TBS Caipiroshka
Caipiroshka垂直起降飞行器是一款经过略微改装的_TBS Caipirinha_。
INFO
TBS Caipirinha 已被替代,不再售卖。这些说明 “应该” 适用于其更新款飞行器:TBS Caipirinha 2。零件清单中的许多其他组件也已更新。
配件列表
- TBS Caipirinha机翼(已不再售卖 - 可尝试 TBS Caipirinha 2)
- 左右两侧3D打印电机支架(设计文件)
- 顺时针旋转8045螺旋桨(Eflight商店)
- 逆时针旋转8045螺旋桨(Eflight商店)
- 2个1800kv、120 - 180W电机
- 2个20 - 30S电调
- BEC(3A,5 - 5.3V)(如果你的电调不能提供5V的输出,可以用这个)
- 3S 2200 mA锂电池
- Team Orion 3S 11.1V 50 C(Hobbyshop商店)
- Pixracer自动驾驶板 + 电源模块
- 数字空速传感器
组装
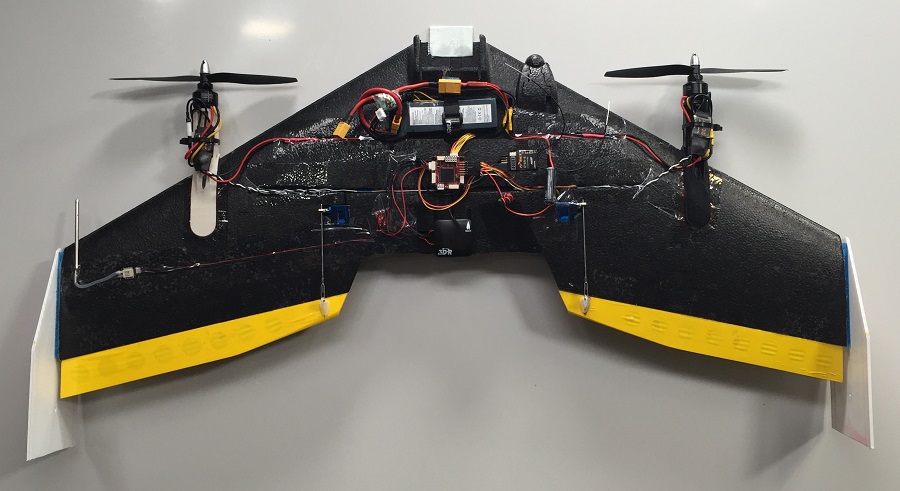
下图展示了完全组装好的Caipiroshka可能的样子。
以下将给出一些关于如何组装该飞行器的通用提示。
飞控
将自动驾驶仪安装在靠近机架重心的中间位置。
安装电机
打印电机支架(2个),STL文件链接在零件清单中已给出。在机翼两侧各安装一个电机支架,使电机轴大致穿过升降副翼的中心(见图)。在上图中,两个电机支架之间的水平距离为56厘米。在机翼上标记好正确位置后,你可以在机翼上下表面与支架接触的区域贴上标准透明胶带。然后在该区域涂上一层热熔胶,将电机支架粘在机翼上。在机翼表面和热熔胶之间使用胶带的原因是,你可以很容易地通过撕下机翼上的胶带移除电机支架,而不会造成任何损坏。这在需要更换损坏的电机支架时很有用。
电调
电机控制器可以使用胶水或扎带直接安装在电机支架的平面上。你需要将电源线铺设到电池舱。你可以使用旧烙铁在泡沫上烫出通道。在电池舱内连接两个电机控制器的电源线,并在末端焊接一个插头。这样你就可以将两个电机控制器连接到电源模块。如果你没有能为自动驾驶仪输出轨提供5V电压的电机控制器,那么你将需要使用外部电源(BEC)。
