位置模式(多旋翼)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
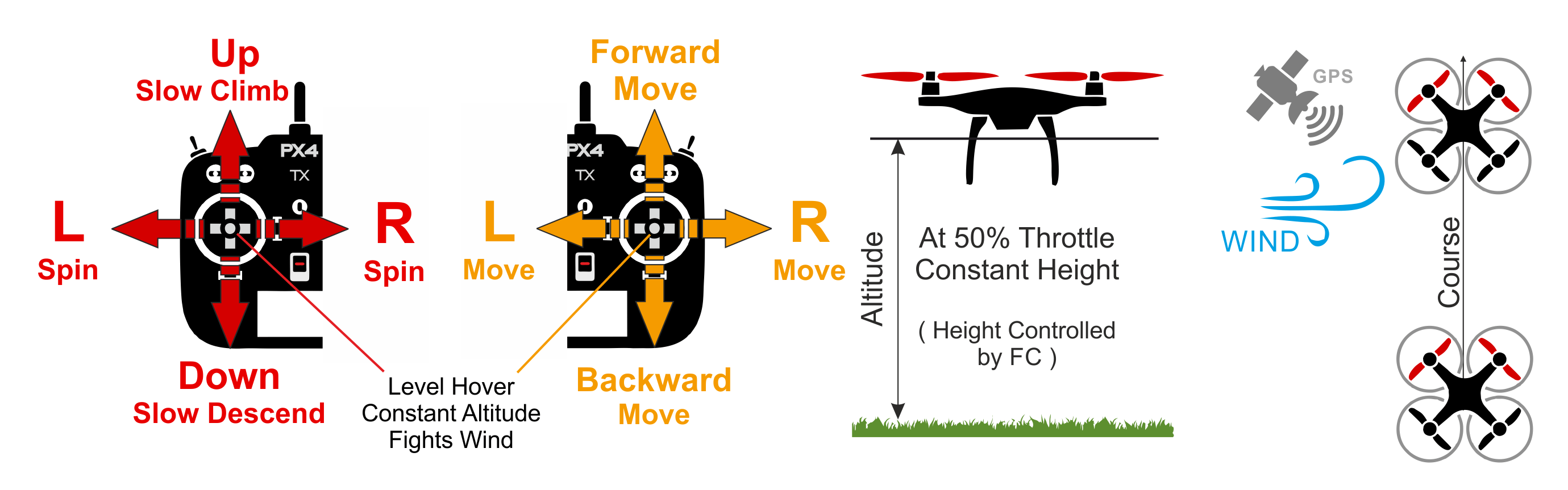
位置 是一种易于飞行的遥控模式,其中滚动和俯仰杆控制车辆在左右和前后方向上的地面加速度(类似于汽车的油门踏板),油门控制上升和下降的速度。 当摇杆松开/居中时,车辆将主动制动、调平并锁定在 3D 空间中的某个位置 - 补偿风和其他力。 在完全偏转摇杆的情况下,车辆最初加速 MPC_ACC_HOR_MAX 逐渐减速直至达到最终速度 MPC_VEL_MANUAL.
TIP
对于新飞行员来说,位置模式是最安全的手动模式。 Unlike Altitude and Stabilized 模式下,当操纵杆居中时,车辆将停止,而不是继续行驶直到受到风阻而减速。
下图直观地展示了模式行为 (for a mode 2 transmitter).
降落
该模式中降落是很容易的:
- 使用横滚和俯仰杆控制无人机水平位置于降落点上方。
- 松开横滚和俯仰杆并给予足够的时间使其完全停止。
- 轻轻下拉油门杆直到机体触碰地面。
- 将油门杆一直向下拉以促进和加快着陆检测。
- 飞行器将降低螺旋桨推力,探测地面并 automatically disarm (by default).
