Holybro Pix32 v5飞行控制器
WARNING
PX4 不生产此(或任何)自动驾驶仪。若需硬件支持或解决合规性问题,请联系制造商。
Pix32 v5® 是一款由 Holybro® 设计制造的先进自动驾驶飞行控制器。它针对 PX4 固件运行进行了优化,适用于学术和商业开发者。该控制器基于 Pixhawk 项目 的 FMUv5 开源硬件设计,并在 NuttX 操作系统上运行 PX4。它可被视为 Pixhawk4 的变体版本。
Pix32 v5 专为需要高性能、灵活且可定制飞行控制系统的飞手而设计。它由一个独立的飞行控制器和载体(底座)板组成,通过 100 针连接器相连。这种设计使用户既可以选择 Holybro 制造的底座板,也可以自行定制。

INFO
此飞行控制器属于制造商支持类型。
总览
- 主处理器:STM32F765
- 32 位 Arm® Cortex® - M7,216MHz,2MB 存储,512KB 随机存取存储器
- IO 处理器:STM32F100
- 32 位 Arm® Cortex® - M3,24MHz,8KB 静态随机存取存储器
- 内置传感器:
- 加速度计 / 陀螺仪:ICM - 20689
- 加速度计 / 陀螺仪:BMI055 或 ICM20602
- 磁力计:IST8310
- 气压计:MS5611
- GPS:ublox Neo - M8N GPS/GLONASS 接收器;集成磁力计 IST8310
- 接口:
- 8 - 16 路PWM输出:(8 路来自 IO,8 路来自 FMU)
- FMU上有3个专用PWM / Capture输入
- CPPM专用的RC输入
- 用于 Spektrum / DSM 与 有模拟 / PWM RSSI 的 S.Bus 的专用遥控输入
