使用Flight Review进行日志分析
通过Flight Review生成的飞行图表,可用于分析飞行器的整体状况。
这些图表通俗易懂,但要了解哪些数据范围是可接受的,以及图表应呈现何种形态,则需要一些经验。 本页面将介绍如何解读这些图表,并识别常见问题。
一般用法
许多图表都具备以下共同功能:
- 图表背景颜色:用于指示记录期间的飞行模式(部分图表会依赖飞行模式):
- 飞行模式:图表主体的背景颜色表示飞行模式。将鼠标悬停在图表上会显示飞行模式标签。
- VTOL飞行模式:对于VTOL飞行器,还会在图表底部以背景颜色显示VTOL模式(蓝色代表多旋翼,黄色代表固定翼,红色代表过渡阶段)。
- 鼠标滚轮缩放:在特定图表轴上滚动鼠标滚轮,可沿该轴(水平或垂直方向)缩放。在图表内滚动鼠标滚轮,则可同时缩放两个轴。
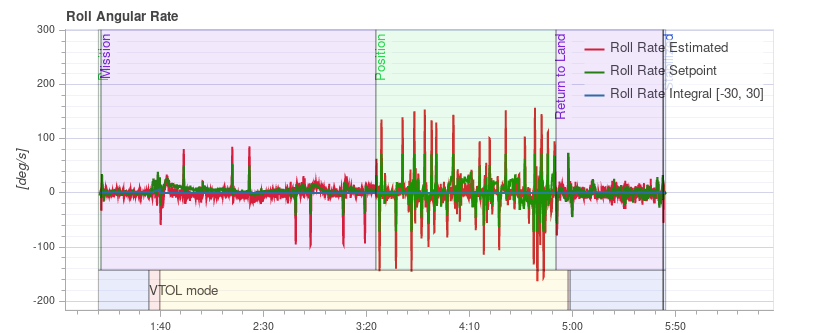
PID性能跟踪
根据飞行模式的不同,飞行器控制器可能会尝试跟踪位置、速度、高度或速率设定值(具体跟踪的设定值取决于模式,例如在稳定模式下没有速度设定值)。
估计值(红色线条)应与 设定值(绿色线条)紧密匹配。若不匹配,在大多数情况下,需要调整该控制器的PID增益。
多旋翼PID调参指南 包含示例图表,以及分析跟踪性能的相关信息。
:::提示 对于速率控制器,尤其建议启用高速率日志记录配置文件(SDLOG_PROFILE),以便在放大查看时获取更多细节。 :::
振动
振动是多旋翼飞行器最常见的问题之一。高振动水平可能导致:
