飞行控制器/传感器方向
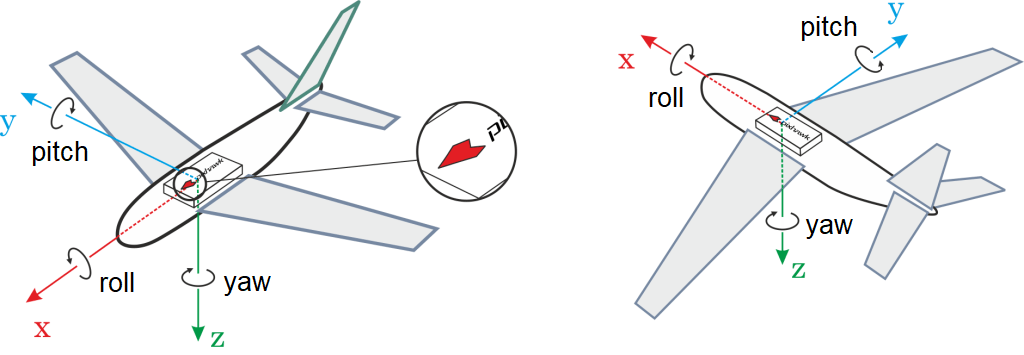
默认情况下,飞行器(若配备外部罗盘)的飞行控制器应朝上安装在机架上部,且箭头指向飞行器前方。若板载或外部罗盘安装在其他方向,则需在固件中进行配置。
方向计算
飞行控制器的横滚(ROLL)、俯仰(PITCH)和/或偏航(YAW)偏移量,是相对于飞行器绕前向(x轴)、右向(y轴)、下向(z轴)的坐标轴来计算的。
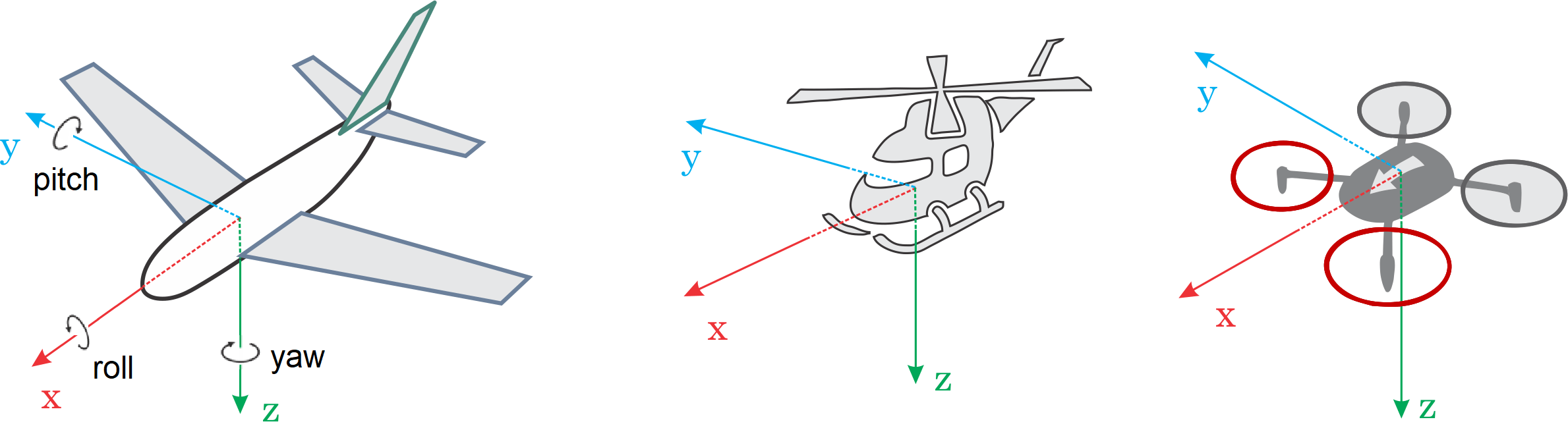
从一个旋转步骤到下一个旋转步骤,围绕其旋转的坐标轴保持不变。也就是说,执行旋转的坐标系保持固定,这也被称为“外旋”。
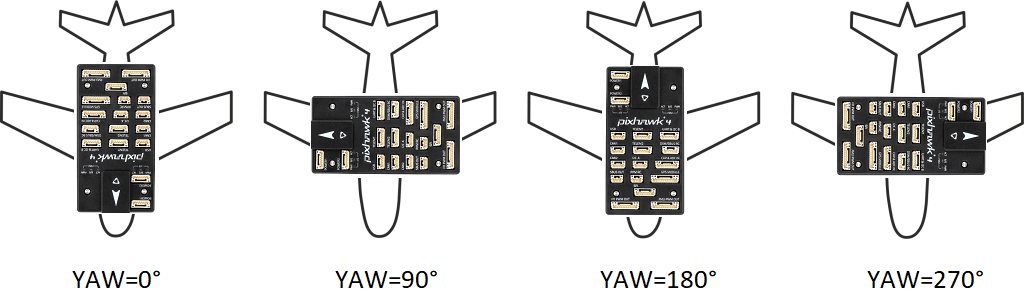
例如,以下展示的飞行器绕z轴旋转(即仅偏航),对应的旋转角度分别为:ROTATION_NONE(无旋转)、ROTATION_YAW_90(偏航90度)、ROTATION_YAW_180(偏航180度)、ROTATION_YAW_270(偏航270度)。
INFO
对于垂直起降尾坐式飞行器(VTOL Tailsitter),在进行所有传感器校准时,应根据其多旋翼配置(即在起飞、悬停、着陆期间相对于飞行器的状态)来设置飞行器方向。
