蓝鳍机器人 BlueROV2(无人水下航行器)
适用于 PX4 v1.12BlueROV2 是一款价格亲民的高性能水下航行器,非常适合用于检查、科研以及探险活动。
PX4 为一种 8 推力矢量配置(即所谓的 “BlueROV2 重载配置”)提供 实验性支持。

购买渠道
电机映射/接线
必须按照 BlueRobotics 为该水下航行器提供的标准说明,将电机连接到飞行控制器上。
然后,该航行器将与 机架参考文档 中记录的配置相匹配:

- MAIN1:电机 1,逆时针旋转,船首右舷水平方向,螺旋桨逆时针旋转
- MAIN2:电机 2,逆时针旋转,船首左舷水平方向,螺旋桨逆时针旋转
- MAIN3:电机 3,逆时针旋转,船尾右舷水平方向,螺旋桨顺时针旋转
- MAIN4:电机 4,逆时针旋转,船尾左舷水平方向,螺旋桨顺时针旋转
- MAIN5:电机 5,逆时针旋转,船首右舷垂直方向,螺旋桨逆时针旋转
- MAIN6:电机 6,逆时针旋转,船首左舷垂直方向,螺旋桨顺时针旋转
- MAIN7:电机 7,逆时针旋转,船尾右舷垂直方向,螺旋桨顺时针旋转
- MAIN8:电机 8,逆时针旋转,船尾左舷垂直方向,螺旋桨逆时针旋转
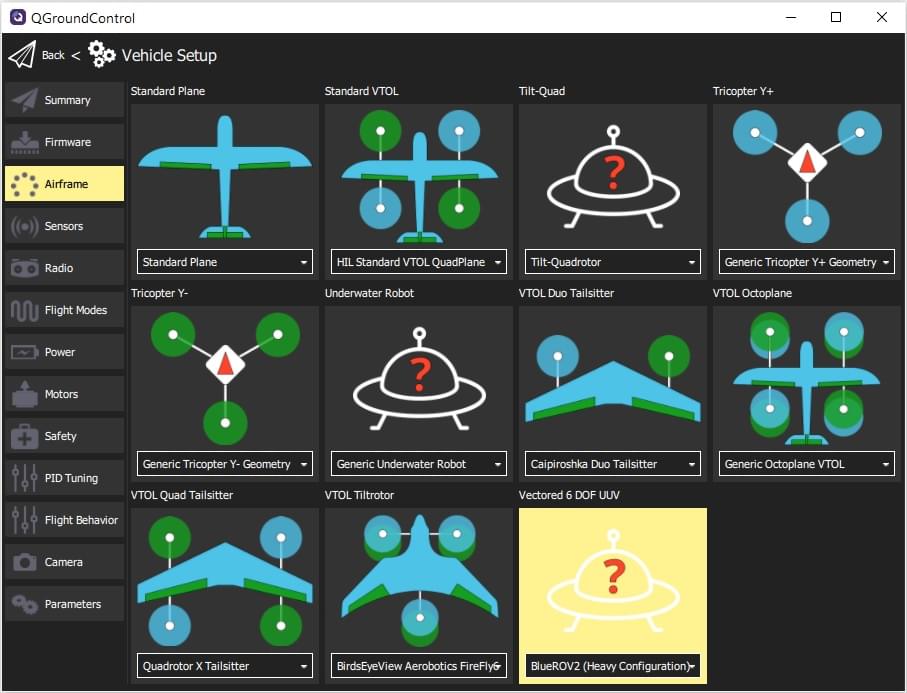
机架配置
BlueROV2 出厂时未安装 PX4 系统。 你需要进行以下操作: