返回模式 (Multicopter)
")
_返回_飞行模式用于让飞行器在畅通无阻的路径上_安全飞行_到安全目的地并降落。
多旋翼飞行器使用 home/rally point return type 默认情况下。 在这种返回类型中,如果需要,飞行器会上升到障碍物上方的安全高度,直接飞到最近的安全着陆点(集合点或起始位置),下降到“下降高度”,短暂等待,然后着陆。 返回高度、下降高度和着陆延迟通常设置为保守的“安全”值,但可以根据需要进行更改。
多旋翼飞行器支持 other PX4 return types, 包括任务着陆、任务路径和最近的安全目的地。 建议使用默认类型。
INFO
- 模式是自动的——无需用户干预即可控制车辆。
- 模式需要全局 3D 位置估计 (from GPS or inferred from a local position).
- 如果没有全球定位,飞行器就无法切换到此模式。
- 如果飞行器丢失位置估计,它们将失效安全。
- 模式需要设置主位置。
- 模式阻止布防(切换到此模式时车辆必须布防)。
- 遥控开关可以在任何无人机上更改飞行模式。
- 遥控摇杆运动将 by default 改变车辆 Position mode 除非处理关键的电池故障安全装置。
技术总结
多旋翼飞行器使用 home/rally point return type 默认情况下。 对于此返回类型,直升机:
- 上升到 minimum return altitude (safely above any expected obstacles). 如果初始高度高于最低返回高度,飞行器将保持其初始高度。
- 通过一条直接的恒定高度路径飞到安全着陆点,该着陆点将是距离所有集结点和本土位置最近的一个。
- 到达目的地后,飞机迅速下降至“下降高度” (RTL_DESCEND_ALT).
- 它等待可配置的时间 (RTL_LAND_DELAY), 可用于展开起落架。
- 然后着陆。
悬停/降落在目的地
默认情况下,_最低返回高度_设置为 RTL_RETURN_ALT, 车辆将以较高的价格返回 RTL_RETURN_ALT 或初始飞行器高度。
最低返回高度可以进一步配置使用 RTL_CONE_ANG, 以及 RTL_RETURN_ALT 定义以目的地着陆点为中心的半圆锥体。 当在目的地附近执行返回模式时,锥角允许较低的最低返回高度。 当目的地附近障碍物较少时,这很有用,因为它可以降低飞行器着陆前需要上升的最低高度,从而降低功率消耗和着陆时间。
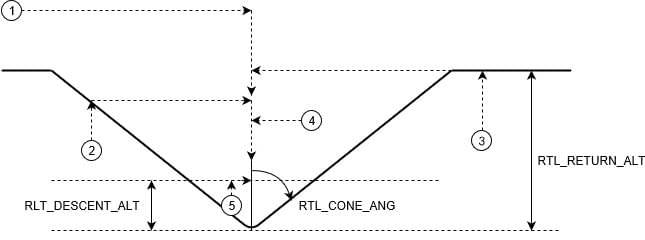
如果返回模式在由最大圆锥半径定义的圆柱体内触发,圆锥体将影响最小返回高度,并且 RTL_RETURN_ALT: 在这个圆柱体外面 RTL_RETURN_ALT 被使用。 在代码中,最低返回高度是车辆位置与锥体的交点,或者 RTL_DESCEND_ALT (以较高者为准)。 换句话说,车辆必须始终上升到至少 RTL_DESCEND_ALT 如果低于该值。
有关此返回类型的更多信息,请参阅 Home/Rally Point Return Type (RTL_TYPE=0)
参数
RTL 参数列于 Parameter Reference > Return Mode.
多旋翼飞行器相关参数 (assuming the RTL_TYPE 设置为0)如下所示。
| 参数 | 描述 |
|---|---|
| RTL_RETURN_ALT | Return altitude in meters (default: 60m) when RTL_CONE_ANG is 0. 如果已经超过这个值, 飞机将返回当前的高度。 |
| RTL_DESCEND_ALT | 最小返航高度和无人机从较高的返航高度到减速或者停止的初始下降高度(默认: 30米)。 |
| RTL_LAND_DELAY | Time to hover at RTL_DESCEND_ALT before landing (default: 0.5s) -by default this period is short so that the vehicle will simply slow and then land immediately. If set to -1 the system will loiter at RTL_DESCEND_ALT rather than landing. 延迟能够使你为起落架的展开部署配置时间(自动触发)。 |
| RTL_MIN_DIST | 能够触发无人机上升到返航高度,距离起始位置的最小水平距离由那个"锥形"指定。 If the vehicle is horizontally closer than this distance to home, it will return at its current altitude or RTL_DESCEND_ALT (whichever is higher) instead of first ascending to RTL_RETURN_ALT). |
| RTL_CONE_ANG | 圆锥半角决定无人机的 RTL 返航高度。 数值(度数):0、25、45、65、80、90。 Note that 0 is "no cone" (always return at RTL_RETURN_ALT or higher), while 90 indicates that the vehicle must return at the current altitude or RTL_DESCEND_ALT (whichever is higher). |
| COM_RC_OVERRIDE | Controls whether stick movement on a multicopter (or VTOL in MC mode) causes a mode change to Position mode (except when vehicle is handling a critical battery failsafe). 可以分别为自动模式和 offboard 模式启用此功能,默认情况下在自动模式下启用此功能。 |
| COM_RC_STICK_OV | The amount of stick movement that causes a transition to Position mode (if COM_RC_OVERRIDE is enabled). |