Windows 开发环境(基于 WSL2)
以下说明将介绍如何在 Windows 10 或 11 系统上,借助 WSL2 运行的 Ubuntu Linux 来搭建 PX4 开发环境。
按照本文指示搭建的开发环境可用于编译以下内容:
TIP
此设置方案由 PX4 开发团队提供支持。理论上,该环境能够编译任何可在 Ubuntu 上编译的目标。上述列表中的目标是经过常规测试的。
综述
适用于 Linux 的 Windows 子系统(WSL2)允许用户在 Windows 上安装并运行 Ubuntu 开发环境,其使用体验几乎与在 Linux 计算机上运行无异。
借助此环境,开发者可以:
- 在 WSL 终端中编译 Ubuntu 开发环境 支持的任何模拟器或硬件目标(Ubuntu 是 PX4 开发平台中支持和测试最完善的系统)。
- 在运行于 Windows 的 Visual Studio Code 中调试代码。
- 使用在 WSL 中运行的 QGroundControl for Linux 监控仿真环境。Linux 版 QGC 会自动连接到仿真环境。
若有以下需求,则还需安装 QGroundControl for Windows:
- 更新真实飞行器的固件。
- 监控真实飞行器。需要注意的是,也可以使用它来监控仿真环境,但必须手动 连接到在 WSL 中运行的仿真环境。
INFO
WSL 不支持从内部连接 USB 设备,因此在命令行编译时无法使用 upload 选项更新固件,也不能通过 QGroundControl for Linux 更新固件。
INFO
这种方法与在自己的虚拟机中安装 PX4 类似,具体可参考 Windows 虚拟机托管工具链。WSL2 的优势在于其虚拟机与 Windows 深度集成,由系统管理,并且经过了性能优化。
安装
安装 WSL2
要在全新安装的 Windows 10 或 11 系统上安装带有 Ubuntu 的 WSL2,请按以下步骤操作:
- 确保计算机 BIOS 中已启用虚拟化功能。该功能通常分别被称为 “虚拟化技术”、“Intel VT-x” 或 “AMD-V”。
- 以管理员身份打开 cmd.exe。可以通过按下开始键,输入
cmd,右键单击 “命令提示符” 条目,然后选择 “以管理员身份运行” 来实现。 - 执行以下命令来安装 WSL2 和特定版本的 Ubuntu:
- 默认版本(Ubuntu 22.04):sh
wsl --install - Ubuntu 20.04(Gazebo-Classic 仿真环境)sh
wsl --install -d Ubuntu-20.04 - Ubuntu 22.04(Gazebo 仿真环境)sh
wsl --install -d Ubuntu-22.04
INFO
你也可以从应用商店安装 Ubuntu 20.04 和 Ubuntu 22.04,这样就可以通过常规的 Windows 添加/删除程序设置来卸载应用程序。
- 默认版本(Ubuntu 22.04):
::: 4. WSL 会提示你为 Ubuntu 安装设置用户名和密码。请记录这些凭据,因为后续可能会用到!
此时,命令提示符已变为新安装的 Ubuntu 环境中的终端。
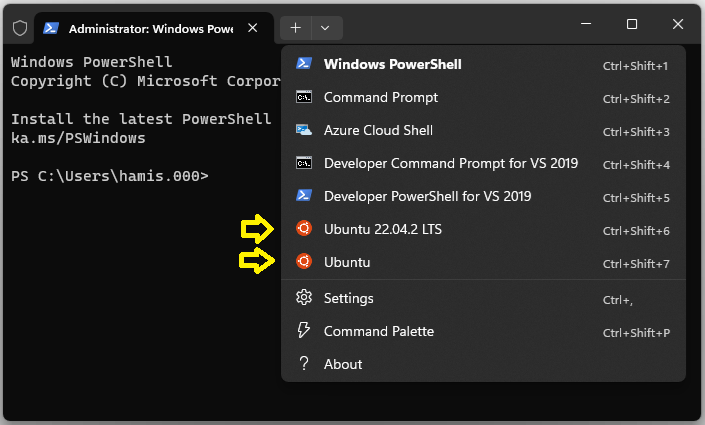
打开 WSL 终端
所有安装和编译 PX4 的操作都必须在 WSL 终端中完成(可以使用安装 WSL2 时的终端,也可以打开一个新的终端)。
如果你使用的是 Windows 终端,可以按照图示打开已安装的 WSL 环境的终端,并通过关闭标签页退出。
若要使用命令提示符打开 WSL 终端,请按以下步骤操作:
- 打开命令提示符:
- 按下 Windows 开始 键。
- 输入
cmd并按下 Enter 键打开命令提示符。
- 要启动 WSL 并进入 WSL 终端,请执行以下命令:sh例如:
wsl -d <发行版名称>shwsl -d Ubuntush如果你只安装了一个版本的 Ubuntu,可以直接使用wsl -d Ubuntu-20.04wsl。
输入以下命令先关闭 WSL 终端,然后关闭 WSL:
exit
wsl -d <发行版名称> --shutdown或者,输入 exit 后直接关闭命令提示符。
