E-Flite “融合”号倾转旋翼机(搭配Pixfalcon)
E-Flite “融合”号 能够轻松借助PX4转换为全自主垂直起降飞行器。 机内空间不大,但足以容纳搭配GPS和数传模块的Pixfalcon 飞行控制器。
INFO
原地平线爱好公司(Horizon Hobby)的 E-Flite “融合”号 机身框架以及 Pixfalcon 已停产。 购买渠道部分提供了替代产品。
购买渠道
飞行器机身框架选择:
- WL Tech XK X450 - 速卖通
- JJRC M02 - Banggood(澳大利亚站),速卖通
飞行控制器选择:
- Pixhawk 4 Mini
- Holybro Pixhawk Mini
- 其他尺寸足够小的兼容飞行控制器。
硬件安装
该飞行器的电机和操纵面需要7路PWM信号:
- 电机(左/右/后)
- 倾转舵机(右/左)
- 升降副翼(左/右)
这些信号线可以按照你希望的方式连接到飞行控制器的输出端口(不过电机的输出端口应该集中连接,以此类推)。
按照垂直起降倾转旋翼机的几何结构和输出配置说明,在舵机配置 中对输出进行设置。 请注意,你需要从通用倾转旋翼垂直起降飞行器 机身框架设置开始。
注意,配置界面和机身框架说明中的“左”和“右”,是从真实飞机内的人类飞行员视角定义的(或者从上方俯瞰,如下图所示):

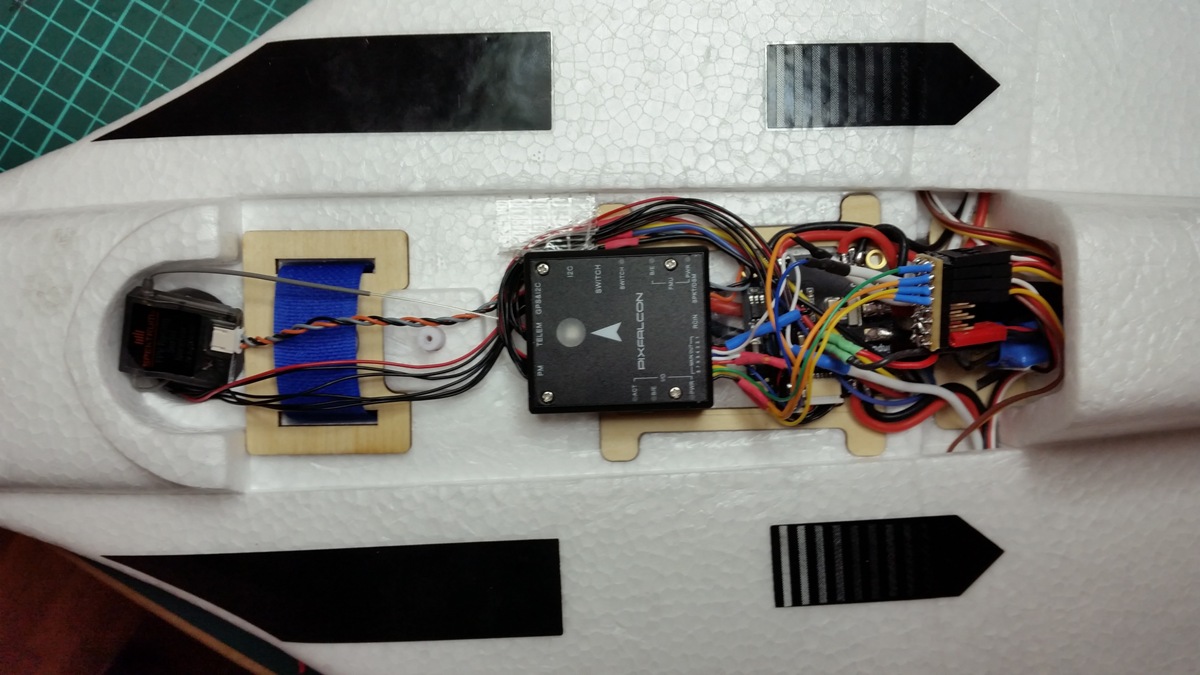
飞行控制器
飞行控制器可以安装在原自动驾驶仪所在的位置。
数传电台
数传模块可以安装在原本用于放置FPV传输设备的舱位。
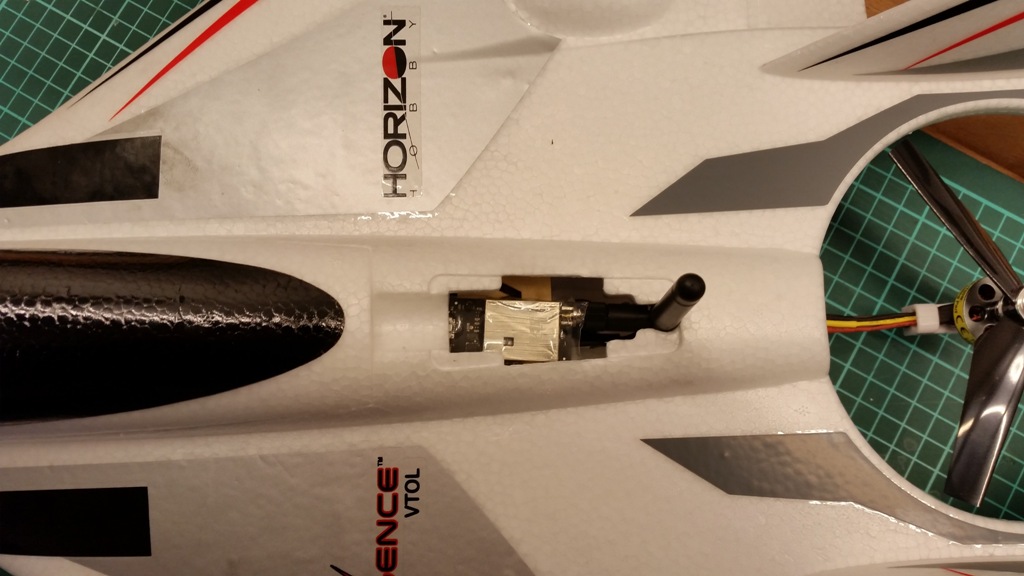
GPS
对于GPS模块,我们在“驾驶舱”内切割出一块泡沫区域。 这样GPS模块就可以放置在机身内部,收纳得很整齐,同时也不影响飞行器外观。

PX4配置
在 QGroundControl 中遵循标准配置(遥控器、传感器、飞行模式等)。
与该飞行器相关的特定设置如下:
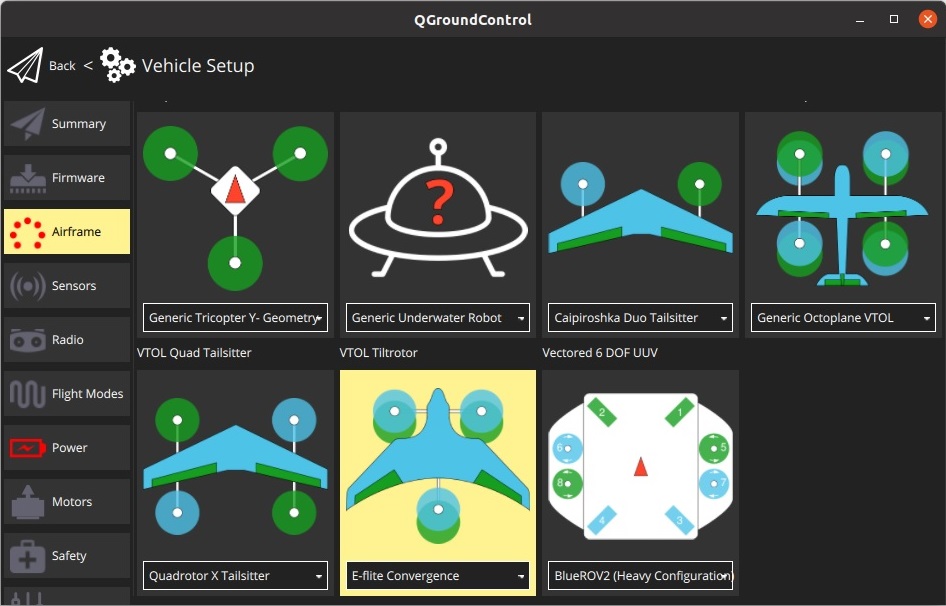
- 机身框架
- 在 垂直起降倾转旋翼机 下选择机身框架配置 E-flite “融合”号,然后重启 QGroundControl。
- 在 垂直起降倾转旋翼机 下选择机身框架配置 E-flite “融合”号,然后重启 QGroundControl。
- 飞行模式/开关
- 由于这是一架垂直起降飞行器,你必须为多旋翼和固定翼模式之间的转换指定一个遥控器开关。