- 飞行效率降低,飞行时间缩短。
- 电机温度升高。
- 材料磨损加剧。
- 飞行器难以精确调校,导致飞行性能下降。
- 传感器故障。
- 位置估计失败,可能导致飞行偏离。
因此,关注振动水平并在必要时改进设置非常重要。
振动水平明显过高时很容易察觉,通常来说,振动水平越低越好。然而,在 “一切正常” 和 “水平过高” 之间存在一个较宽泛的范围。这个范围取决于多个因素,包括飞行器尺寸——较大的飞行器具有较高的惯性,允许进行更多的软件滤波(同时,较大飞行器的振动频率较低)。
以下段落和章节将介绍用于检查振动水平的图表,以及如何分析这些图表。
:::提示 分析振动时,查看多个图表是很有必要的(不同图表能更好地突出某些问题)。 :::
FFT制动器控制
:::信息 您需要启用高速率日志记录配置文件(SDLOG_PROFILE)才能查看此图表。 :::
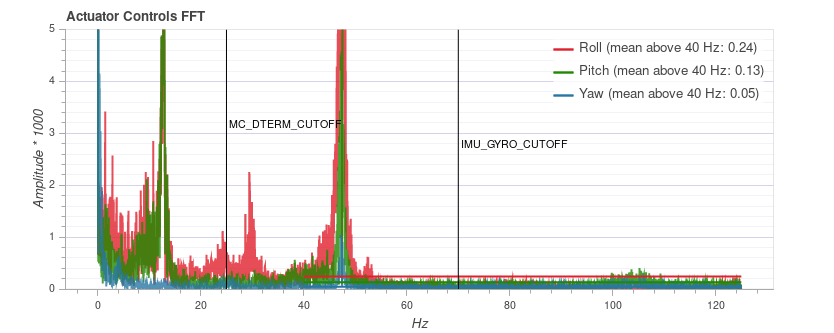
此图表基于执行器控制信号(速率控制器的PID输出),展示了横滚、俯仰和偏航轴的频率图。它有助于识别频率峰值,并配置软件滤波器。在最低端(约20Hz以下)应只有一个单一峰值,其余部分应较低且平稳。
请注意,不同飞行器的y轴比例不同,但同一飞行器的日志可直接相互比较。
良好振动示例
QAV-R 5" Racer 机架(振动极小)。
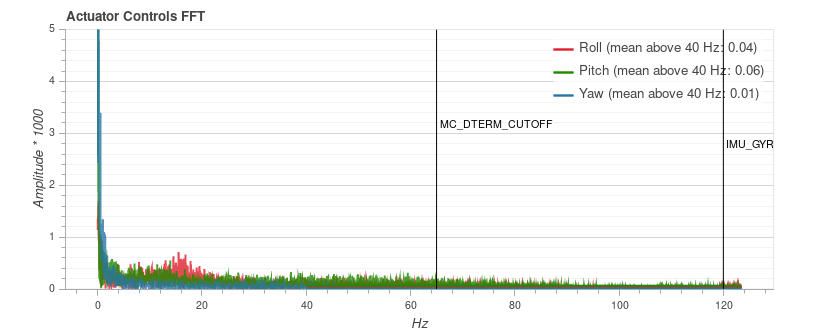
:::信息 上述机架出色的振动特性意味着,我们可以大幅提高软件滤波器 的截止频率(减少控制延迟)。 :::