这些坐标轴通常是相对于飞行器稳定向前飞行时的方向而言。更多信息,请参考基本概念。
方向设置
要设置方向,请按以下步骤操作:
- 启动_QGroundControl_并连接飞行器。
- 选择“Q图标 > 飞行器设置 > 传感器”(侧边栏),打开“传感器设置”。
- 选择“方向”按钮。
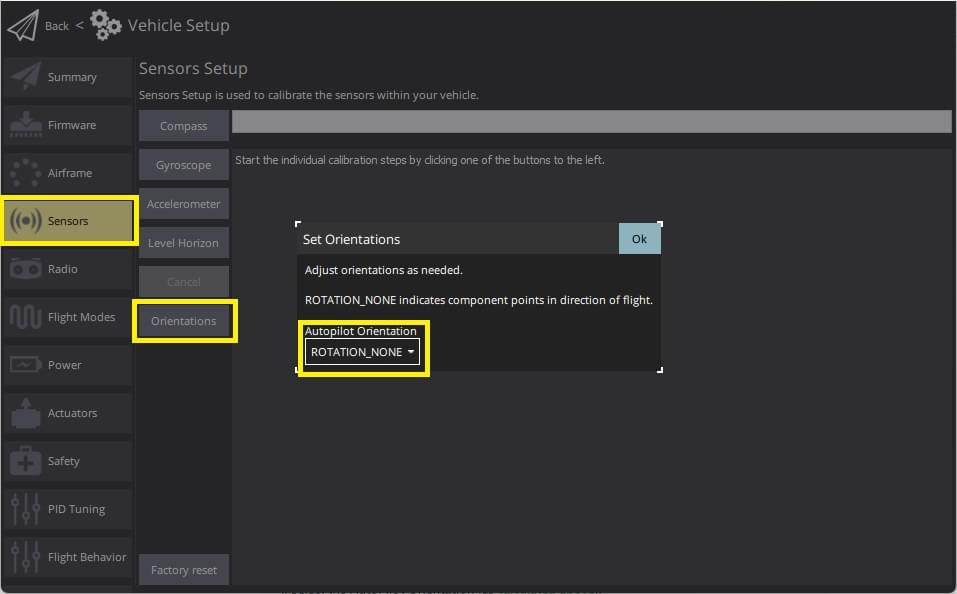
- 选择“自动驾驶仪方向”(如上述方向计算所得)。
- 按下“确定”。
INFO
你可以使用水平地平线校准来补偿控制器方向上的微小偏差,并在飞行视图中使地平线保持水平。
优化调整
在罗盘校准过程中,对于任何标准MAVLink方向(直立且朝前,或在任何轴上有45°倍数的偏移),PX4会自动检测罗盘方向(默认情况下)。
INFO
你可以通过查看CAL_MAGn_ROT参数,确认自动检测是否成功。
如果使用了非标准方向,则需要为每个罗盘设置CAL_MAGx_ROLL、CAL_MAGx_PITCH和CAL_MAGx_YAW参数为实际使用的角度。
这将自动将CAL_MAGn_ROT设置为“自定义欧拉角”,并阻止对所选罗盘进行自动校准(即使设置了SENS_MAG_AUTOROT)。
更多信息
- 高级方向调整(仅面向高级用户)。
- QGroundControl用户指南 > 传感器