GPS
GPS可以安装在机架最后部的中间位置。由于两个电机、一台相机以及可能更大的电池会使飞机机头较重,这样做有助于将飞机的重量向后移动。此外,与12V电源线保持较大距离,有利于减少对外部磁力计的磁干扰。
空速传感器
将皮托管安装在机翼一侧靠近外侧边缘的位置。确保皮托管不受螺旋桨气流的影响。如果皮托管到电机轴的水平距离大于螺旋桨的半径,就应该没问题。例如,你可以使用旧烙铁为皮托管、管道和实际传感器制作一个凹槽(见图)。在机翼上开出一条通道,以便将电缆连接到其他组件。
连接传感器到I2C接口
空速传感器和外部磁力计(位于GPS外壳内)都需要连接到自动驾驶仪的I2C总线。因此,你需要使用零件清单中提到的I2C分流器。将分流器板连接到自动驾驶仪的I2C总线。然后使用标准I2C电缆将外部磁力计和空速传感器连接到分流器板。在上图中,分流器板位于GPS单元的左侧。
升降副翼
升降副翼可以用透明胶带粘贴在机翼的后侧。你可以参考Team Blacksheep在TBS Caiprinha机架的组装手册中提供的说明。
普通安装规则
在将所有组件安装到机翼上之前,先用胶带将它们固定在大致位置,检查机翼的重心是否在TBS Caipirinha组装手册中规定的推荐范围内。根据你想要安装在机上的其他组件(例如前面的GoPro相机或更大的电池),你需要调整组件的位置。
机架设置
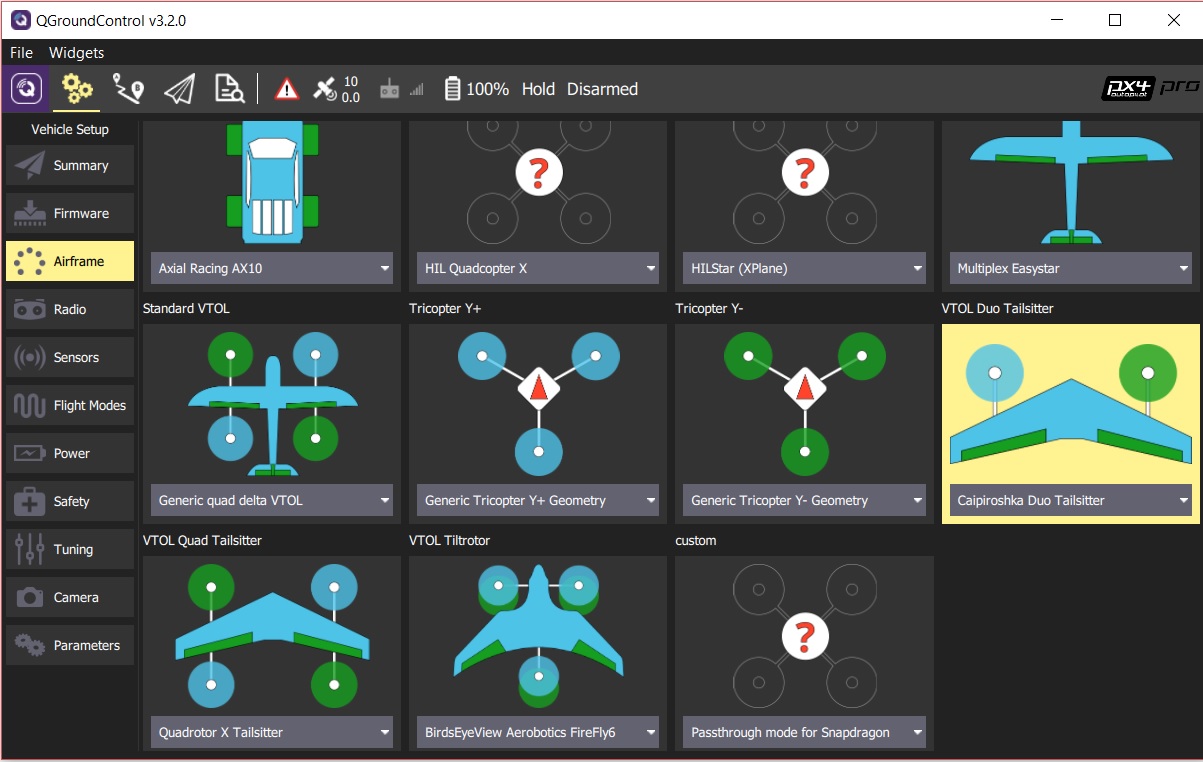
在QGroundControl中切换到配置部分,选择 “机架” 选项卡。在列表中向下滚动,找到 “VTOL Duo Tailsitter” 图标。从下拉列表中选择 “Caipiroshka Duo Tailsitter”。
连接舵机
下表中的描述是指当飞行器腹部平放在桌子上,用户面向飞行器前方时的情况。
| 输出 | 频率 | 执行器 |
|---|---|---|
| MAIN1 | 400 Hz | 右侧电机 |
| MAIN2 | 400 Hz | 左侧电机 |
| MAIN3 | 400 Hz | 空 |
| MAIN4 | 400 Hz | 空 |
| MAIN5 | 50 Hz | 右副翼 |
| MAIN6 | 50 Hz | 左副翼 |