DJI F450机架(振动良好)。
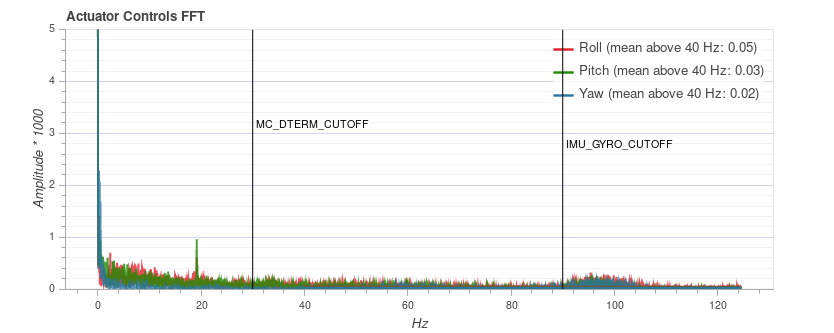
S500机架:
:::信息 虽然上图看起来不错,但同一飞行的原始加速度图 显示,x和y方向的振动水平略高。这很好地说明了为什么查看多个图表很有必要! :::
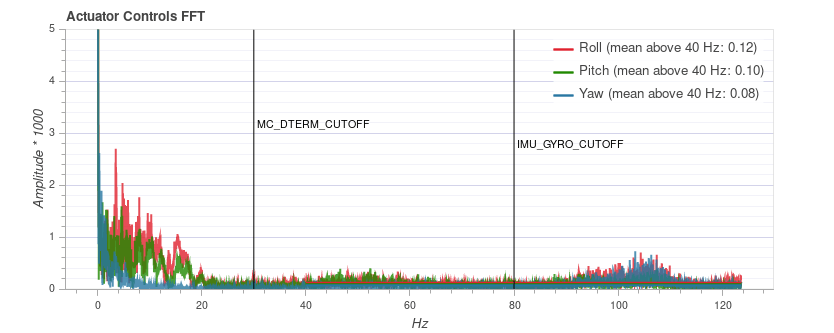
不良振动示例
此示例显示在接近50Hz处有一个频率峰值(在这种情况下,是由于起落架 “松动” 导致)。
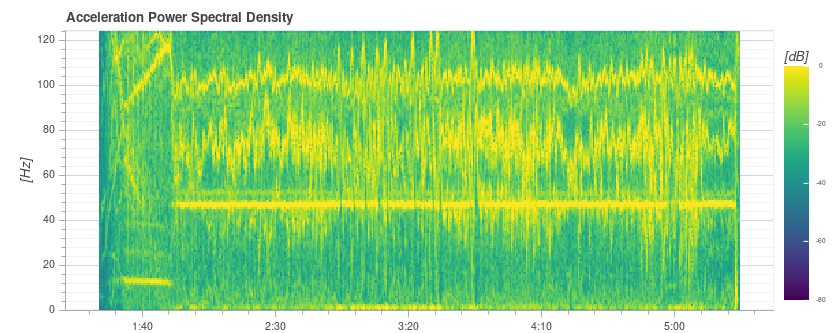
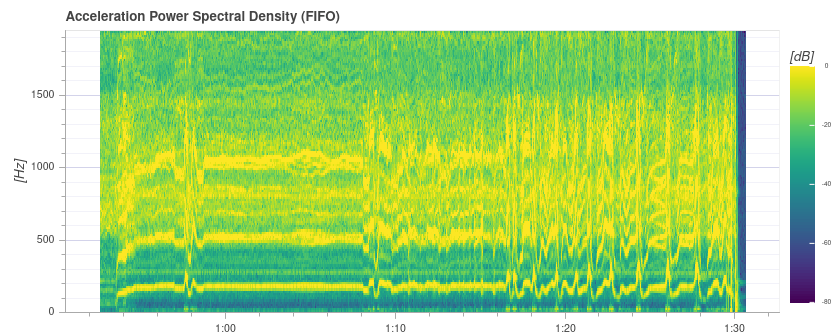
加速度功率谱密度
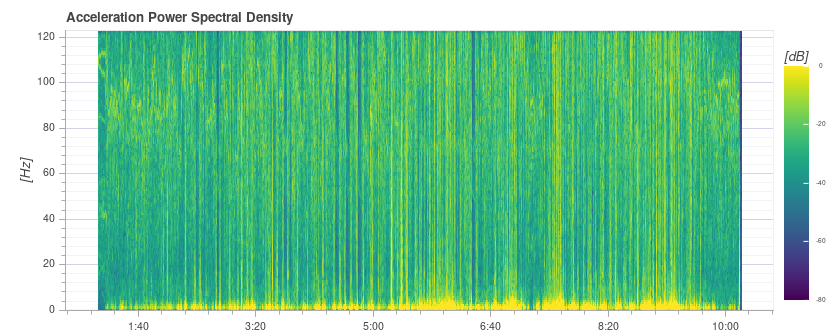
这是一个二维频率图,展示了原始加速度计数据随时间的频率响应(显示x、y和z轴的总和)。区域颜色越黄,表明该时刻和频率的频率响应越高。
理想情况下,只有几Hz以下的最低部分为黄色,其余部分大多为绿色或蓝色。
良好振动示例
QAV-R 5" Racer 机架(振动极小)。
DJI F450机架(振动良好)。 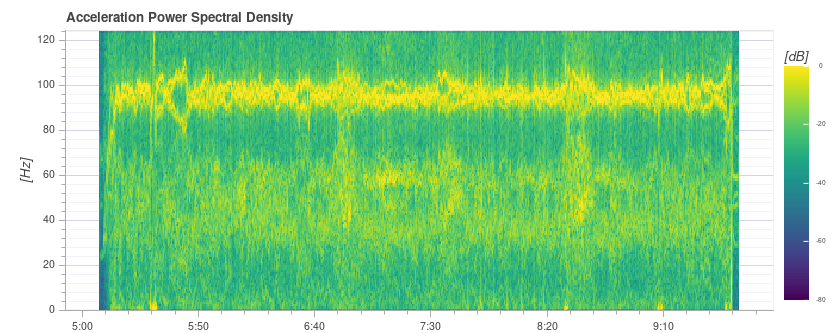
:::信息 从上图中,您可以看到螺旋桨的叶片通过频率约为100Hz。 :::
S500机架: 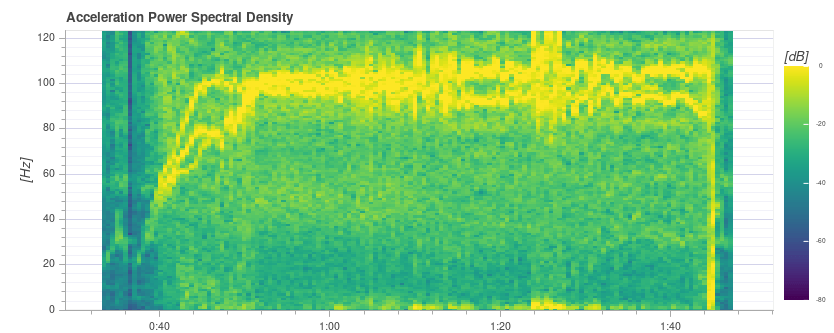
