mRo Pixracer 介绍
WARNING
PX4 不生产此(或任何)自动驾驶仪。 若需硬件支持或解决合规性问题,请联系制造商。
Pixhawk® XRacer 系列板卡专为小型竞速四轴飞行器和固定翼飞机优化设计。与 Pixfalcon 和 Pixhawk 相比,它内置了 WiFi 模块、配备新型传感器、设有便捷的全舵机接口、支持 CAN 总线,并且拥有 2M 的闪存。

TIP
此自动驾驶仪由 PX4 维护与测试团队提供支持。
主要特性
- 主片上系统:STM32F427VIT6 rev.3
- CPU:180 MHz 的 ARM Cortex® M4 内核,带有单精度浮点运算单元(FPU)
- 随机存取存储器(RAM):256 KB SRAM(L1)
- 标准 FPV 外形尺寸:36x36 毫米,标准孔距 30.5 毫米
- 传感器:Invensense® ICM - 20608 加速度计/陀螺仪(4 KHz)、MPU9250 加速度计/陀螺仪/磁力计(4 KHz)
- 磁力计:HMC5983 磁力计,带温度补偿
- 气压计:Measurement Specialties MS5611 气压计
- 连接器:JST GH 连接器
- 存储:微型 SD 卡(用于日志记录)
- 遥控输入:支持 Futaba S.BUS 和 S.BUS2、Spektrum DSM2 和 DSMX、Graupner SUMD、PPM 输入以及 Yuneec ST24
- 遥测端口:FrSky® 遥测端口
- PWM 输出:OneShot PWM 输出(可配置)
- 其他:可选配安全开关和蜂鸣器
购买渠道
可从 mRobotics.io 购买 Pixracer。 其配件包括:
套件内容
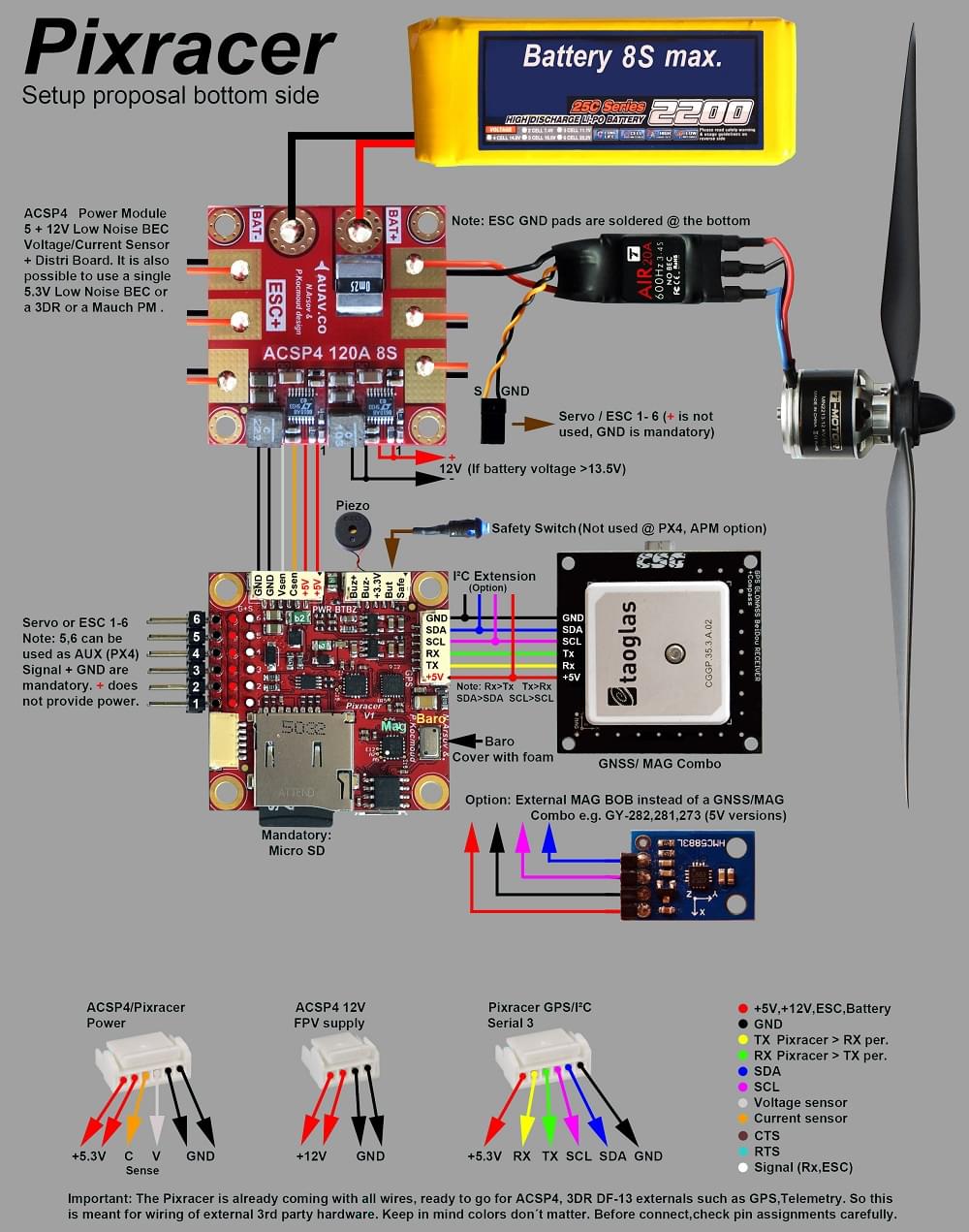
Pixracer 设计使用独立的航电电源,这是为了避免电机或电调产生的电流浪涌回流至飞行控制器,干扰其精密传感器。 套件包含:
