(已弃用)探测车位置控制
PX4 支持采用 阿克曼转向和差速转向 的探测车(无人地面车辆 - UGVs)。
本节包含了多种无人地面车辆机架的组装和配置的构建日志/说明。
探测车类型
PX4 支持以下类型的探测车:
差速转向:通过使左右两侧车轮以不同速度转动来控制方向。 这种转向方式通常用于推土机、坦克和其他履带式车辆。
阿克曼转向:通过将车轮指向行驶方向来控制方向(阿克曼转向几何原理 可补偿转弯时内侧和外侧车轮转动速度不同的情况)。 这种转向方式用于大多数商用车辆,包括轿车、卡车等。
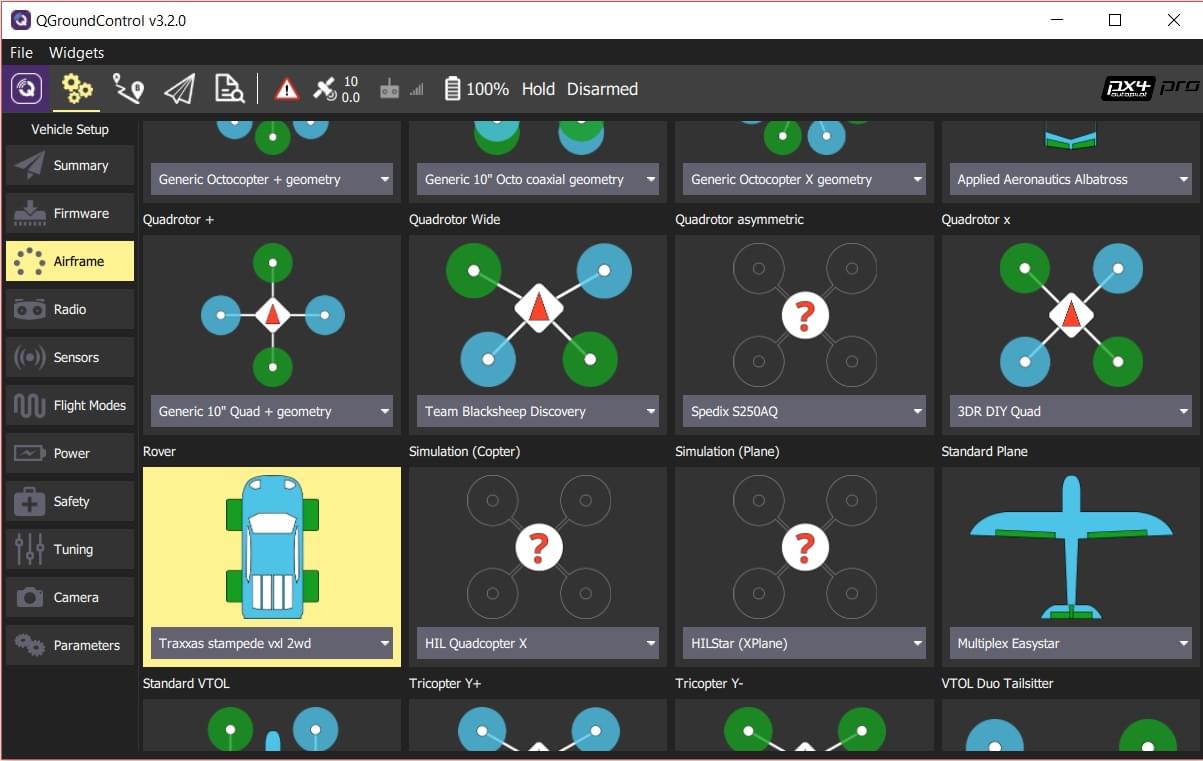
支持的机架可在 机架参考 > 探测车 中查看:这些机架如 “通用地面车辆(已弃用)” 等,其名称中包含 “(已弃用)”。
如何配置探测车
阿克曼转向配置
设置采用阿克曼转向的探测车非常简单:
差速转向配置
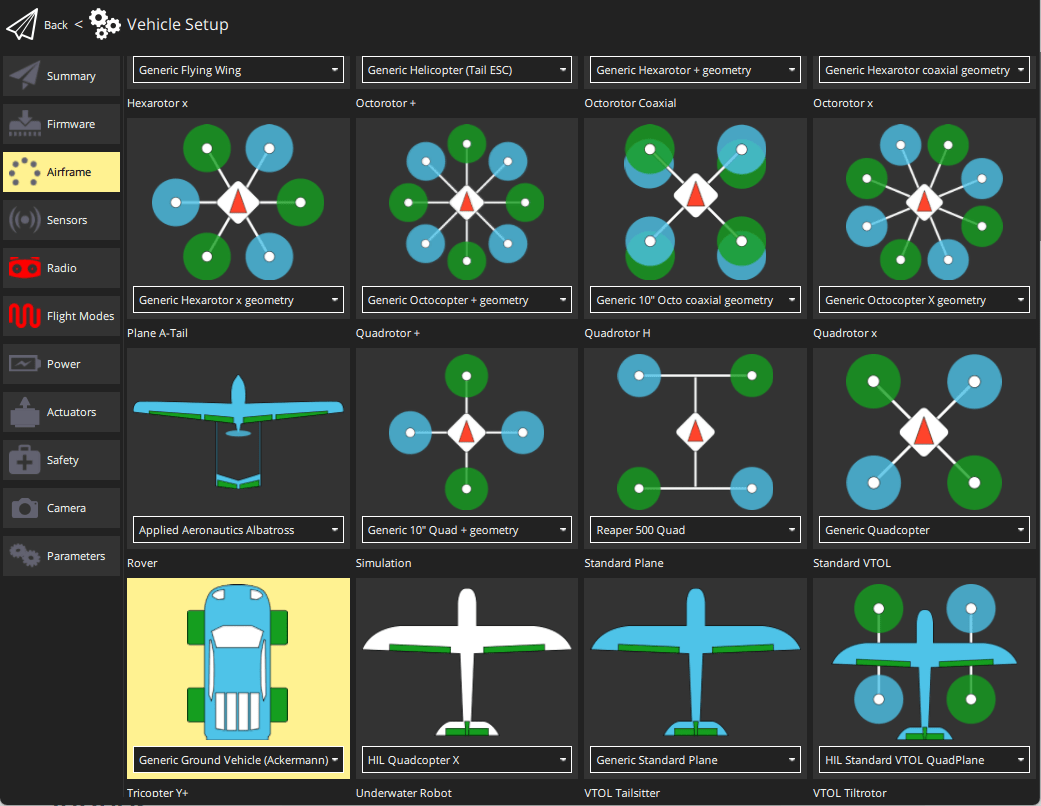
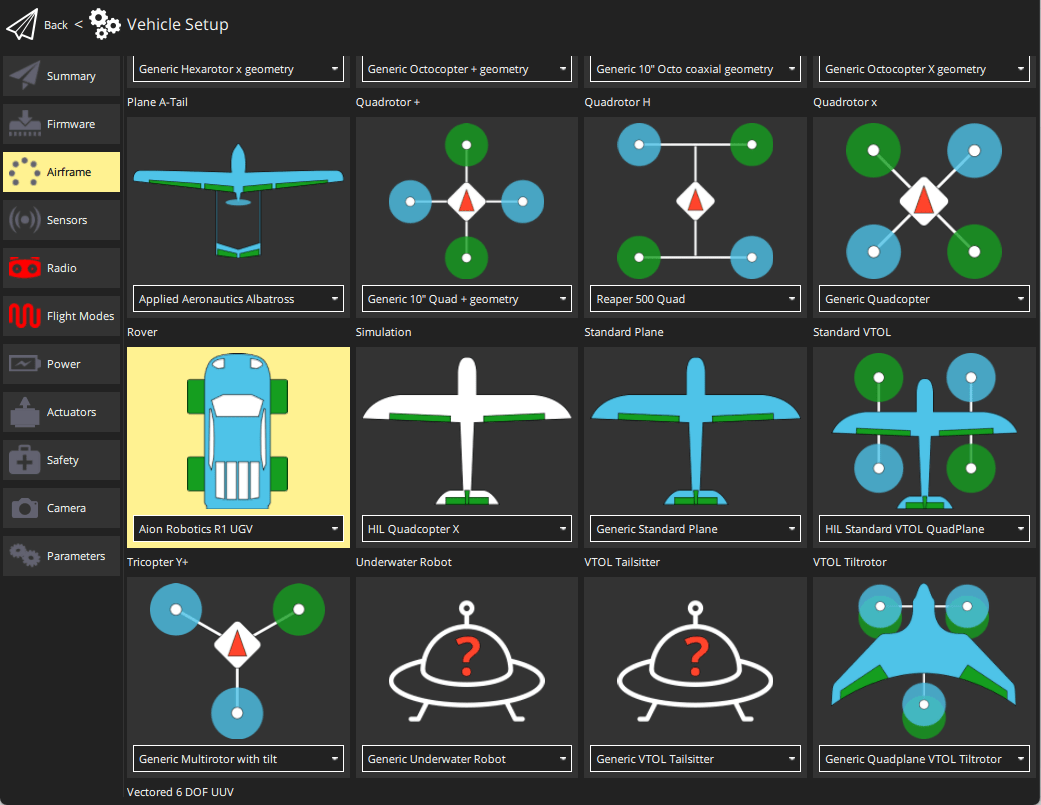
在 机架 配置中,选择 “Aion Robotics R1 UGV” 或 “NXP 杯赛车:DF Robot GPX(已弃用)”。
选择 “应用并重启” 按钮。
打开 执行器配置与测试,将左右电机功能映射到飞行控制器的输出端。
仿真