WARNING
虽然在校准良好的车辆上这种情况很少见,但有时仍会出现着陆问题。
- 如果机体无法停止水平移动:
- 你仍然可以在控制下着陆 Altitude mode. 方法与上述相同,除了您必须使用横滚和俯仰杆手动确保机体保持在降落点上方。
- 降落后检查 GPS 和磁罗盘方向,并校准。
- 如果车辆未检测到地面/着陆并解除武装:
- 车辆落地后,切换到 Stabilized mode 保持油门杆低位,然后使用手势或其他命令手动解除武装。 或者,当机体已经在地面上时,您也可以使用断电开关。
技术总结
遥控模式下,横滚、俯仰、油门 (RPT) 杆控制相应轴/方向的运动。 摇杆居中使机体水平并将其保持在固定的高度和位置并抗风。
- 中心横滚、俯仰、油门杆 (within RC deadzone MPC_HOLD_DZ) 保持 x、y、z 位置稳定,避免受到风等干扰。
- 外部中心:
- 横滚/俯仰摇杆分别控制车辆在左右和前后方向上的地面水平加速度。
- 油门杆控制上升和下降的速度。
- 偏航摇杆控制水平面上方的角度旋转速率。
- 起飞:
- 降落时,如果将油门杆抬高至 62.5%(从油门杆最低开始的整个范围),无人机将起飞。
- 需要全球位置估计。
- 需要手动控制输入(例如 RC 控制、操纵杆)。
- 滚转、俯仰、油门:自动驾驶仪协助保持位置以抵御风吹。
- 偏航:自动驾驶仪协助稳定姿态角。 遥控摇杆的位置与车辆在该方向上的旋转速率相对应。
参数
All the parameters in the Multicopter Position Control group are relevant. 下面列出了一些特别值得注意的参数。
| 参数 | 描述 |
|---|---|
| MPC_HOLD_DZ | 启用位置保持的摇杆死区。 默认值:0.1(摇杆全行程的 10%)。 |
| MPC_Z_VEL_MAX_UP | 最大垂直上升速度。 默认:3m/s。 |
| MPC_Z_VEL_MAX_DN | 最大垂直下降速度。 默认:1m/s。 |
| MPC_LAND_ALT1 | 触发第一阶段降速的高度。 Below this altitude descending velocity gets limited to a value between MPC_Z_VEL_MAX_DN (or MPC_Z_V_AUTO_DN) and MPC_LAND_SPEED. Value needs to be higher than MPC_LAND_ALT2. Default 10m. |
| MPC_LAND_ALT2 | 触发第二阶段降速的高度。 Below this altitude descending velocity gets limited to MPC_LAND_SPEED. Value needs to be lower than "MPC_LAND_ALT1". Default 5m. |
RCX_DZ | RC dead zone for channel X. The value of X for throttle will depend on the value of RC_MAP_THROTTLE. For example, if the throttle is channel 4 then RC4_DZ specifies the deadzone. |
MPC_XXXX | 大多数 MPC_xxx参数会影响此模式下的飞行行为(至少在某种程度上)。 For example, MPC_THR_HOVER defines the thrust at which a vehicle will hover. |
| MPC_POS_MODE | 从摇杆输入到机体动作的转换策略。 From PX4 v1.12 the default (Acceleration based) is that stick position controls acceleration (in a similar way to a car accelerator pedal). 其他选项允许操纵杆偏转直接控制地面速度,有或没有平滑和加速度限制。 |
| MPC_ACC_HOR_MAX | 最大水平加速度。 |
| MPC_VEL_MANUAL | 最大水平速度。 |
| MPC_LAND_SPEED | Landing descend rate. Landing descend rate. Default 0.7 m/s. |
附加信息
位置丢失/安全
位置模式依赖于一个可接受的位置估计。 如果估计值低于可接受水平,例如由于 GPS 丢失,这可能会触发 Position (GPS) Loss Failsafe. 如果估计值低于可接受的水平,例如由于 GPS 丢失,这可能会触发位置 (GPS) 丢失故障保护 根据配置,是否有遥控器,以及是否有足够的高度估计,PX4 可能会切换到高度模式、手动模式、降落模式或终止。