固定翼配平指南
配平校准旨在计算或设定在特定配平状态下(该状态涉及相对空速、空气密度、迎角、飞机配置等因素)的控制面偏转角度。一架经过恰当配平设置的飞机,在配平状态飞行时能够自动保持姿态,无需飞行员或增稳计算机额外操控。
在通用航空、商业航空以及大型无人飞机领域,通常借助调整片来对控制面进行配平;而小型无人机则仅需在控制面的执行机构上添加一个偏移量。
基础配平部分阐述了各配平参数的作用以及如何确定其正确数值。高级配平部分则介绍了一些参数,通过设置这些参数,可依据测量得到的空速和襟翼位置自动调整配平。
基础配平
操作人员可借助多个参数来对固定翼飞机进行准确配平。以下是对这些参数及其应用场景的简要说明:
- RCx_TRIM 用于对来自遥控发射器的信号进行配平。在遥控器校准过程中,这些参数会自动设定。
- CA_SV_CSx_TRIM 用于对控制面通道进行配平。此参数用于在飞行前精确调整控制面,使其与默认角度对齐。
- FW_PSP_OFF 用于给俯仰设定点添加偏移量。该参数用于确定飞机在巡航速度飞行时所需的迎角。
- FW_AIRSPD_TRIM 可让速率控制器根据测量到的空速调整输出。更多细节可参考[空速缩放](../flight_stack/controller_diagrams.md#airspeed - scaling)。
- TRIM_ROLL、TRIM_PITCH 和 TRIM_YAW 用于在信号混合之前对控制信号进行配平。例如,如果升降舵有两个舵机,
TRIM_PITCH会同时对这两个舵机进行配平。这些参数适用于控制面已对齐,但手动飞行时飞机出现俯仰、横滚、偏航等不稳定情况,或者在增稳飞行时控制信号存在恒定偏移的场景。
设置上述参数的正确顺序如下:
- 若有可能,通过物理调整连杆长度来对舵机进行粗调,然后在实验台上通过微调PWM通道(使用
PWM_MAIN/AUX_TRIMx)来精确调整控制面,使其达到理论位置。 - 在稳定模式下以巡航速度飞行,将俯仰设定点偏移量(
FW_PSP_OFF)设置为所需的迎角。巡航速度下的需用迎角,即飞机在平飞状态保持固定高度时的实际飞行迎角。若使用了空速传感器,还需设置正确的巡航空速(FW_AIRSPD_TRIM)。 - 查看日志文件中的执行器控制数据(例如,将日志文件上传至Flight Review 并查看 “执行器控制” 图表),然后设置俯仰配平(
TRIM_PITCH)。将该值设为平飞时俯仰角度的平均值。
如果您不想查看日志,或者在手动模式下操作感觉自如,步骤3也可以在步骤2之前执行。随后,您可以通过遥控器上的配平开关对遥控器进行配平,并将配平值记录到 TRIM_PITCH 中(同时清除遥控器上的配平设置),或者在飞行过程中通过遥测和QGC直接更新 TRIM_PITCH。
高级配平
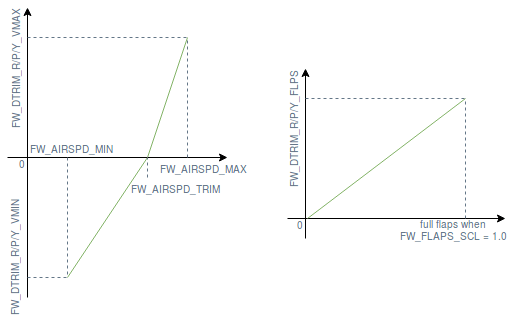
随着空速增加,由于非对称翼型以及襟翼的使用,会在俯仰通道引入低头力矩。因此,飞机需要根据测量得到的空速和襟翼位置重新计算配平。为此,可以使用以下参数定义一个关于空速的双线性曲线函数,以及一个关于襟翼状态的俯仰修正增量函数(见下图):
- FW_DTRIM_[R/P/Y]_[VMIN/VMAX] 是在最小/最大空速(由 FW_AIRSPD_MIN 和 FW_AIRSPD_MAX 定义)下,添加到
TRIM_ROLL/PITCH/YAW的横滚/俯仰/偏航配平值。 - CA_SV_CSx_FLAP 和 CA_SV_CSx_SPOIL 分别是当襟翼或扰流板完全展开时,应用于这些控制面的配平值。
理想的完全对称机体仅需俯仰配平增量,但由于实际机体并非绝对对称,有时也需要横滚和偏航配平增量。