Gazebo Classic 仿真器 为两种转向类型提供了仿真:
- 阿克曼转向:阿克曼转向无人地面车辆
- 差速转向:R1 探测车
驾驶模式(探测车)
飞行模式(对于地面车辆而言,更准确地说是 “驾驶模式”)提供自动驾驶仪支持,以便更轻松地手动驾驶车辆、执行自主任务,或将控制权交给外部系统。
使用已弃用的探测车位置控制模块的 PX4 地面车辆仅支持 手动模式、任务模式 和 外置模式(地面站可能会提供其他模式,但这些模式的行为都与手动模式类似)。
手动模式
“手动模式” 是 PX4 地面车辆唯一的手动模式,需要手动控制器(遥控器、游戏手柄、操纵杆等)。
在这种模式下,当遥控器控制摇杆处于中心位置时,电机会停止运转。 要移动车辆,需将摇杆从中心位置向外移动。
一旦释放摇杆,它们将会返回中心停顿区。 这将关闭电机并使车轮回正。 由于没有主动刹车,车辆可能会继续移动,直到其动量消散。
任务模式
“任务模式” 是一种自动模式,它会使车辆执行已上传到飞行控制器的预定义自主 任务 计划。 任务通常是使用地面控制站(GCS)应用程序(如 QGroundControl)创建并上传的。
外置模式
外置模式 会使车辆服从通过 MAVLink 提供的位置、速度或姿态设定点。 并非所有设定点类型对地面车辆都有意义或都受支持。
INFO
此模式旨在通过伴飞计算机和地面站进行车辆控制!
更多信息
- 基本配置 > 飞行模式 - 如何将遥控器控制开关映射到特定的飞行模式