不良振动示例
在100Hz左右的强烈黄色线条表明可能存在问题,需要进一步调查(首先查看其他图表)。
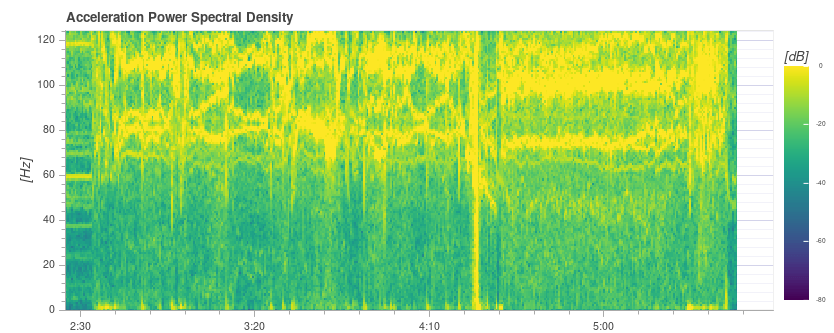
下图显示在接近50Hz处有一个频率峰值(在这种情况下,是由于起落架 “松动” 导致)。
:::提示 这表明可能存在问题,因为这是一个接近飞行器动力学的强单低频。在默认80Hz的滤波器设置下,50Hz的振动将无法被过滤。 :::
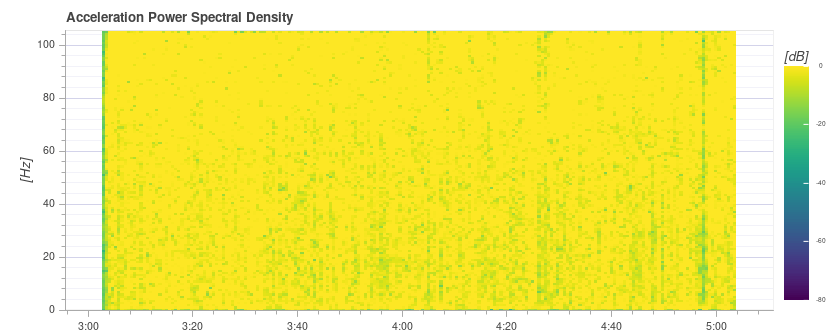
极高(不安全)的振动!请注意,图表几乎完全为黄色。
:::警告 如此高的振动水平下,请勿飞行。 :::
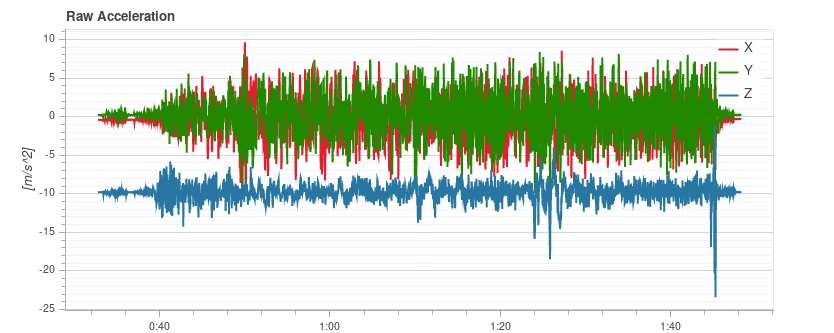
原始加速度
此图表展示了x、y和z轴的原始加速度计测量值。理想情况下,每条线都应较细,且能清晰显示飞行器的加速度。
一般经验法则是,如果在悬停或缓慢飞行时,z轴图表与x/y轴图表相交,则振动水平过高。
:::提示 使用此图表的最佳方法是稍微放大飞行器悬停的部分。 :::
良好振动示例
QAV-R 5" Racer 机架(振动极小)。

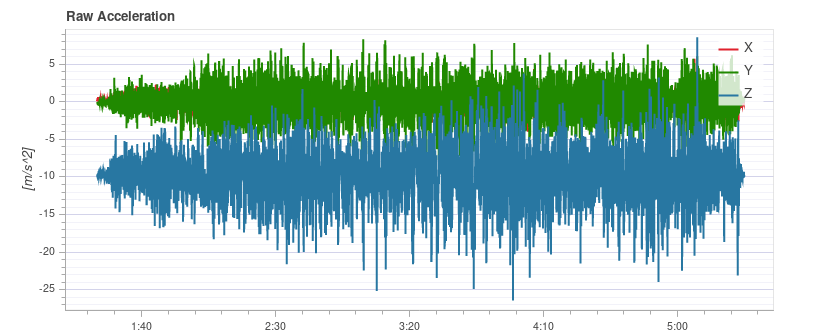
DJI F450机架(振动良好)。 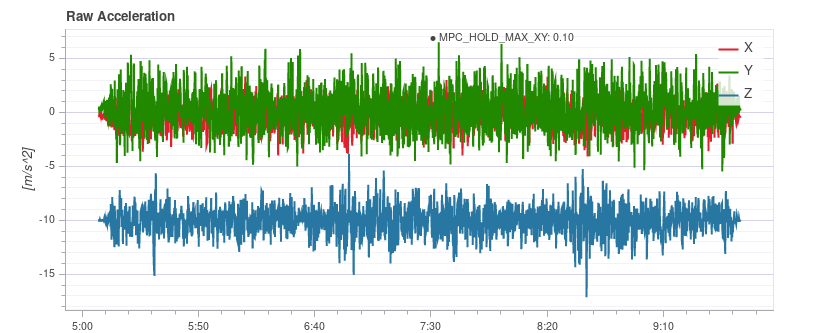
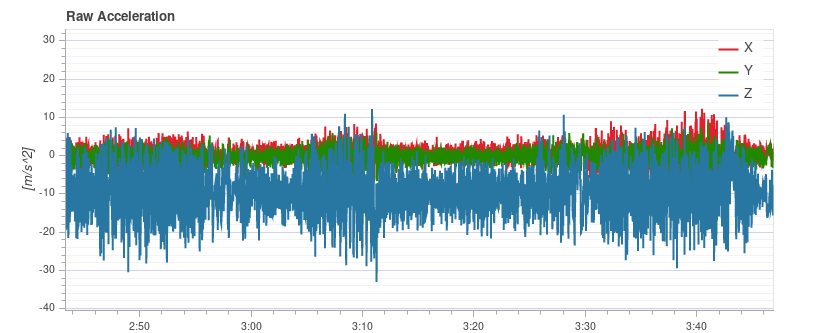
