稳定模式 (Multicopter)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
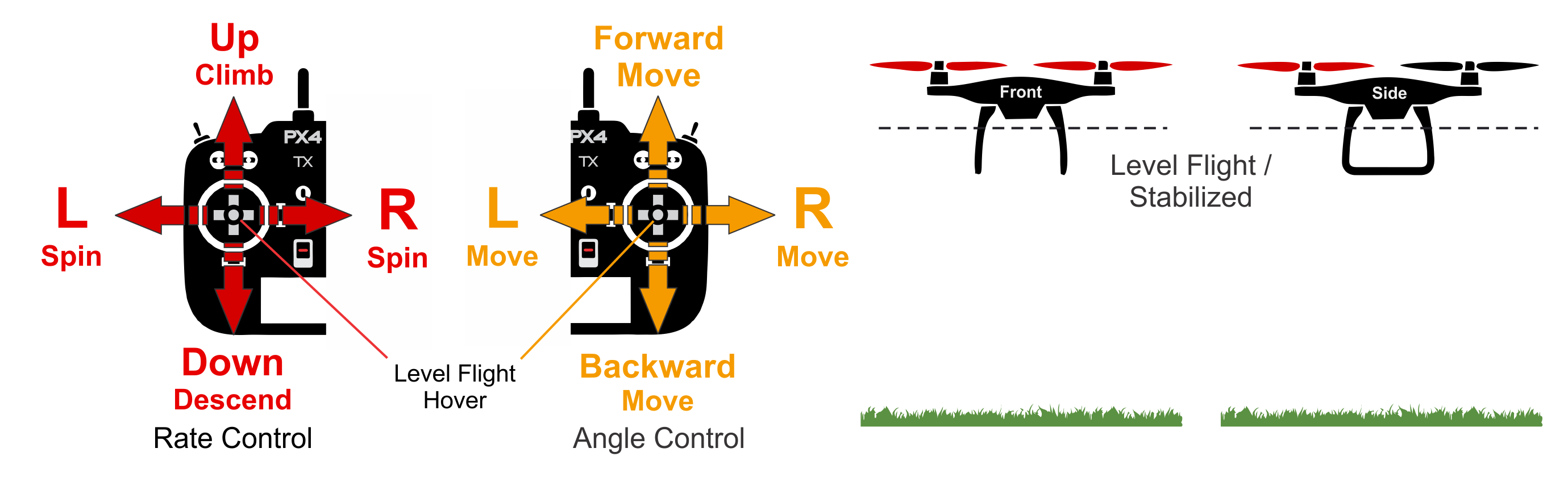
当遥控控制杆居中时,_稳定_手动模式可稳定和调平多旋翼飞行器。 要移动/飞行飞行器,请将控制杆移出中心。
INFO
如果您将飞行模式设置为“手动”,此模式也会启用。
当操纵杆位于中心之外时,滚转和俯仰操纵杆控制车辆绕各自轴的角度(姿态),偏航操纵杆控制水平面上方的旋转速率,油门控制高度/速度。
一旦释放摇杆,它们将会返回中心停顿区。 一旦横滚和俯仰摇杆居中,多旋翼无人机将平稳并停止运动。 然后,飞行器将悬停在原地/保持高度 - 只要平衡得当,油门设置得当 (see below), and no external forces are applied (e.g. wind). 飞行器将朝着任何风的方向漂移,您必须控制油门以保持高度。
技术描述
以中心摇杆为水平的车辆的 RC 模式。
INFO
Altitude mode 当操纵杆居中时,还可以稳定车辆高度,并且 Position mode 稳定地面的高度和位置。
飞手的输入通过横滚和俯仰角度以及偏航角速率指令传递给自驾仪。 油门已重新调节 (see below) 并直接传递给控制分配。 自动驾驶仪控制着飞机的姿态角,这意味着当 RC 摇杆居中时自驾仪调整飞机的滚转和俯仰角为零(从而实现飞机姿态的改平)。 自动驾驶仪不能补偿由于风(或其他来源)引起的漂移。
- 回正摇杆(内带死区):
- 滚动/俯仰摇杆使车辆保持水平。
- 外部中心:
- 滚动/俯仰摇杆控制这些方向的倾斜角度,从而产生相应的左右和前后运动。
- 油门杆控制上下速度(以及其他轴的移动速度)。
- 偏航摇杆控制水平面上方的角度旋转速率。
- 需要手动控制输入(例如 RC 控制、操纵杆)。
- 滚转、俯仰:自动驾驶仪协助稳定姿态。 遥控摇杆的位置与车辆的方向相对应。
- 油门:通过遥控杆手动控制。遥控输入直接发送到控制分配。
- 偏航:自动驾驶仪协助稳定姿态角。 遥控摇杆的位置与车辆在该方向上的旋转速率相对应。
参数
| 参数 | 描述 |
|---|---|
| MPC_THR_HOVER | Hover throttle that is output when the throttle stick is centered and MPC_THR_CURVE is set to default. |
| MPC_THR_CURVE | 定义油门缩放比例。 By default this is set to Rescale to hover thrust, which means that when the throttle stick is centered the configured hover throttle is output (MPC_THR_HOVER) and the stick input is linearly rescaled below and above that (allowing for a smooth transition between Stabilized and Altitude/Position control). 在动力很强的机体上,悬停油门可能非常低(例如低于 20%),因此重新调整会使油门输入变形 - 对应上面举例, 80% 的推力将仅由摇杆输入的中位以上部分控制,20% 的推力由中位以下的部分来控制。 If needed MPC_THR_CURVE can be set to No Rescale so that there is no rescaling (stick input to throttle mapping is independent of MPC_THR_HOVER). |