- 多旋翼飞行器的飞行模式
- 固定翼飞行器的飞行模式
- 垂直起降飞行器的飞行模式
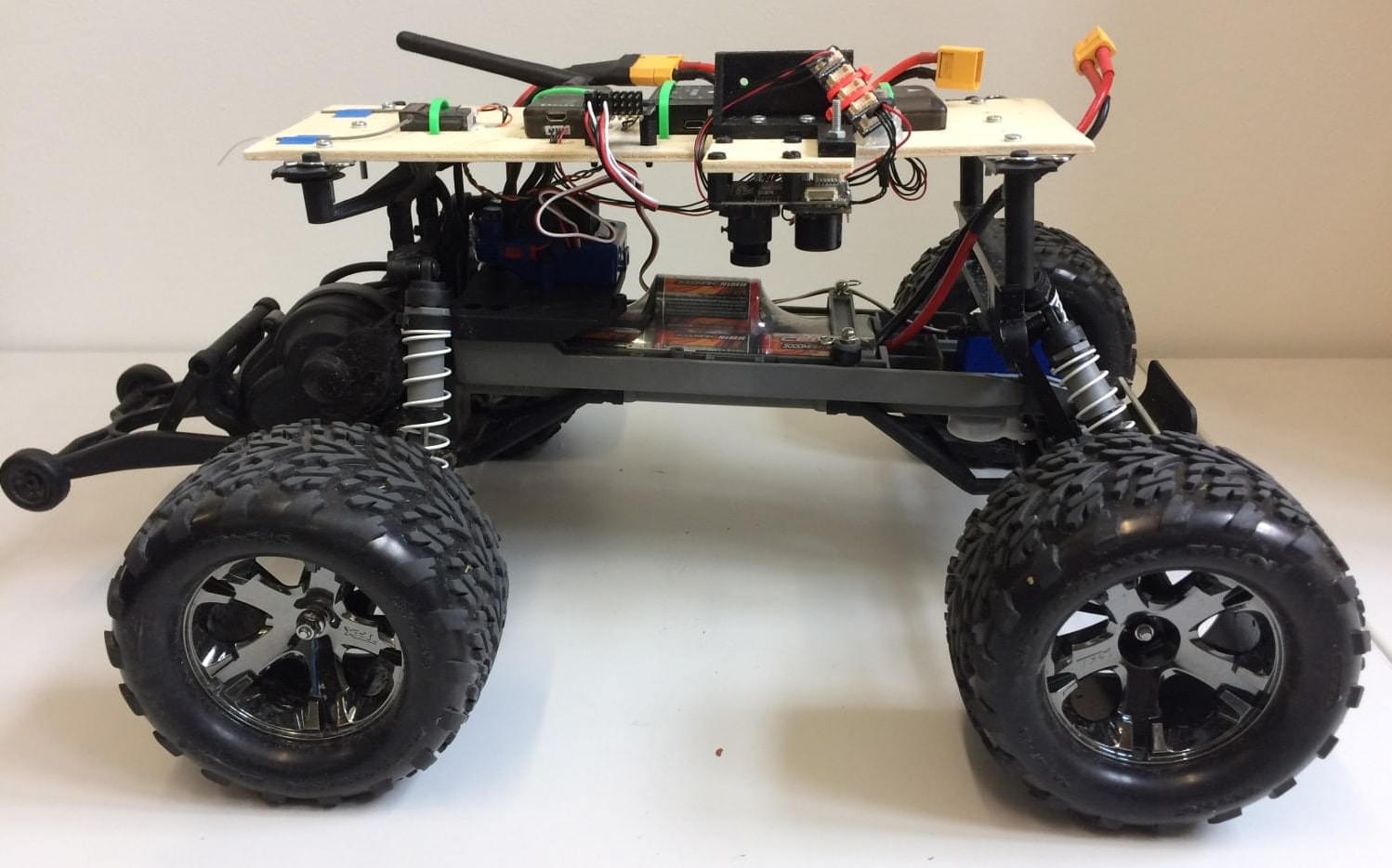
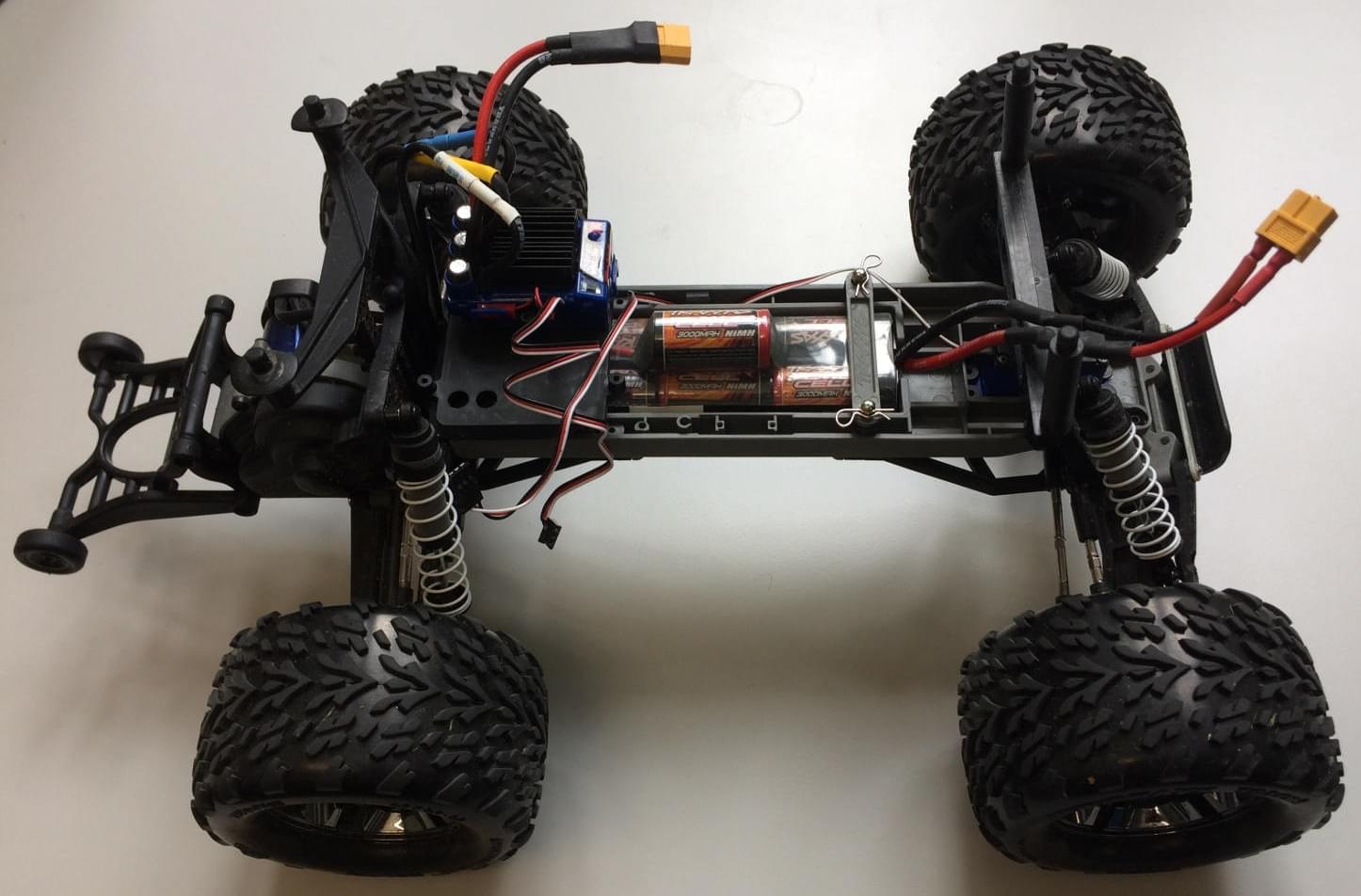
特拉克斯(Traxxas)Stampede VXL 探测车
选择这款车辆是为了了解如何将 Pixhawk 用于轮式平台。 我们选择特拉克斯(Traxxas)的车辆,是因为它们非常受欢迎,并且在遥控模型车领域是一个非常知名的品牌。 我们的想法是开发一个平台,通过自动驾驶仪能够轻松控制轮式无人地面车辆。

配件列表
