMind® 的 MindRacer 系列是面向微型无人机的全堆叠式飞行平台。该平台目前有两款成品飞行器:MindRacer 210 和 NanoMind 110。
INFO
此飞行控制器属于制造商支持类型。
总览
MindRacer是面向微型无人机的全堆叠式飞行平台。它基于 MindPX,在进一步缩小外形尺寸的同时,专注于提供模块化功能。MindRacer是一个平台,而非单纯的飞行控制器。
MindRacer引入了SEP(免焊接端口)和WEP(免布线协议)概念。在SEP和WEP出现之前,焊接和布线一直是无人机制造和调试过程中的主要难题,且效率低下。
INFO
主要硬件文档位于此处。
- 超小尺寸,重量约6克
- 高性能STM32F427 168MHz浮点处理器,油门响应超快
- 支持OneShot电调
- 支持PPM/SBUS/DSM无线电接收器,支持D.Port/S.Port/Wifi遥测
- 板载飞行数据记录器
- 支持IMU隔离
- 符合DroneCode®标准的连接器
| 项目 | 描述 |
|---|---|
| 飞行控制器/处理器 | F427VIT6 |
| 重量 | 约6克 |
| 尺寸 | 35x35mm |
| PWM输出 | 最多6个 |
| IMU | 10自由度 |
| IMU隔离 | 是/可选 |
| 无线电接收器 | S.BUS/PPM/DSM/DSM2/DSMX/SUMD |