不良振动示例
S500机架。振动水平接近临界值——x和y方向略高(这是S500机身的典型情况)。这是开始对飞行性能产生负面影响的极限。
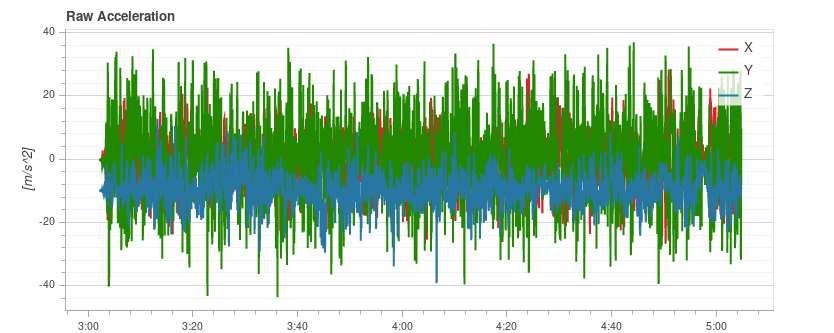
振动过高。请注意z轴图表与x/y轴图表的重叠情况:
振动水平过高。请注意z轴图表与x/y轴图表的重叠情况:
非常高(不安全)的振动水平。
:::警告 如此高的振动水平下,请勿飞行。 :::
原始高速率IMU数据图表
为进行深入分析,可选择以全速率(几千赫兹,取决于IMU)记录原始IMU数据。这使得能够检查比常规记录更高的频率,有助于选择振动隔离装置或适当配置低通和陷波滤波器。
要使用此功能,需要更改一些参数:
将IMU_GYRO_RATEMAX 设置为400。这可确保原始传感器数据从传感器传输到系统其他部分时,打包更高效,并减小日志大小(同时不减少有用数据)。
使用优质SD卡,因为IMU数据记录需要较高带宽(如果记录速率过高,Flight Review会显示丢包情况)。
:::提示 有关常见SD卡的比较,见日志记录 > SD卡。 :::
在SDLOG_PROFILE 中启用陀螺仪或加速度计高速率FIFO配置文件,并禁用其他条目。如果使用的是非常优质的SD卡(几乎无丢包情况),则可以:
- 同时启用加速度计和陀螺仪配置文件。
- 或启用加速度计/陀螺仪配置文件,以及默认日志记录配置文件。
示例图表:
:::信息 记录的是第一个IMU的数据,这不一定与用于飞行的IMU相同。仅在IMU安装方式不同的情况下(例如硬安装与软安装),这一点才较为重要。 :::