- 特拉克斯(Traxxas)Stampede 探测车 除了顶部塑料盖外,其余部件都可使用。
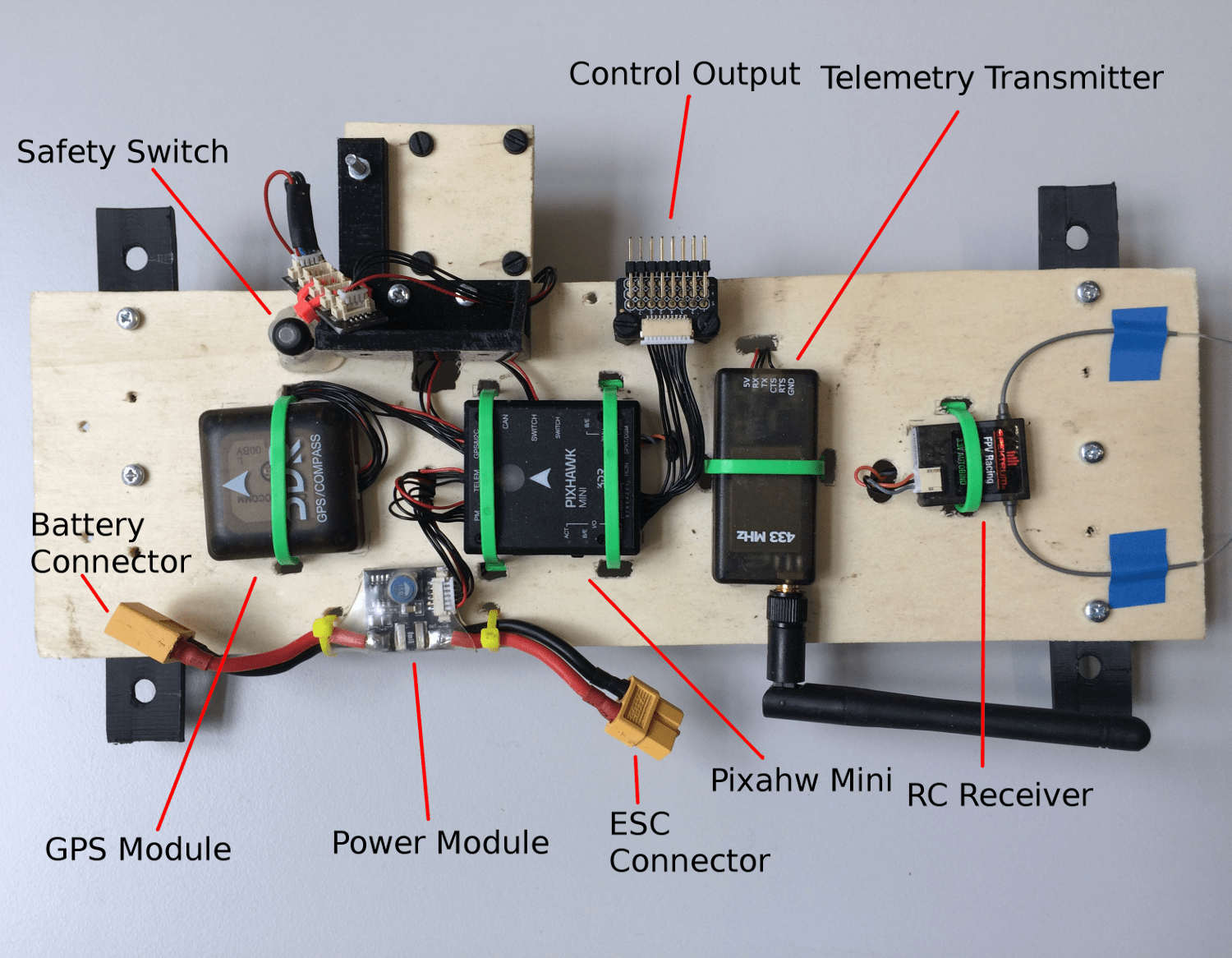
- Pixhawk Mini 飞控(已停产)
- 3DR 10S 电源模块
- 3DR 433MHz 遥测模块(欧洲版)
- Spektrum Dxe 控制器 或其他兼容 PX4 的遥控器
- Spektrum 四路竞赛串行接收器(带分集功能)
- PX4Flow 光流传感器(已弃用)
组装
组装时使用了一个木质框架,所有自动驾驶仪部件都安装在上面。 测试表明,应使用更好的隔振措施,尤其是对于 Pixhawk 飞控和光流模块。
