3DR Pixhawk 1飞行控制器(已停产)
WARNING
此飞行控制器已停产,不再进行商业销售。 你可以使用mRo Pixhawk作为直接替代品。
WARNING
PX4不生产此款(或任何一款)自动驾驶仪。 若有技术支持或合规性问题,请联系制造商。
“3DR Pixhawk® 1”自动驾驶仪是一款广受欢迎的通用飞行控制器,基于Pixhawk项目的FMUv2开源硬件设计(它整合了PX4FMU和PX4IO的功能)。它在NuttX操作系统上运行PX4。

这里提供了与PX4配合使用的组装/设置说明:Pixhawk接线快速入门
主要特性
- 主片上系统:STM32F427
- CPU:180MHz的ARM®Cortex®M4,带有单精度浮点运算单元(FPU)
- 随机存取存储器(RAM):256KB SRAM(L1)
- 故障安全片上系统:STM32F100
- CPU:24MHz的ARM Cortex M3
- 随机存取存储器(RAM):8KB SRAM
- 无线功能:外部ESP8266
- 全球定位系统(GPS):u - blox® 7/8(Hobbyking®)/ u - blox 6(3D Robotics)
- 光流传感器:PX4 Flow单元
- 冗余电源输入和自动故障切换
- 外部安全开关
- 多色LED主视觉指示器
- 高功率、多音压电音频指示器
- 微型SD卡,用于长时间高速率数据记录
连接
- 1个集成电路总线(I2C)
- 1个控制器局域网(CAN,2个可选)
- 1个模拟数字转换器(ADC)
- 4个通用异步收发传输器(UART,2个带流控制)
- 1个控制台
- 8个带手动超控的脉冲宽度调制(PWM)
- 6个PWM / 通用输入输出(GPIO)/ PWM输入
- S.BUS / PPM / Spektrum输入
- S.BUS输出
购买渠道
该控制板最初由3DR®制造,是PX4®的原始标准微控制器平台。虽然3DR已不再生产此板,但你可以使用mRo Pixhawk作为直接替代品。
从以下渠道订购mRo Pixhawk:
- 基础版 - 仅控制板(可作为3DR Pixhawk的替代品)
- mRo Pixhawk 2.4.6基础套件 - 包含除遥测电台外的所有部件
- mRo Pixhawk 2.4.6酷炫套件(限量版) - 包含你所需的所有部件,包括遥测电台
产品规格
处理器
- 32位STM32F427 Cortex - M4F内核,带浮点运算单元(FPU)
- 168MHz
- 256KB随机存取存储器(RAM)
- 2MB闪存(Flash)
- 32位STM32F103故障安全协处理器
传感器
- ST Micro L3GD20H 16位陀螺仪
- ST Micro LSM303D 14位加速度计/磁力计
- Invensense MPU 6000 3轴加速度计/陀螺仪
- MEAS MS5611气压计
接口
- 5个通用异步收发传输器(UART,串口),其中一个具备高功率能力,2个带硬件流控制
- 2个控制器局域网(CAN,一个带有内部3.3V收发器,一个在扩展接口上)
- 兼容Spektrum DSM / DSM2 / DSM - X®卫星输入
- 兼容Futaba S.BUS®输入和输出
- PPM总和信号输入
- 信号强度指示(RSSI,PWM或电压)输入
- 集成电路总线(I2C)
- 串行外设接口(SPI)
- 3.3V和6.6V模拟数字转换器(ADC)输入
- 内部微型USB端口和外部微型USB端口扩展
电源系统与保护
- 理想二极管控制器,具备自动故障切换功能
- 伺服导轨高功率(最大10V)和大电流(10A +)就绪
- 所有外设输出过流保护,所有输入静电放电(ESD)保护
额定电压
如果提供三个电源,Pixhawk可实现电源三重冗余。这三个电源轨分别是:电源模块输入、伺服导轨输入、USB输入。
正常运行最大额定值