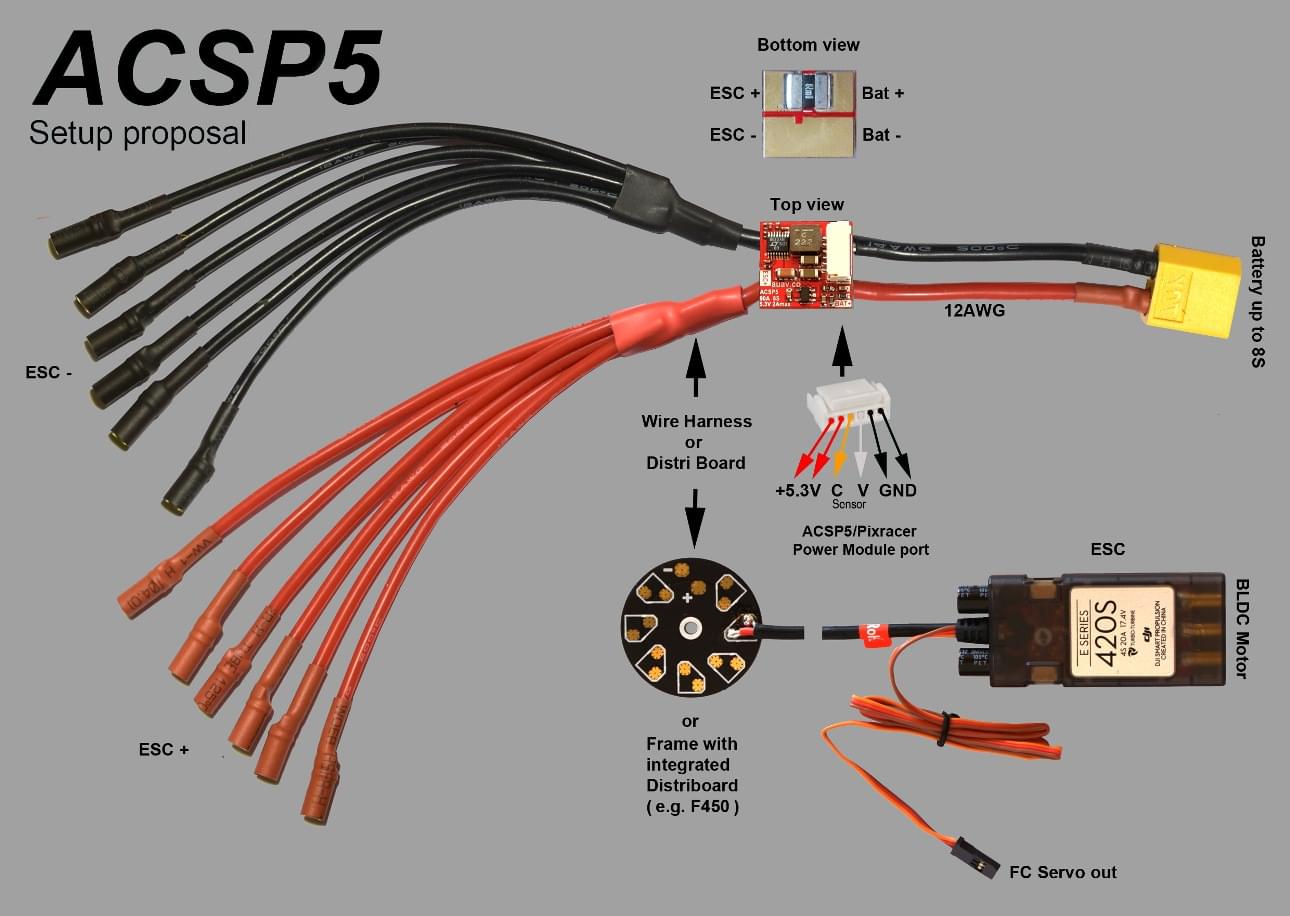
- 电源模块(带电压和电流感应功能)
- I2C 分配器(支持 AUAV、Hobbyking 和 3DR® 外设)
- 通用外设线缆套件
无线网络(无需 USB 连接)
该板卡的主要特性之一是能够通过 WiFi 进行新固件刷写、系统设置以及飞行中的遥测数据传输,这使得它无需依赖桌面系统。 相关组件包括:
INFO
目前暂不支持通过 WiFi 进行固件升级(默认引导加载程序支持,但尚未启用),系统设置和遥测功能已支持。
组装
请参考 Pixracer 接线快速入门。
接线图

INFO
如果使用 TELEM2 连接外部遥测模块,需要将其配置为 MAVLink 串口。 更多信息请参考:Pixracer 接线快速入门 > 外部遥测


连接器
所有连接器均遵循 Pixhawk 连接器标准。除非另有说明,所有连接器均为 JST GH 类型。
针脚定义

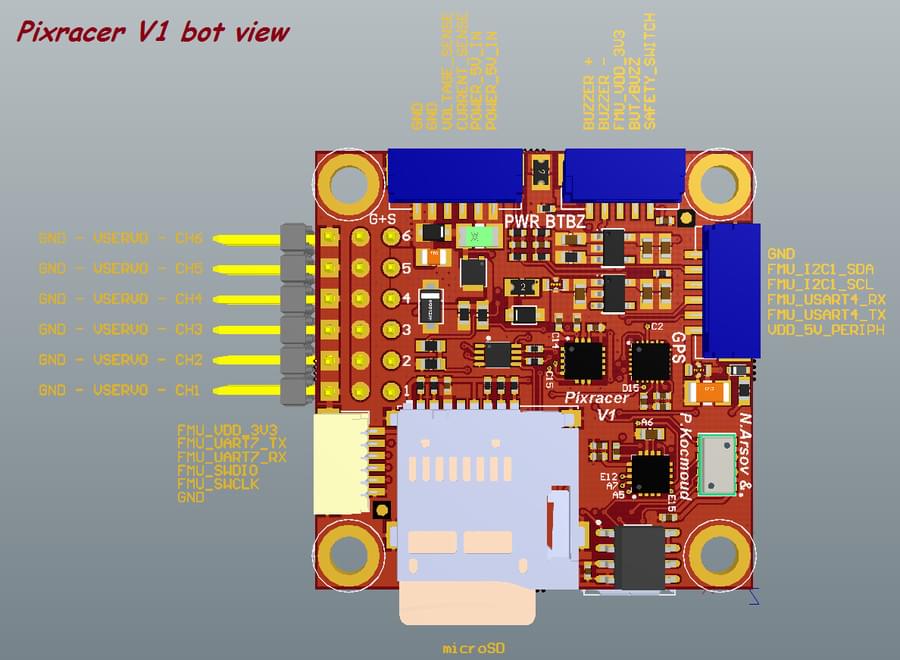
TELEM1、TELEM2 + OSD 端口
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | TX (OUT) | +3.3V |
| 3 | RX (IN) | +3.3V |
| 4(黑) | CTS (IN) | +3.3V |
| 6 | RTS (OUT) | +3.3V |
| 6 | GND | GND |
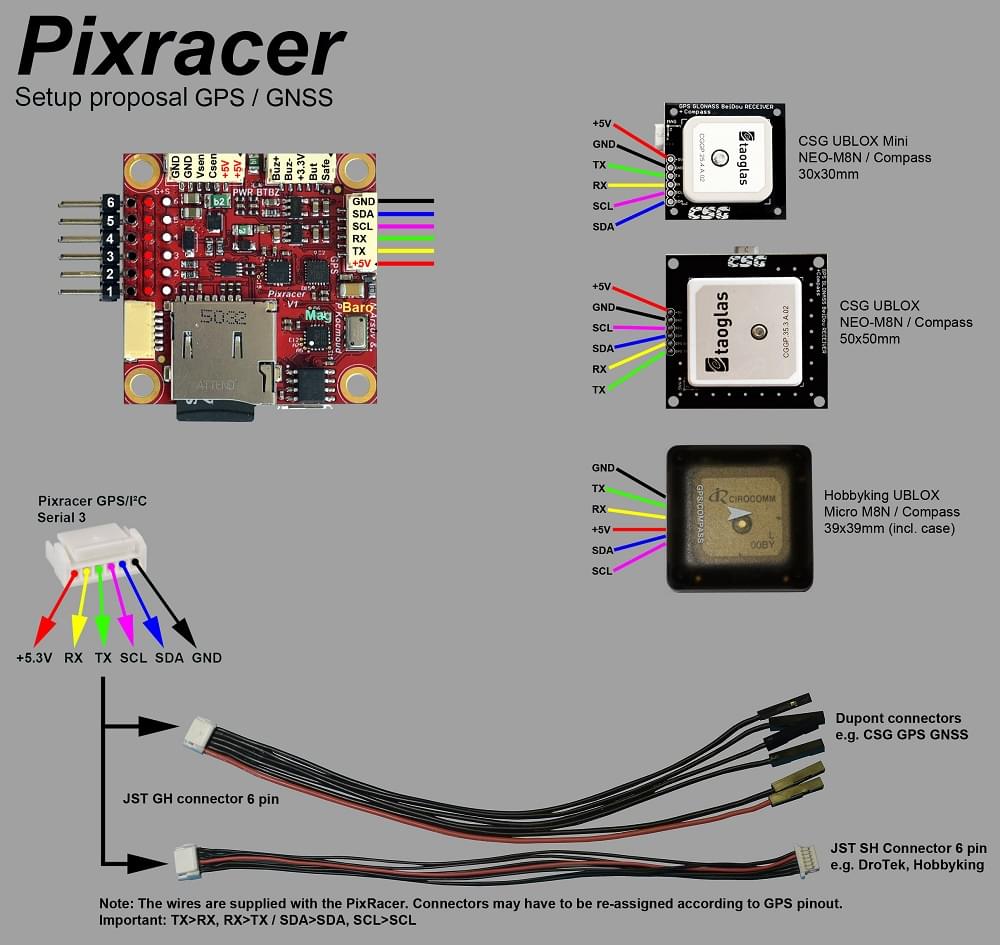
GPS 接口
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | TX (OUT) | +3.3V |
| 3 | RX (IN) | +3.3V |
| 4(黑) | I2C1 SCL | +3.3V |
| 6 | I2C1 SDA | +3.3V |