安装 PX4 工具链
接下来,我们在 WSL2 环境中下载 PX4 源代码,并使用常规的 Ubuntu 安装脚本 来设置开发环境。这将安装用于 Gazebo Classic 仿真和 Pixhawk/NuttX 硬件的工具链。
要安装开发工具链,请按以下步骤操作:
- 打开 WSL2 终端(如果之前的终端仍处于打开状态,可以继续使用)。
- 执行命令
cd ~切换到 WSL 的主文件夹,以便进行后续步骤。WARNING
这一步非常重要!如果在 WSL 文件系统之外的位置进行操作,可能会遇到执行速度极慢以及访问权限错误等问题。
::: 3. 使用 git(WSL2 中已预装)下载 PX4 源代码: sh git clone https://github.com/PX4/PX4-Autopilot.git --recursive ::: info 源代码中的环境设置脚本通常适用于较新的 PX4 版本。如果使用的是较旧版本的 PX4,可能需要 获取特定版本的源代码。 ::: 4. 运行 ubuntu.sh 安装脚本,并在脚本执行过程中确认所有提示信息: sh bash ./PX4-Autopilot/Tools/setup/ubuntu.sh ::: info 此脚本将安装用于编译 Pixhawk 以及 Gazebo 或 Gazebo Classic 目标的工具: - 可以使用 --no-nuttx 和 --no-sim-tools 选项省略 NuttX 和/或仿真工具的安装。 - 其他 Linux 编译目标未经测试(你可以尝试将 Ubuntu 开发环境 中的相应命令输入到 WSL 终端中)。 ::: 5. 脚本执行完成后,重启 “WSL 计算机”(退出终端,关闭 WSL,然后重新启动 WSL): sh exit wsl --shutdown wsl 6. 切换到 WSL 主文件夹中的 PX4 仓库: sh cd ~/PX4-Autopilot 7. 编译 PX4 SITL 目标并测试环境: sh make px4_sitl 更多编译选项请参考 构建 PX4 软件。
Visual Studio Code 集成
运行于 Windows 的 VS Code 与 WSL 集成度很高。
要设置集成,请按以下步骤操作:
- 在 Windows 上 下载 并安装 Visual Studio Code(VS Code)。
- 打开 VS Code。
- 安装名为 Remote - WSL 的扩展(应用市场)。
- 打开 WSL 终端。
- 在 WSL 终端中,切换到 PX4 文件夹:sh
cd ~/PX4-Autopilot - 在 WSL 终端中,启动 VS Code:sh
code .
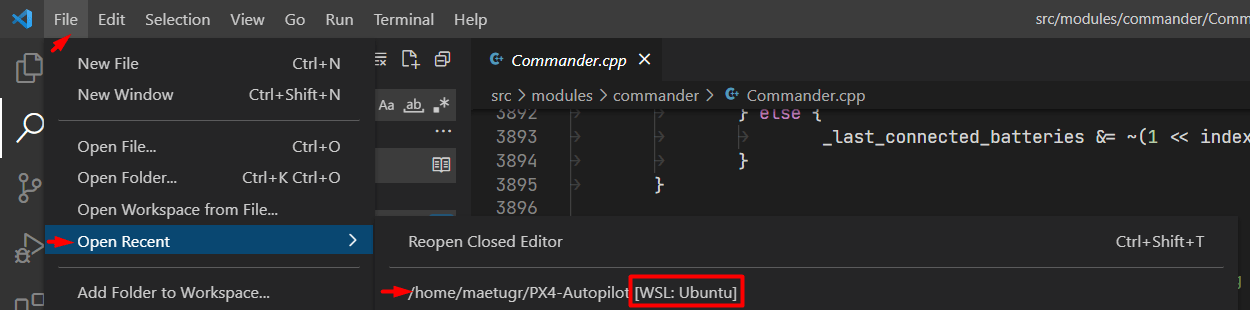
这将打开一个与 WSL 终端完全集成的 IDE。请确保始终以远程 WSL 模式打开 PX4 仓库。 7. 下次需要在 WSL2 中进行开发时,可以通过选择 “打开最近的项目”(如下所示)非常方便地以远程 WSL 模式再次打开。这将为你启动 WSL。
不过需要注意的是,WSL 虚拟机的 IP 地址会发生变化,因此无法使用 Windows 版 QGC 监控仿真环境(仍然可以使用 Linux 版 QGC 进行监控)。
QGroundControl
你可以在 WSL 或 Windows 中运行 QGroundControl 来连接正在运行的仿真环境。如果你需要 为飞行控制板刷入新固件,则只能使用 Windows 版的 QGroundControl。
WSL 中的 QGroundControl
设置和使用 QGroundControl 最简单的方法是将 Linux 版本下载到你的 WSL 中。
你可以在 WSL 终端中完成此操作。
- 在网页浏览器中,访问 QGC 的 Ubuntu 下载页面。
- 右键单击 QGroundControl.AppImage 链接,然后选择 “复制链接地址”。链接地址可能类似于 _https://d176td9ibe4jno.cloudfront.net/builds/master/QGroundControl.AppImage_。
- 打开 WSL 终端,并输入以下命令下载 AppImage 文件并使其可执行(请将