在这些条件下,所有电源将按以下顺序为系统供电:
- 电源模块输入(4.8V至5.4V)
- 伺服导轨输入(4.8V至5.4V)手动超控时最高可达10V,但如果电源模块输入不存在且电压高于5.7V,自动驾驶部分将断电
- USB电源输入(4.8V至5.4V)
绝对最大额定值
在这些条件下,系统将不消耗任何功率(无法运行),但仍保持完好。
- 电源模块输入(4.1V至5.7V,0V至20V不会损坏)
- 伺服导轨输入(4.1V至5.7V,0V至20V)
- USB电源输入(4.1V至5.7V,0V至6V)
原理图
FMUv2 + IOv2原理图 -- 原理图与布局
INFO
作为遵循CC - BY - SA 3.0许可的开源硬件设计,所有原理图和设计文件均可在此处获取。
接口
Pixhawk端口如下图所示。这些端口使用Hirose DF13连接器(早于Pixhawk连接器标准中定义的JST - GH连接器)。
WARNING
许多3DR Pixhawk克隆版使用Molex picoblade连接器而非DF13连接器。 它们的引脚是矩形而非方形,不能认为是兼容的。
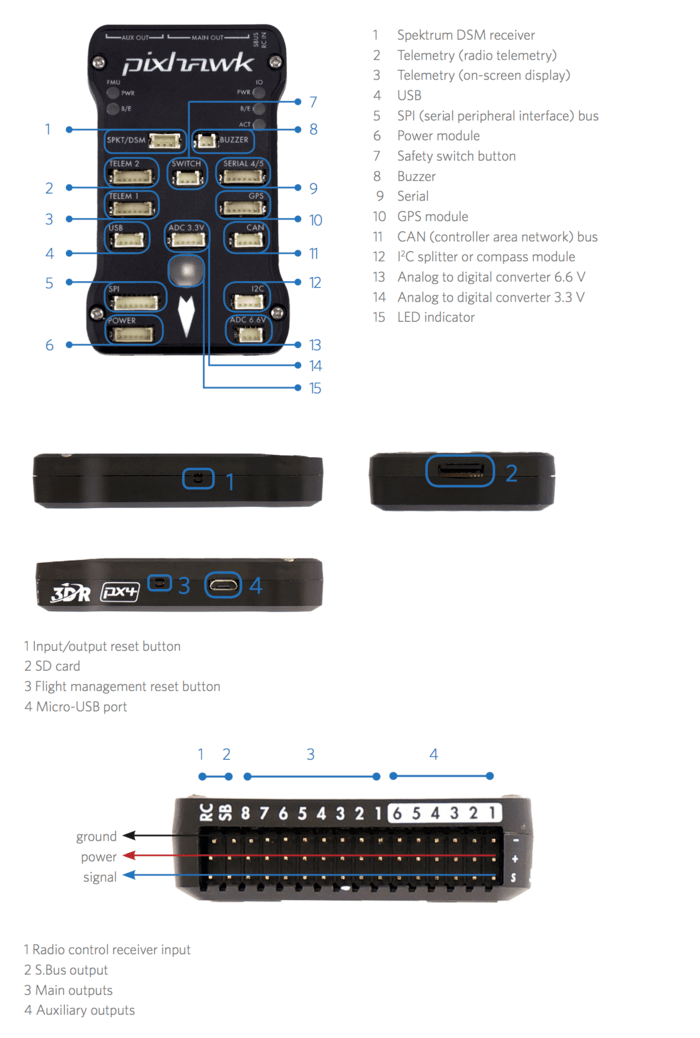
TIP
“RC IN”端口仅用于遥控接收器,并为其提供足够的电力。 切勿将任何舵机、电源或电池连接到该端口或连接到它的接收器。
针脚定义
TELEM1、TELEM2接口
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | TX (输出) | +3.3V |
| 3 | RX (输入) | +3.3V |
| 4(黑) | CTS (输入) | +3.3V |
| 6 | RTS (输出) | +3.3V |
| 6 | GND | GND |
GPS接口
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | TX (输出) | +3.3V |
| 3 | RX (输入) | +3.3V |
| 4(黑) | CAN2 TX | +3.3V |
| 6 | CAN2 RX | +3.3V |
| 6 | GND | GND |
串行4/5端口
由于空间限制,两个端口位于一个连接器上。
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | TX (#4) | +3.3V |
| 3 | RX (#4) | +3.3V |
| 4(黑) | TX (#5) | +3.3V |
| 6 | RX (#5) | +3.3V |
| 6 | GND | GND |
ADC 6.6V
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | ADC输入 | 最高 +6.6V |
| 3 | GND | GND |
ADC 3.3V
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | ADC输入 | 最高 +3.3V |
| 3 | GND | GND |
| 4(黑) | ADC输入 | 最高 +3.3V |
| 6 | GND | GND |
I2C
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | SCL | +3.3(上拉电阻) |
| 3 | SDA | +3.3(上拉电阻) |
| 4(黑) | GND | GND |
CAN
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | CAN_H | +12V |
| 3 | CAN_L | +12V |
| 4(黑) | GND | GND |
SPI
