Holybro H - RTK ZED - F9P RTK移动站(DroneCAN版本)
H - RTK ZED - F9P移动站RTK GNSS是原版H - RTK F9P移动站的升级版本。
:::提示 本主题介绍该模块的DroneCAN版本。
该模块还有适配GPS1和GPS2 UART端口连接器的版本,其设置内容在RTK GNSS中有介绍。 :::
这款RTK GNSS配备了U - Blox ZED - F9P GNSS接收机、RM3100指南针以及一个三色LED指示灯,能够提供精确的定位和方向数据。DroneCAN版本还额外集成了微控制器(MCU)、惯性测量单元(IMU)和气压传感器。它具备IP66防护等级,适合在需要强大防尘防水功能的恶劣环境中使用。

该RTK GNSS具备多频段RTK功能,收敛时间短且性能稳定。它支持同时接收GPS(L1和L2)、GLONASS、伽利略和北斗信号,确保定位的可靠性和精确性。借助基站或NTRIP服务,它能实现厘米级定位精度。
高精度的PNI RM3100指南针确保了准确的方向和稳定性,可靠性极高,非常适合对性能要求严苛的无人机应用场景。它具有高分辨率、低功耗、强抗信号噪声能力、大动态范围和高采样率等特性。其测量结果在不同温度下都很稳定,并且不存在偏移漂移问题。
购买渠道
硬件规格
- 传感器
- Ublox ZED - F9P GPS
- 厘米级精度的RTK定位
- IP66防尘防水
- 电磁屏蔽,提升GNSS性能准确性
- 出厂即支持移动基线功能
- RM3100:高精度低噪声指南针
- Ublox ZED - F9P GPS
- DroneCAN传感器(DroneCAN版本中的额外传感器)
- MCU:STM32G4
- IMU:Invensense ICM - 42688
- 气压计:ICP20100
- 两个JST GH CAN连接器(通过转接线连接)
- LED指示灯:三色LED指示灯
- 关键规格
- 工作温度:-40°C至85°C
- 输入功率:4.75 - 5.25V
- 电流消耗:250 mA
- 重量:117克
硬件安装
布线
Holybro ZED - F9P GPS通过Pixhawk标准的4针JST GH线缆连接到CAN总线。更多信息,请参考CAN布线说明。
对于利用GPS航向的双F9P设置,需通过CAN或I2C扩展分配器或集线器将两个F9P的CAN连接器连接到同一总线上。
固件设置
Holybro ZED - F9P GPS板出厂时已预装“AP Periph”(Ardupilot DroneCAN固件)。
要将“AP Periph”固件更新到最新版本:
- 下载最新二进制文件。
- 使用以下任意一种方法更新固件:
- 使用ArduPilot:
- 在飞行控制器上安装 Ardupilot 固件,并在计算机上安装Mission Planner地面控制站软件。
- 按照DroneCAN固件升级指南中的说明更新二进制文件。
- 使用串口转CAN转换器(如Zubax Babel)和DroneCAN GUI工具。
- 使用ArduPilot:
之后请记得将飞行控制器的固件改回PX4。
启用DroneCAN
若要使用Holybro ZED - F9P GPS板,需将其连接到Pixhawk CAN总线,并通过将参数UAVCAN_ENABLE设置为2来进行动态节点分配(若使用DroneCAN电调,则设置为3),从而启用DroneCAN驱动程序。
具体步骤如下:
- 在 QGroundControl 中,将参数UAVCAN_ENABLE设置为
2或3,然后重启(参考查找/更新参数)。 - 将Holybro ZED - F9P GPS的CAN接口连接到Pixhawk的CAN接口。
启用后,该模块将在启动时被检测到,并由PX4分配一个动态节点ID。
PX4中DroneCAN的配置在DroneCAN > 启用DroneCAN中有更详细的说明。
传感器位置配置
- 对于单个移动站,应使用随附的桅杆安装该模块。
- 对于双ZED - F9P设置(移动基线),DroneCAN模块在机架上的间距应至少为30厘米,并且也要安装在桅杆上。可参考以下桅杆。
- F9P模块的箭头应与自动驾驶仪的方向一致指向前方。
双ZED - F9P DroneCAN模块用于航向测量
若要在PX4中使用双ZED - F9P GPS进行航向测量,请遵循以下步骤:
- 打开QGroundControl的参数页面。
- 在参数列表左侧,双击“系统”部分(这将隐藏该部分)。
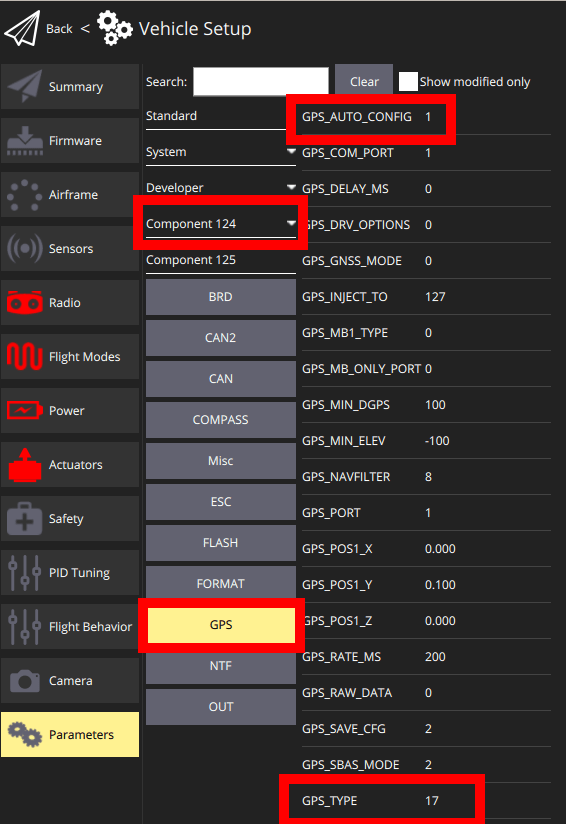
- 左侧面板应显示“组件”。点击映射到ZED - F9P DroneCAN节点的第一个
_Component_<ID#>(以下显示为“组件124”)。 - 点击“GPS”子部分,并配置以下列出的参数:
GPS_TYPE:设置为17表示移动基线的“基准站”,设置为18表示移动基线的“移动站”。其中一个F9P必须设为“移动站”,另一个必须设为“基准站”。GPS_AUTO_CONFIG:移动站和基准站均设置为1。GPS_POS_X、GPS_POS_Y、GPS_POS_Z:这是天线位置,对于F9P来说,天线位于模块内部。这是相对于自动驾驶仪的本地偏移(前右下方,FRD)。
然后,为了在DroneCAN中启用订阅,需启用以下PX4自动驾驶仪参数:
- UAVCAN_ENABLE:设置为
1以在PX4中启用DroneCAN。 - EKF2_GPS_CTRL:设置为
15以启用双天线航向测量。 - UAVCAN_SUB_GPS_R:设置为
1以启用对GNSS相对数据的订阅。 - EKF2_GPS_YAW_OFF:设置为与基准站和移动站方向对应的顺时针角度(度)(例如,当基准站在左、移动站在右时,设置为90度)。
一旦启用这些参数,并且F9P安装到机架上(假设RTK定位有效),两个F9P上的LED指示灯应变为绿色。
请注意,仅当至少有一个F9P报告状态为“RTK固定(6)”时,双F9P航向测量才准确有效。这意味着在室内或存在GPS干扰/信号覆盖不足的区域,双航向测量将无法工作。