QGroundControl飞行准备状态
PX4会执行一系列飞行前传感器质量和估计器检查,以确定例如是否有足够好的位置估计,使飞行器能够在当前模式下飞行。如果飞行器未准备好,PX4将阻止解锁。
QGroundControl可用于判断飞行器是否准备好飞行,更重要的是,能确定哪些检查未通过。
:::提示 你也可以从飞行器状态LED灯 和警告提示音 获取准备状态通知。然而,QGC是确定PX4无法解锁确切原因的唯一途径。 :::
飞行准备状态
整体的“飞行准备情况”显示在QGroundControl左上角靠近 Q 菜单图标的位置,如下所示:
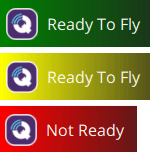
有三种状态:
- “准备飞行”(绿色背景):飞行器在所有模式下都准备好飞行,可以解锁。
- “准备飞行”(琥珀色背景):飞行器在当前模式下准备好飞行,可以解锁,但某些检查未通过,这意味着它无法切换到其他某些模式。
- “未准备好”(琥珀色背景):飞行器在当前模式下未准备好飞行,无法解锁。
QGC解锁检查报告
PX4 v1.14 QGC v4.2.0你可以使用QGroundControl 解锁检查报告(在“飞行视图”中),了解哪些预解锁检查未通过。要访问此用户界面,请选择QGroundControl飞行视图左上角的飞行准备状态 指示器。
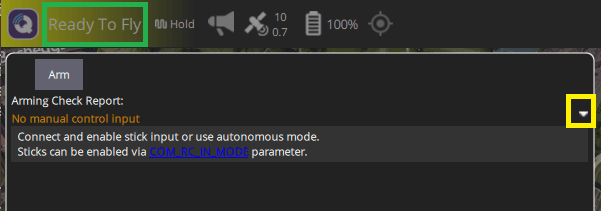
然后,解锁检查报告将弹出,并列出所有当前警告,每个警告右侧有一个切换按钮,展开每个条目可查看更多信息和可能的解决方案。
每个问题解决后,它将从用户界面中消失。当所有阻止解锁的问题都被解决后,你可以使用解锁按钮显示解锁确认滑块,从而解锁飞行器(或者你也可以直接起飞)。
:::提示 QGC解锁检查用户界面在QGC每日构建版本(QGC v4.2.0及更高版本)中可用,并且适用于PX4 v1.14及更高版本。 :::
飞行日志
飞行前错误也会在“QGroundControl”中以“PREFLIGHT FAIL”消息报告。日志中 的“estimator_status.gps_check_fail_flags”消息显示哪些GPS质量检查未通过。
请注意,解锁检查报告 是确定失败原因的更简便方法,但日志在PX4 v1.14之前的版本中可能有用。
EKF飞行前检查/错误
本节列出由EKF 报告(并传播到“QGroundControl”)的错误,以及相关检查和参数。这些仅提供信息参考(QGC解锁检查用户界面是获取错误和解决方案信息的最佳方式)。
PREFLIGHT FAIL: EKF HIGH IMU ACCEL BIAS
EKF IMU加速度偏差是指IMU传感器报告的测量加速度与EKF2估计器报告的预期加速度之间的差异(EKF2估计器融合了来自多个源的位置和/或速度数据,包括IMU、GNSS、流量传感器等)。该偏差在传感器开启时(“开启偏差”)可能会发生变化,并且随着时间推移,由于噪声和温度差异(“运行中偏差”)也会改变。该数值通常应非常小(接近零),表明来自不同源的测量结果在加速度方面一致。
该警告表明偏差高于某个任意阈值(飞行器将不允许起飞)。这很可能表明需要对加速度计进行校准或进行热校准:
- 如果你偶尔收到该警告:重新校准加速度计。
- 如果你经常收到该警告:执行热校准。
- 如果你在热校准后仍然收到该警告(或者你无法执行热校准):
- 验证问题并非来自传感器或自动驾驶硬件:
- 最简单的方法是使用另一个自动驾驶仪测试相同的机架/传感器。
- 或者,在SDLOG_PROFILE 中启用“6: Sensor comparison”,通过多次台架测试运行记录并比较 所有加速度计数据。
- 尝试更改加速度计偏差学习调整参数。
- 验证问题并非来自传感器或自动驾驶硬件:
增加这些参数会使自动驾驶仪不太可能检测到异常,并且可能会改变估计器的稳定性。然而,如果传感器存在无法通过其他方式修复的问题,这可能是必要的(即你可以调整EKF以获得更好的性能,但无法“更好地”校准加速度计)。