- 专用 S.Bus 舵机输出
- 5个通用串行口:
- 2 个带全流量控制
- 1 个带独立 1.5A 电流限制
- 3 个 I2C 接口
- 4路SPI总线:
- 1 条内部高速 SPI 传感器总线,带 4 个片选和 6 个数据就绪信号(DRDY)
- 1 条内部低噪声 SPI 总线,专为特定用途设计
- 气压计总线,带 2 个片选,无数据就绪信号
- 1 条内部 SPI 总线,专为 FRAM 设计
- 支持位于传感器模块上的专用 SPI 校准 EEPROM
- 1 条外部 SPI 总线
- 多达 2 路 CAN 总线用于带串口的电调:
- 每条 CAN 总线都有独立的静默控制或电调 RX - MUX 控制
- 2 个电池电流 / 电压模拟输入口
- 2 个额外模拟输入
- 电气系统:
- 电源模块输出:4.9 - 5.5V
- 最大输入电压:6V
- 最大电流感应:120A
- USB 电源输入:4.75 - 5.25V
- 伺服导轨输入电压:0 - 36V
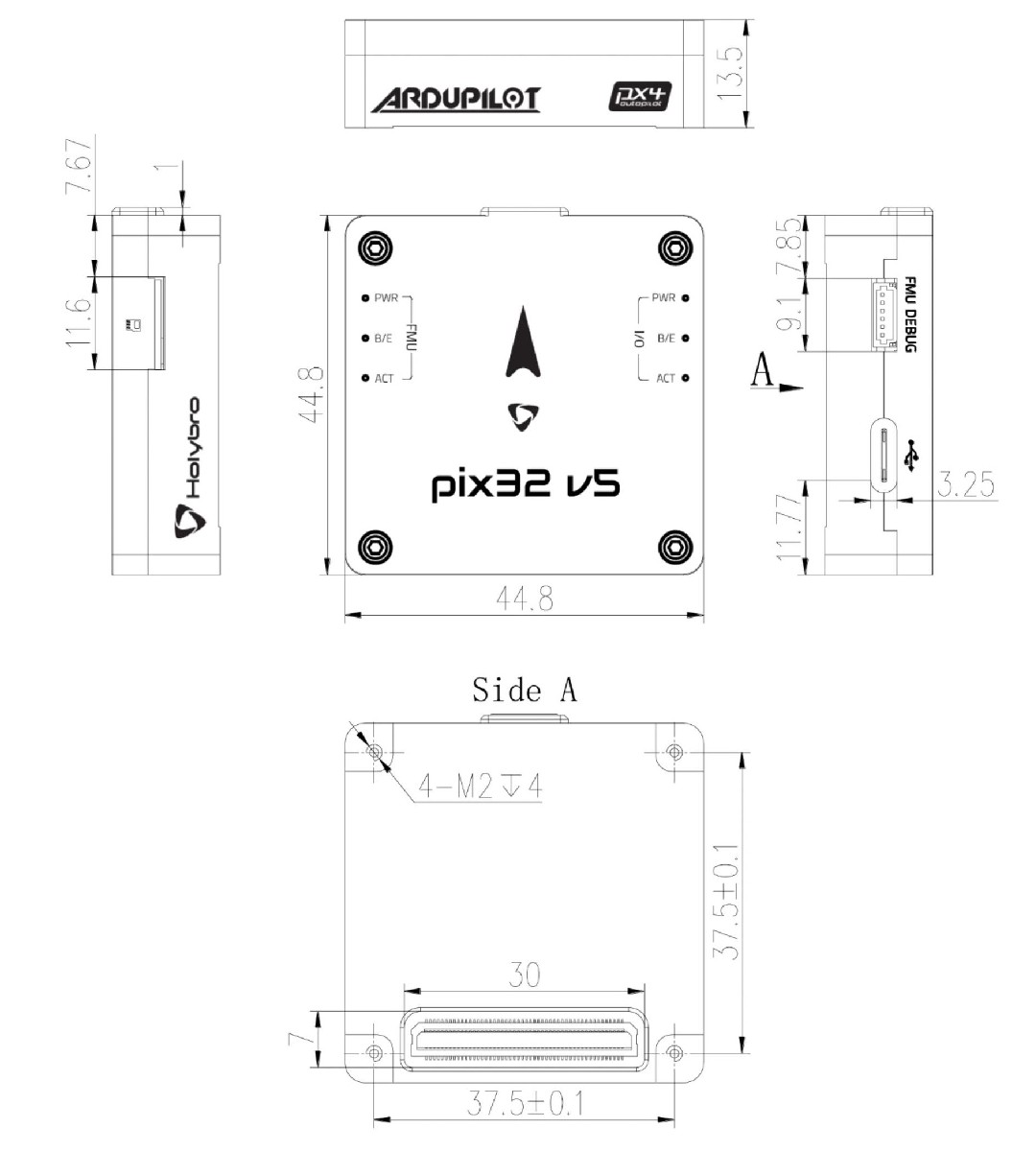
- 重量和尺寸:
- 尺寸:45x45x13.5mm
- 重量:33.0g
- 环境数据、质量与可靠性:
- 工作温度:-40 - 85°C
- 存储温度:-40 - 85°C
- 符合 CE 标准
- 符合 FCC 标准
- 符合 RoHS 标准(无铅)
更多信息可查阅 Pix32 V5 技术数据表。
购买渠道
可从 Holybro 官网 订购。
组装 / 设置
Pix32 v5 接线快速入门 提供了如何组装必要/重要外围设备的说明,包括 GPS、电源管理板等。
底座板布局
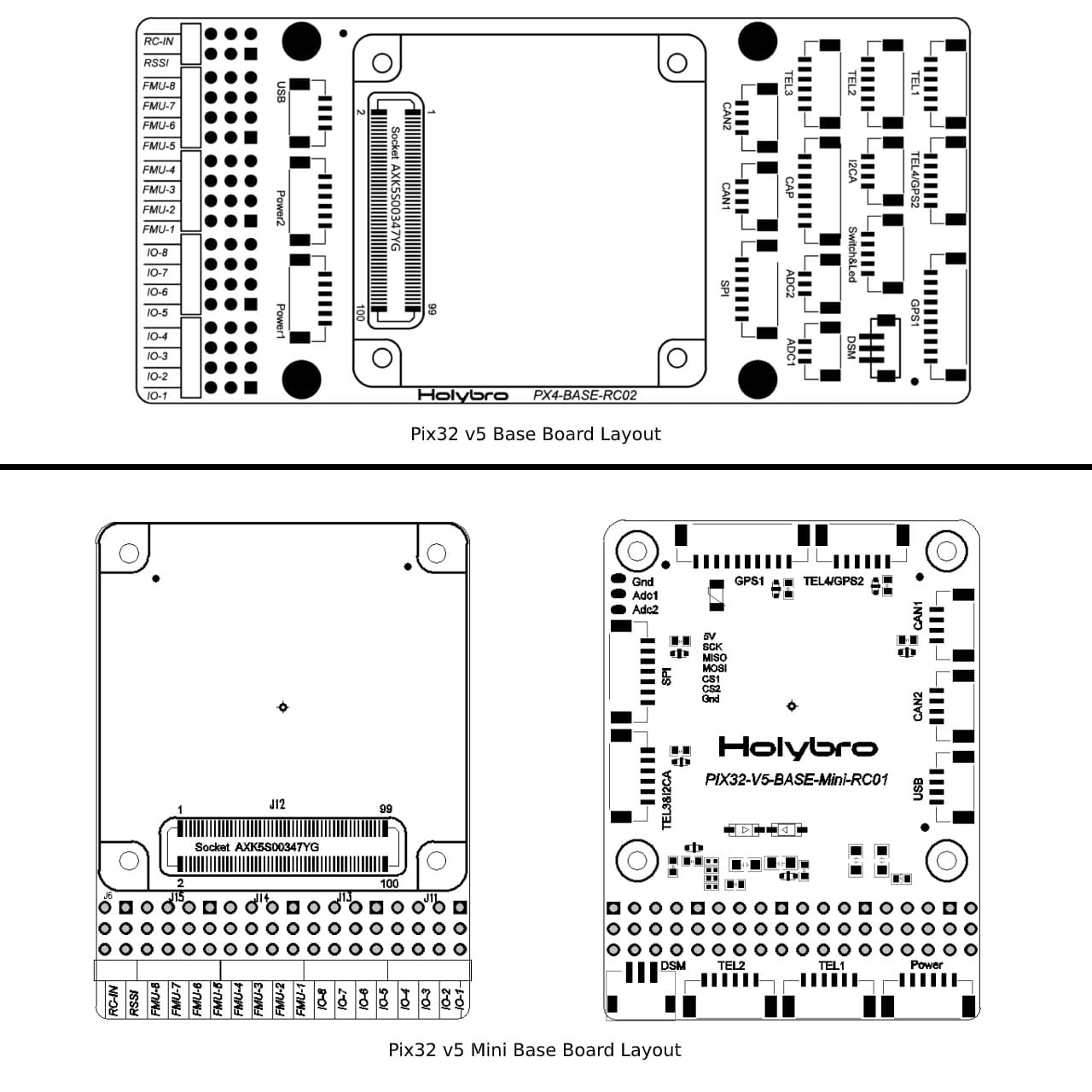
针脚定义
尺寸
额定电压