| 遥测 | FrSky® D.Port、S.Port、Wifi、3DR电台 |
| 板载TF卡用于飞行数据记录 | 是 |
| 支持OneShot电调 | 是 |
| 扩展插槽 | 2x7(针)x2 |
| 板载实时时钟 | 是 |
| 连接器 | JST GH(符合DroneCode标准) |
快速入门
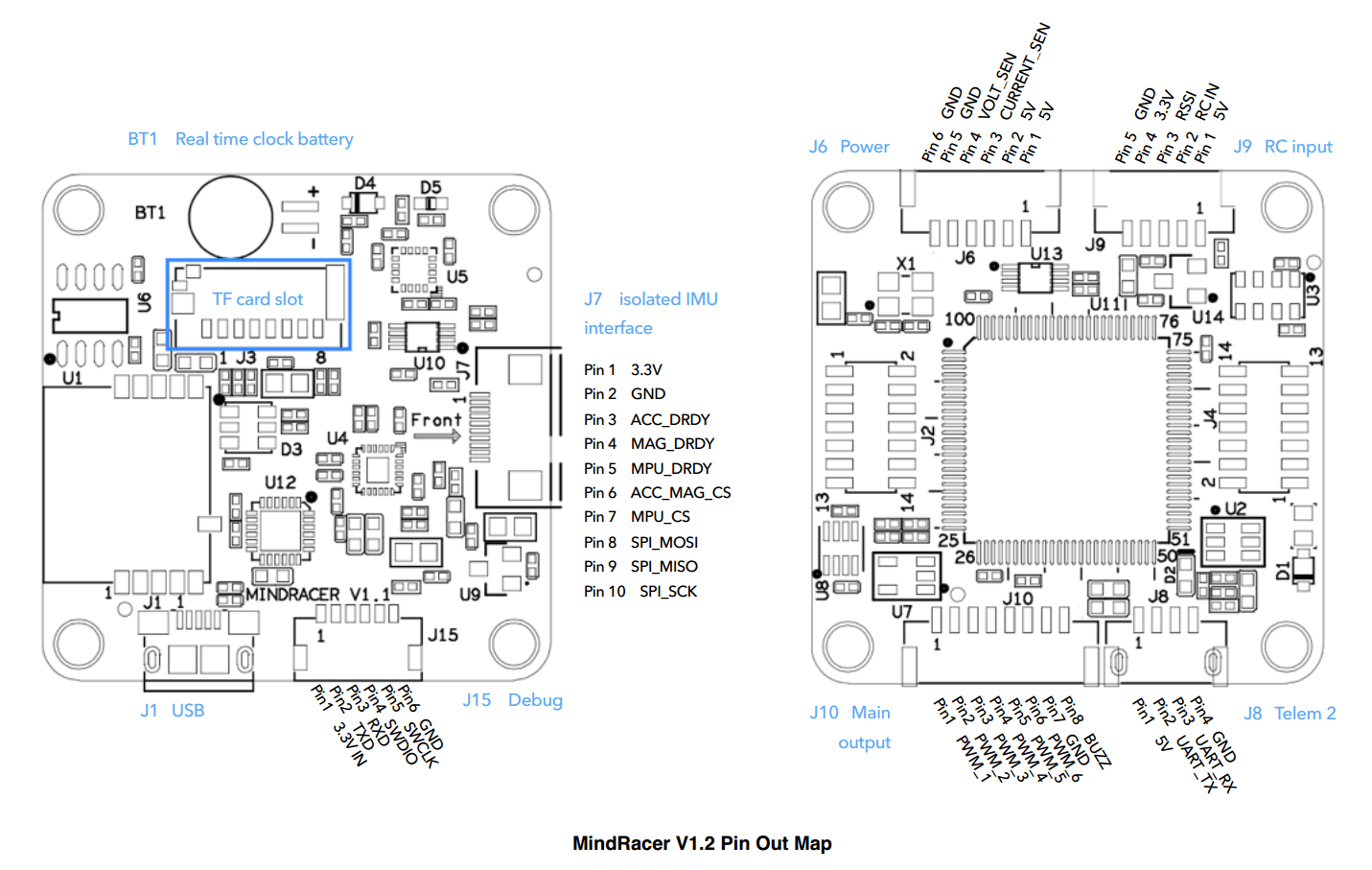
引脚映射图
如何构建
TIP
大多数用户无需构建此固件! 当连接适配硬件时,它已预先构建并由 QGroundControl 自动安装。
要为该目标构建PX4,请执行以下命令:
make airmind_mindpx-v2_default伴侣计算机连接
MindRacer配有一块适配IO板。
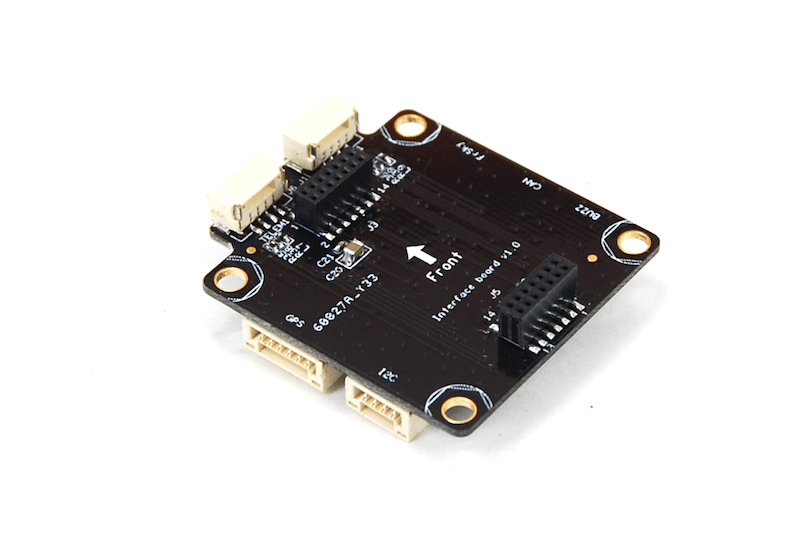
MindRacer内置UART转USB转换器。要连接伴侣计算机,将MindRacer堆叠在接口板上,然后将伴侣计算机连接到接口板上的USB端口。 其最大波特率与PX4系列相同,最高可达921600。
用户指南
INFO
用户指南位于此处
购买渠道
MindRacer可在AirMind商店购买。你也可以在亚马逊® 或eBay® 上找到MindRacer。
技术支持
如需更多信息,请访问http://www.mindpx.org 。 或者你可以发送电子邮件至support@mindpx.net 进行任何咨询或寻求帮助。