:::信息 测试完成后,别忘了恢复参数。 :::
解决振动问题
通常,仅通过日志无法确定振动源(或多个振动源的组合)。
在这种情况下,应检查飞行器。振动隔离 介绍了一些可检查(及采取)的基本措施,以降低振动水平。
制动器输出
“执行器输出” 图表显示发送到各个执行器(电机/舵机)的信号。通常,该信号范围在配置的PWM最小值和最大值之间(例如1000到2000)。
这是一个四旋翼飞行器一切正常的示例(所有信号都在范围内,大致相互重叠,且噪声不大): 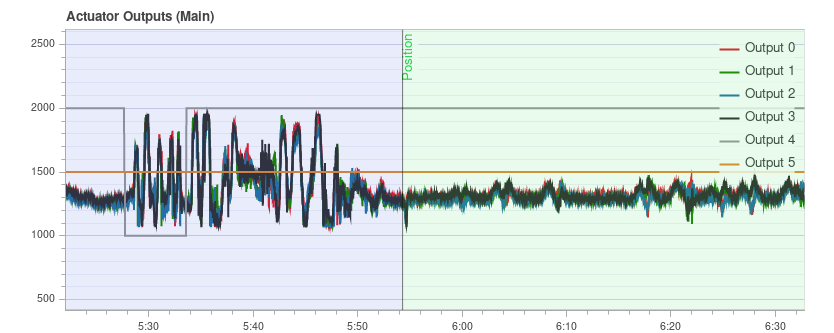
该图表可帮助识别不同问题:
如果一个或多个信号长时间处于最大值,意味着控制器进入 饱和 状态。这不一定是问题,例如在全速飞行时,这是预期情况。但如果在任务中出现这种情况,则表明飞行器超重,无法提供足够推力。
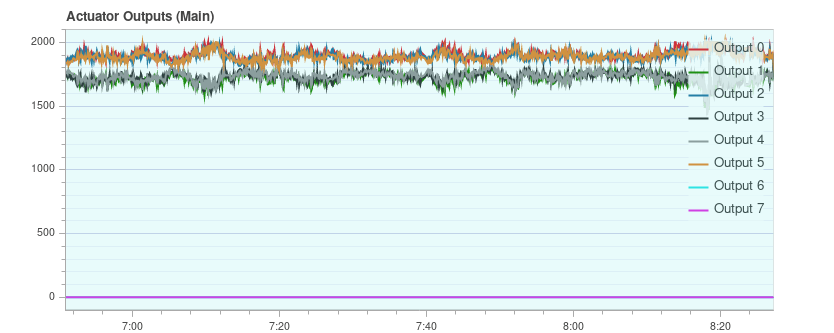
对于多旋翼飞行器,该图表可很好地指示飞行器是否 不平衡。在图表中表现为,一个或多个相邻电机(四旋翼情况下为两个)平均需要以更高推力运行。请注意,如果某些电机提供的推力大于其他电机,或者电调未校准,也可能出现这种情况。不平衡的飞行器通常不是大问题,因为自动驾驶仪会自动调整。然而,这会降低最大可实现推力,并给部分电机带来更大压力,因此最好使飞行器保持平衡。
不平衡也可能来自偏航轴。此情况与前一种类似,但相反的电机将分别运行得更高或更低。原因可能是一个或多个电机倾斜。