:::警告 调整这些参数是最后的手段。只有在你有数据表明这将提高估计器性能时,才应尝试。 :::
| 参数 | 描述 |
|---|---|
| EKF2_ABL_LIM | EKF允许估计的最大偏差值(超过此值,偏差将被截断,EKF将尝试重置自身,甚至可能在多EKF系统中切换到具有正常工作IMU的更健康的EKF)。在飞行前检查期间,如果估计偏差超过此参数的75%,自动驾驶仪将报告“高加速度偏差”并阻止起飞。当前0.4m/s² 的值已经相当高,增加它会使自动驾驶仪不太可能检测到问题。 |
| EKF2_ABIAS_INIT | 初始偏差不确定性(如果校准完美,这与传感器的“开启偏差”相关)。如果用户知道传感器校准良好且开启偏差较小,可能希望降低该值。 |
| EKF2_ACC_B_NOISE | 加速度计的预期“运行中偏差”,即“我们预期偏差每秒变化多快”。默认情况下,此值足够大,以包括由于温度变化引起的漂移。如果IMU已进行温度校准,用户可能希望降低此参数。 |
| EKF2_ABL_ACCLIM | 估计器尝试学习加速度偏差时的最大加速度。这是为了防止估计器由于非线性和比例因子误差而学习到偏差。(几乎没有用户需要更改此参数,除非他们真的知道自己在做什么)。 |
PREFLIGHT FAIL: EKF HIGH IMU GYRO BIAS
- 当EKF估计的IMU陀螺仪偏差过大时会产生该错误。
- 在这种情况下,“过大”意味着偏差估计超过10deg/s(配置限制的一半,硬编码为20deg/s)。
PREFLIGHT FAIL: ACCEL SENSORS INCONSISTENT - CHECK CALIBRATION
- 当来自不同IMU单元的加速度测量值不一致时,会产生此错误消息。
- 此检查仅适用于具有多个IMU的板。
- 该检查由COM_ARM_IMU_ACC 参数控制。
PREFLIGHT FAIL: GYRO SENSORS INCONSISTENT - CHECK CALIBRATION
- 当来自不同IMU单元的角速率测量值不一致时,会产生此错误消息。
- 此检查仅适用于具有多个IMU的板。
- 该检查由COM_ARM_IMU_GYR 参数控制。
PREFLIGHT FAIL: COMPASS SENSORS INCONSISTENT - CHECK CALIBRATION
- 当不同指南针传感器的测量差异过大时,会产生此错误消息。
- 它表明校准不良、方向错误或存在磁干扰。
- 此检查仅适用于连接了多个指南针/磁力计的情况。
- 该检查由COM_ARM_MAG_ANG 参数控制。
PREFLIGHT FAIL: EKF INTERNAL CHECKS
- 如果水平GPS速度、偏航角、垂直GPS速度或者垂直位置传感器(气压计默认情况下可以使测距仪或GPS ,如果使用非标准参数)其中之一新息过多,会产生此错误消息。新息指的是惯性导航计算预测值与传感器测量值之间的差异。
- 用户应检查日志文件中新息级别以确定原因。这些可以在“ekf2_innovations”消息下找到。常见问题/解决方案包括:
- IMU启动时漂移。可以通过重启自动驾驶仪来解决。可能需要IMU加速度计和陀螺仪校准。
- 相邻磁干扰在飞行器运动中。通过等待或者重新上电解决。
- 磁力计校准不良在飞行器运动中。通过重新校准解决。
- 启动时的初始冲击或快速移动导致惯性导航失败。通过重新启动飞行器并在前5秒内最大限度地减少移动来解决此问题。
其他参数
以下参数也会影响飞行前检查。
COM_ARM_WO_GPS
COM_ARM_WO_GPS 参数控制在没有全局位置估计的情况下是否允许解锁。
1(默认值):仅对于不需要位置信息的飞行模式,在没有位置估计的情况下允许解锁。0:仅当EKF提供全局位置估计且EKF GPS质量检查通过时,才允许解锁。