<复制的 AppImage URL>替换为实际的链接地址):shcd ~ wget <复制的 AppImage URL> chmod +x QGroundControl.AppImage - 运行 QGroundControl:sh
./QGroundControl.AppImage
QGroundControl 将启动并自动连接到正在运行的仿真环境,允许你监控和控制飞行器。
由于 WSL 不允许访问串行设备,因此无法使用它来安装 PX4 固件。
Windows 上的 QGroundControl
如果你想使用 PX4 中创建的固件更新硬件,请在 Windows 上安装 QGroundControl。
以下步骤介绍了如何连接到在 WSL 中运行的仿真环境:
- 打开 WSL 终端。
- 运行命令
ip addr | grep eth0检查 WSL 虚拟机的 IP 地址:sh$ ip addr | grep eth0 6: eth0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc mq state UP group default qlen 1000 inet 172.18.46.131/20 brd 172.18.47.255 scope global eth0
将 eth0 接口 inet 地址的第一部分复制到剪贴板。在本例中为:172.18.46.131。 3. 在 QGC 中,转到 Q > 应用程序设置 > 通信链接。 4. 添加一个名为 “WSL” 的 UDP 链接,指向上面复制的 IP 地址的 18570 端口。 5. 保存设置并连接。
INFO
每次 WSL 重启后,都需要更新 QGC 中的 WSL 通信链接(因为它会获取动态 IP 地址)。
刷写飞行控制板
必须使用 Windows 版 QGroundControl 来刷写自定义编译的 PX4 二进制文件。
INFO
WSL2 本身不提供对连接到计算机的串行/USB 设备(如 Pixhawk 飞行控制器)的直接访问。这意味着你无法将运行在 WSL2 内的 QGC 连接到飞行控制器以安装固件,也不能使用 upload 命令 在编译时上传固件。相反,你需要将 Windows 版 QGroundControl 连接到在 WSL2 中运行的 PX4 以及飞行控制器,以便上传固件。
要刷写在 WSL 中编译的自定义二进制文件,请执行以下步骤:
- 如果你还没有在 WSL 中编译二进制文件,可以使用 WSL 终端 并运行以下命令:sh
cd ~/PX4-Autopilot make px4_fmu-v5TIP
请为你的飞行控制板使用正确的
make目标。px4_fmu-v5可用于 Pixhawk 4 飞行控制板。
::: 2. 如果 Pixhawk 板已通过 USB 连接到计算机,请先断开 USB 电缆。 3. 打开 QGC 并导航到 Q > 飞行器设置 > 固件。 4. 通过 USB 连接你的 Pixhawk 板。 5. 连接成功后,选择 “PX4 飞行栈”,勾选 “高级设置”,然后从下方的下拉菜单中选择 “自定义固件文件 ...”。 6. 继续操作并选择你刚刚在 WSL 中编译的固件二进制文件。 在打开的对话框中,在左侧窗格中查找带有企鹅图标的 “Linux” 位置。该位置通常在最底部。选择路径为 Ubuntu\home\{你的 WSL 用户名}\PX4-Autopilot\build\{你的编译目标}\{你的编译目标}.px4 的文件。 ::: info 你可以将该文件夹添加到收藏夹,以便下次快速访问。 ::: 7. 开始刷写。 更多信息请参考 安装 PX4 主版本、测试版或自定义固件(加载固件)。
故障处理
如果你在设置过程中遇到任何问题,请查看当前的 Microsoft WSL 安装文档。
我们还建议你安装最新的 Windows GPU 驱动程序,并在 Ubuntu 环境中安装较新版本的 kisak mesa,以便模拟大多数 OpenGL 功能:
sudo add-apt-repository ppa:kisak/kisak-mesa
sudo apt update
sudo apt upgrade