这是一个六旋翼飞行器的示例:电机1、3和6以更高推力运行:
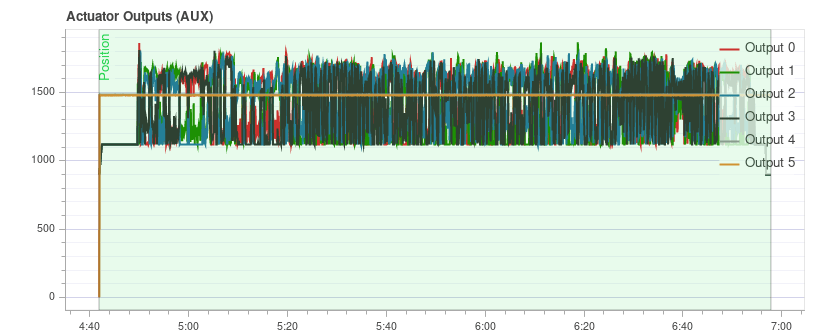
如果信号看起来非常 嘈杂(振幅较高),可能有两个原因:传感器噪声、振动通过控制器传递(在其他图表中也会显示,见上一节)或PID增益过高。
这是一个极端示例:
GPS不确定性
“GPS不确定性” 图表显示来自GPS设备的信息:
- 使用的卫星数量(应约为或超过12颗)。
- 水平位置精度(应小于1米)。
- 垂直位置精度(应小于2米)。
- GPS定位类型:3表示3D GPS定位,4表示GPS + 航位推算,5表示RTK浮点解,6表示RTK固定解。
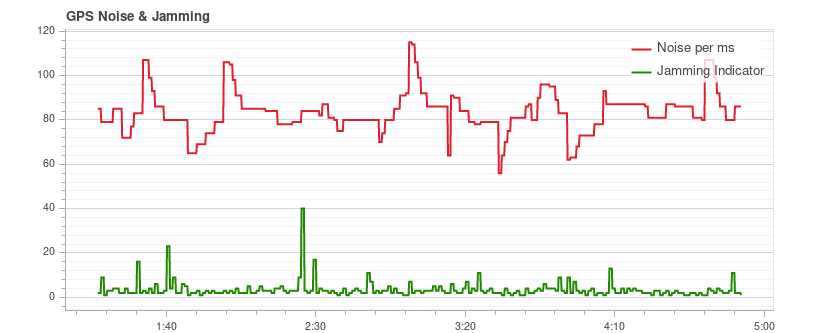
GPS噪声与干扰
“GPS噪声与干扰” 图表有助于检查GPS信号干扰和阻塞情况。GPS信号非常微弱,因此很容易受到通过电缆传输或在GPS使用频率上辐射的组件干扰/阻塞。
:::提示 已知USB 3是有效的GPS干扰源。 :::
干扰指示器 应在40左右或以下。80左右或更高的值过高,必须检查设置。信号干扰还表现为精度降低和卫星数量减少,直至无法实现GPS定位。
这是一个无任何干扰的示例:
推力和磁场
“推力和磁场” 图表显示推力和磁传感器测量向量的模。
该模在整个飞行过程中应保持恒定,且与推力无关。这是一个模非常接近恒定的良好示例: 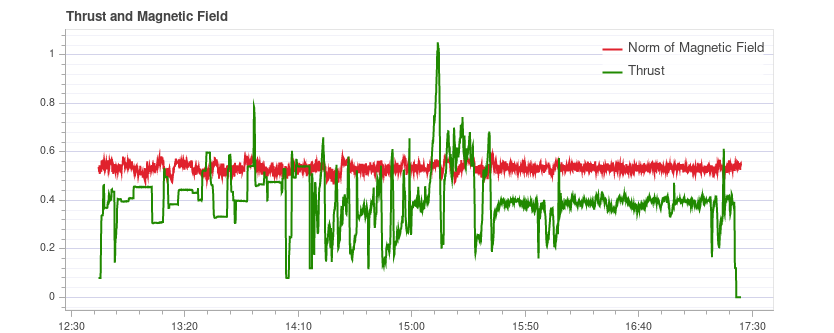