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | SPI_EXT_SCK | +3.3 |
| 3 | SPI_EXT_MISO | +3.3 |
| 4(黑) | SPI_EXT_MOSI | +3.3 |
| 6 | !SPI_EXT_NSS | +3.3 |
| 6 | !GPIO_EXT | +3.3 |
| 7 | GND | GND |
电源(POWER)
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +5V |
| 2 | VCC | +5V |
| 3 | 电流 | +3.3V |
| 4(黑) | 电压 | +3.3V |
| 6 | GND | GND |
| 6 | GND | GND |
开关(SWITCH)
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | VCC | +3.3V |
| 2 | !IO_LED_SAFETY | GND |
| 3 | 安全(SAFETY) | GND |
串口映射
| 通用异步收发传输器(UART) | 设备 | 端口 |
|---|---|---|
| UART1 | /dev/ttyS0 | IO调试 |
| USART2 | /dev/ttyS1 | 遥测1(带流控制) |
| USART3 | /dev/ttyS2 | 遥测2(带流控制) |
| UART4 | ||
| UART7 | 控制台(CONSOLE) | |
| UART8 | 串行口4(SERIAL4) |
调试端口
控制台端口
TIP
连接到控制台的便捷方法是使用Dronecode探针,因为它配备的连接器可用于多种不同的Pixhawk设备。 只需将Dronecode探针上的6针DF13 1:1电缆连接到Pixhawk的“串行4/5”端口。

引脚定义为标准串行引脚,设计用于连接3.3V FTDI电缆(耐压5V)。
| 3DR Pixhawk 1 | FTDI | ||
|---|---|---|---|
| 1 | + 5V (红色) | 不连接(N/C) | |
| 2 | S4发送(Tx) | 不连接(N/C) | |
| 3 | S4接收(Rx) | 不连接(N/C) | |
| 4 | S5发送(Tx) | 5 | FTDI接收(RX,黄色) |
| 5 | S5接收(Rx) | 4 | FTDI发送(TX,橙色) |
| 6 | 地(GND) | 1 | FTDI地(GND,黑色) |
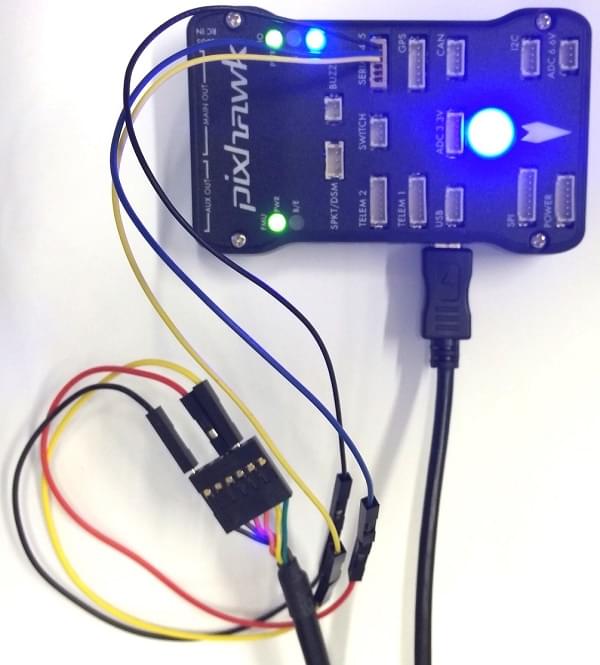
下图展示了FTDI电缆到6针DF13 1:1连接器的接线。

完整的接线如下所示。
INFO
有关如何使用控制台的信息,请参阅:系统控制台。
串行线调试(SWD)端口
SWD(JTAG)端口隐藏在盖子下面(进行硬件调试时必须移除盖子)。 FMU和IO有单独的端口,如下突出显示。
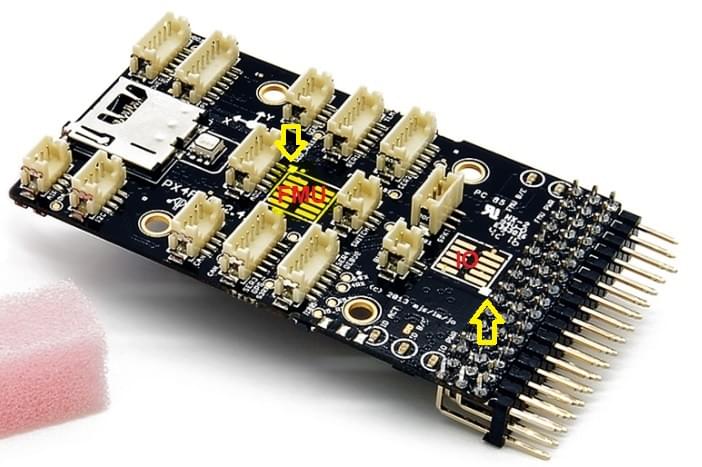
这些端口是ARM 10针JTAG连接器,你可能需要进行焊接。端口的引脚定义如下所示(上方角落的方形标记表示引脚1)。
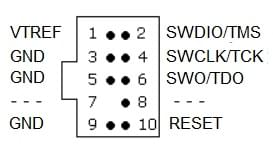
INFO
所有Pixhawk FMUv2板都有类似的SWD端口。
编译固件
TIP
大多数用户无需编译此固件! 当连接适当硬件时,QGroundControl会自动安装预编译版本。
要为该目标编译PX4,执行以下命令:
make px4_fmu-v2_default部件/外壳
- ARM MINI JTAG (J6):1.27毫米10针排针(带护罩),用于Black Magic Probe:FCI 20021521 - 00010D4LF(Distrelec