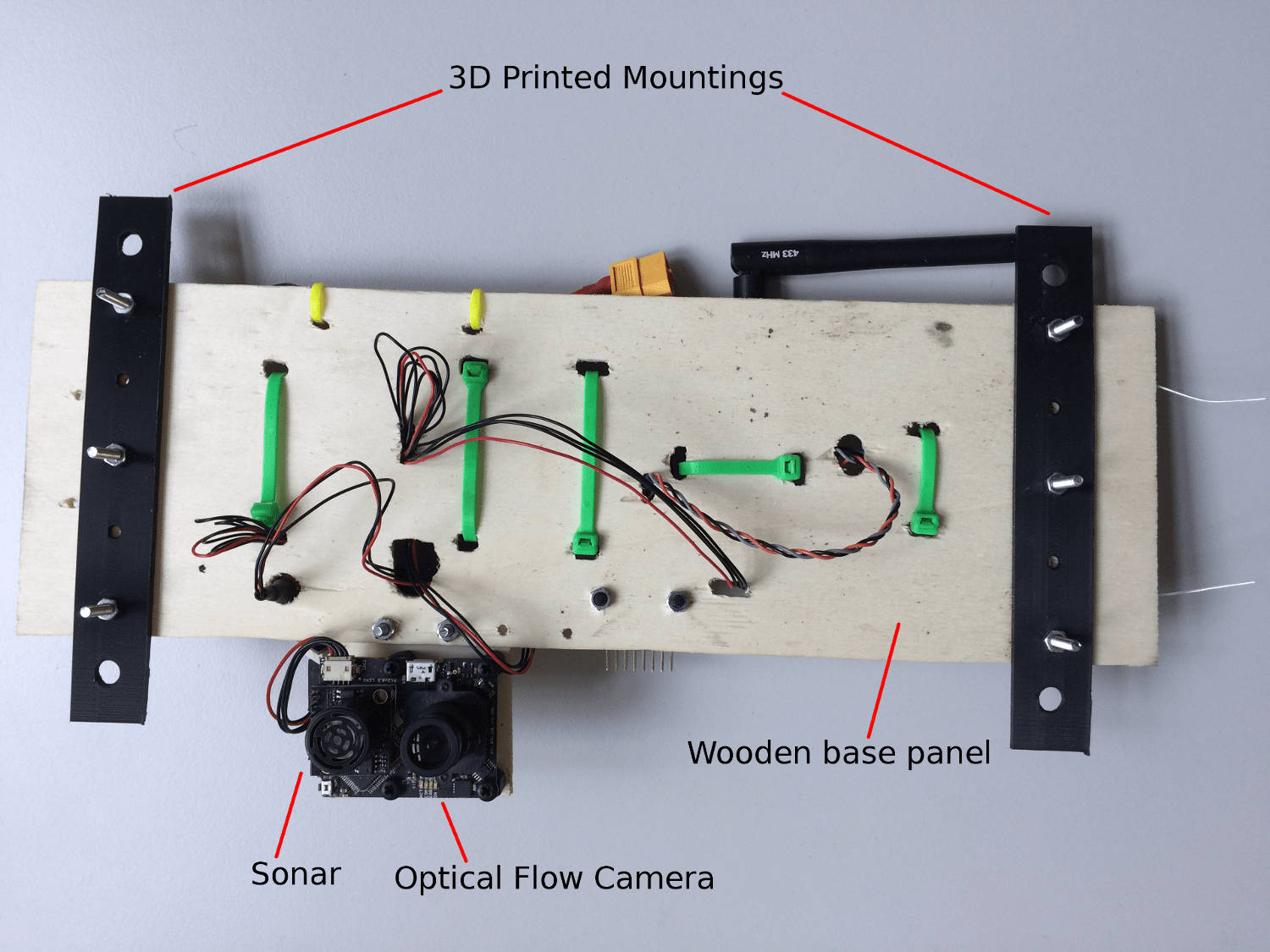

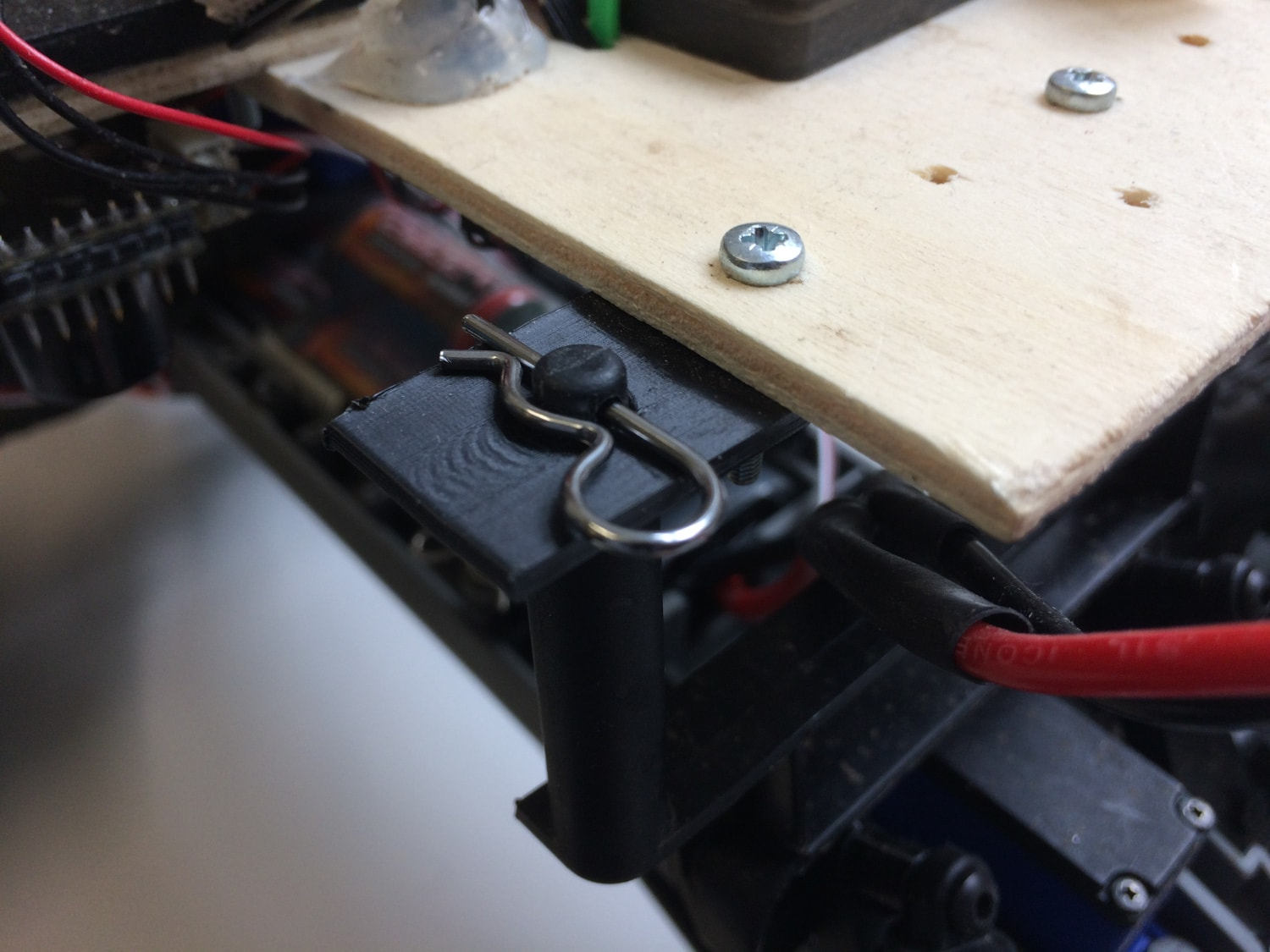
对于这种特定的安装方式,我们选择使用探测车附带的夹子来固定上板。 为此,3D 打印了两个支架。 CAD 文件可在 此处 获得。
WARNING
强烈建议 将电子调速器(ESC)设置为训练模式(请参阅特拉克斯(Traxxas)Stampede 探测车手册),这会将功率降低到 50%。
输出连接
| PWM 输出 | 执行器 |
|---|---|
| MAIN2 | 转向舵机 |
| MAIN4 | 油门(电子调速器输入) |
配置