如果提供三个电源,Pix32 v5 的电源可实现三重冗余。三个电源轨分别为:POWER1、POWER2 和 USB。
INFO
输出电源轨 FMU PWM OUT 和 I/O PWM OUT(0V 至 36V)不为主控板供电(主控板也不为其供电)。必须为 POWER1、POWER2 或 USB 其中之一供电,否则主控板将无电。
正常运行最大额定值
在这些条件下,所有电源将按以下顺序为系统供电:
- POWER1 和 POWER2 输入(4.9V 至 5.5V)
- USB 输入(4.75V 至 5.25V)
绝对最大额定值
在这些条件下,系统将不消耗任何电力(不运行),但仍保持完好。
- POWER1 和 POWER2 输入(工作范围 4.1V 至 5.7V,0V 至 10V 不会损坏)
- USB 输入(工作范围 4.1V 至 5.7V,0V 至 6V 不会损坏)
- 伺服输入:FMU PWM OUT 和 I/O PWM OUT 的 VDD_SERVO 引脚(0V 至 42V 不会损坏)
编译固件
TIP
大多数用户无需构建此固件!当连接适配硬件时,它已预先构建并由 QGroundControl 自动安装。
要为该目标构建 PX4,执行以下指令:
make holybro_pix32v5_default调试接口
系统的串口控制台和 SWD 接口通过 FMU Debug 端口运行。
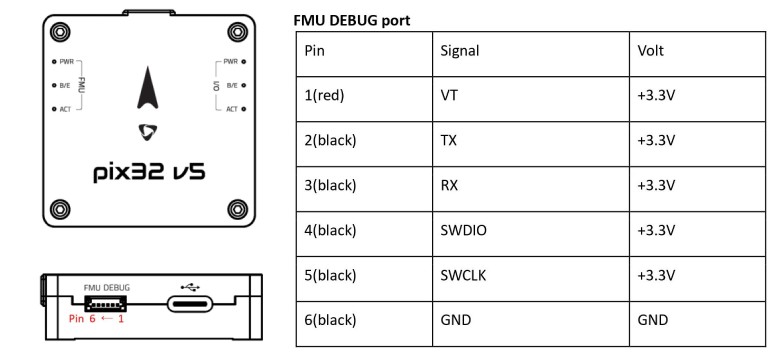
针脚定义采用 Pixhawk 连接器标准 中定义的标准 Pixhawk 迷你调试接口。
外部设备
支持的平台/机身
任何可通过普通遥控舵机或 Futaba S - Bus 舵机控制的多旋翼飞行器、飞机、地面车辆或船艇。完整的支持配置列表可在 机架参考 中查看。