| 6 | GND | GND |
FrSky 遥测 / SERIAL4
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | TX (OUT) | +3.3V |
| 3 | RX (IN) | +3.3V |
| 4(黑) | GND | GND |
RC 输入(支持 PPM / S.BUS / Spektrum / SUMD / ST24)
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | RC IN | +3.3V |
| 3 | RSSI IN | +3.3V |
| 4(黑) | VDD 3V3 | +3.3V |
| 6 | GND | GND |
CAN
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | CAN_H | +12V |
| 3 | CAN_L | +12V |
| 4(黑) | GND | GND |
POWER
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | VCC | +5V |
| 3 | 电流 | +3.3V |
| 4(黑) | 电压 | +3.3V |
| 6 | GND | GND |
| 6 | GND | GND |
SWITCH
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | SAFETY | GND |
| 2 | !IO_LED_SAFETY | GND |
| 3 | VCC | +3.3V |
| 4(黑) | BUZZER - | - |
| 6 | BUZZER + | - |
调试接口
该调试接口的针脚定义和连接器符合 Pixhawk 调试迷你版 接口标准,该标准在 Pixhawk 连接器标准 中定义(JST SM06B 连接器)。
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC TARGET SHIFT | +3.3V |
| 2 | UART7 Tx | +3.3V |
| 3 | UART7 Rx | +3.3V |
| 4(黑) | SWDIO | +3.3V |
| 6 | SWCLK | +3.3V |
| 6 | GND | GND |
关于此端口的使用信息,请参考:
串口映射
| UART | 设备 | 端口 |
|---|---|---|
| UART1 | /dev/ttyS0 | WiFi (ESP8266) |
| USART2 | /dev/ttyS1 | TELEM1 (流控制) |
| USART3 | /dev/ttyS2 | TELEM2 (流控制) |
| UART4 | - | - |
| UART7 | CONSOLE | - |
| UART8 | SERIAL4 | - |
原理图
参考资料以 Altium 设计文件 形式提供。 以下 PDF 文件仅供参考:
- pixracer - rc12 - 12 - 06 - 2015 - 1330.pdf
- pixracer - r14.pdf - R14 或 RC14 印在 SD 卡插槽旁边
编译固件
TIP
大多数用户无需构建此固件! 当连接适配硬件时,它已预先构建并由 QGroundControl 自动安装。
要为该目标构建 PX4,请执行以下命令:
make px4_fmu-v4_default配置
指南针校准 应在断开 USB 连接的情况下进行。这是通用建议,在 Pixracer 上尤为必要,因为 USB 连接会产生较大的磁干扰。 其他配置与其他板卡相同。
致谢
此设计由 Nick Arsov 和 Phillip Kocmoud 完成,架构设计由 Lorenz Meier、David Sidrane 和 Leonard Hall 负责。