如果两者相关,意味着电机(或其他用电设备)消耗的电流正在影响磁场。必须避免这种情况,因为这会导致偏航估计错误。以下图表显示了推力与磁力计模之间的强相关性: 
解决方法如下:
- 使用外部磁力计(避免使用内部磁力计)。
- 如果使用外部磁力计,将其移到离强电流较远的地方(例如,使用(较长的)GPS天线)。
如果模不相关但不恒定,很可能是未正确校准。然而,这也可能是由于外部干扰(例如在金属结构附近飞行)。
此示例表明模不恒定,但与推力不相关: 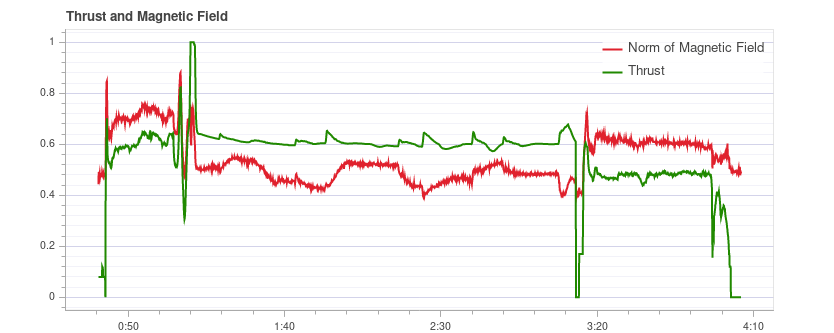
估计器看门狗
“估计器看门狗” 图表显示估计器的健康报告。该值应始终为零。
如果没有问题,图表应如下所示: 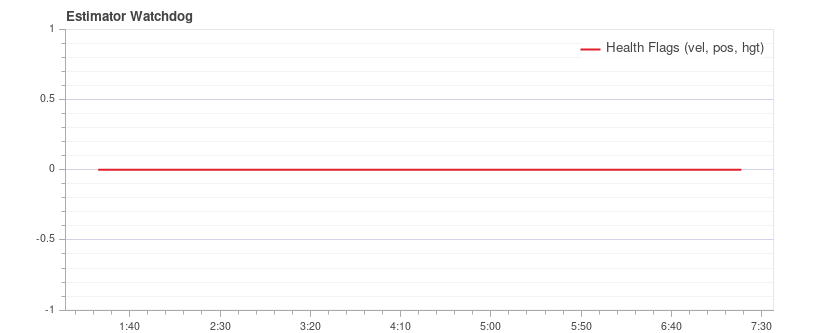
如果其中一个标志不为零,则估计器检测到问题,需要进一步调查。大多数情况下,这是传感器问题,例如磁力计干扰。查看相应传感器的图表通常会有所帮助。
这是一个磁力计有问题的示例: 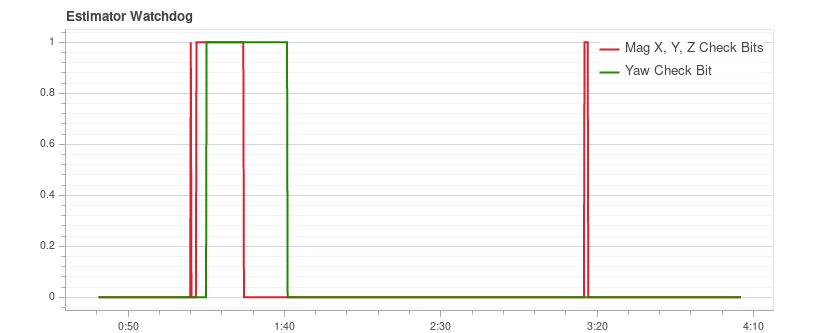
传感器数据的采样规律性
采样规律性图表可深入了解日志记录系统和调度方面的问题。
如果日志缓冲区过小、记录速率过高或使用低质量SD卡,日志丢包 数量会开始增加。
:::信息 中等质量的SD卡偶尔出现丢包情况是正常的。 :::
时间间隔 显示两个记录的IMU样本之间的时间差。由于数据发布速率为250Hz,该值应接近4毫秒。如果出现该值倍数的尖峰