使用 QGroundControl 配置探测车的方式与配置其他任何车辆的方式相同。
探测车的主要特定配置是设置正确的机架:
用法
目前,当连接遥控器时,PX4 仅支持任务模式和手动模式。 要使用任务模式,首先使用 QGC 向车辆上传新任务。然后,在 解锁 之前,选择 “任务模式(MISSION)”,然后进行解锁操作。
WARNING
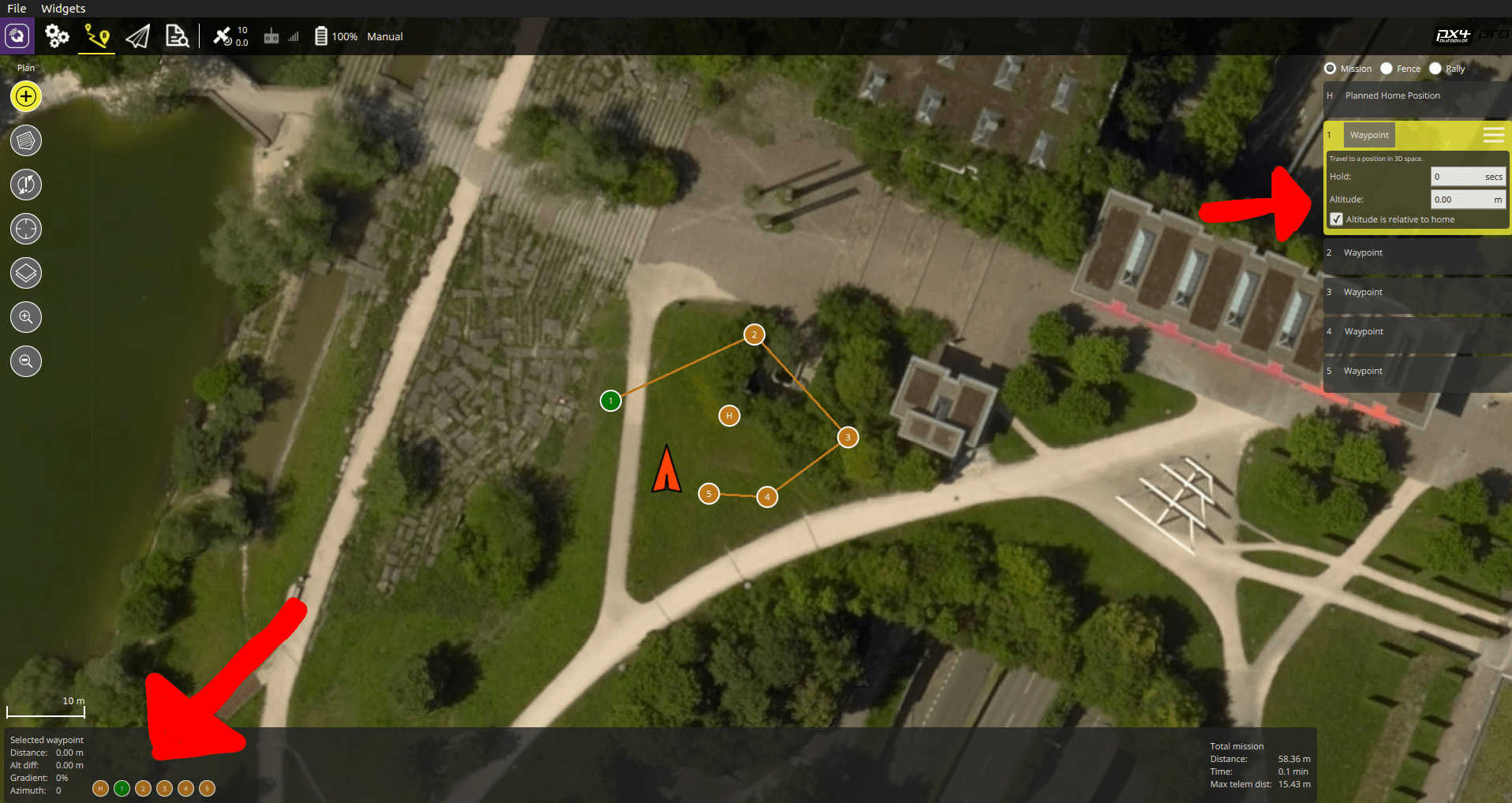
非常重要的是,创建的任务应 仅 由普通航点组成(即没有起飞航点等),并且为了正确执行任务,将 每个 航点的高度都设置为 0 至关重要。 如果不这样做,探测车将围绕某个航点持续旋转。
正确的任务设置如下所示: