指南针校准
指南针校准流程用于配置所有已连接的内置和外置磁力计 。QGroundControl会引导你将飞行器摆放至多个预设方位,并围绕指定轴旋转飞行器。
概述
首次使用指南针时需进行校准。若飞行器曾暴露于强磁场环境,或在磁特性异常区域使用过,可能也需要重新校准。
TIP
指南针校准不佳的表现有:多旋翼飞行器悬停时原地打转、“马桶式盘旋”(盘旋半径逐渐增大,呈螺旋状向外飞行,通常高度不变,最终导致飞行器失控飞远),或在尝试直线飞行时偏离航线。QGroundControl也会提示“mag sensors inconsistent(磁传感器不一致)”的错误信息。
指南针校准分为两种类型:
- 完全校准:首次在飞行器机架上安装自动驾驶仪后,或飞行器配置发生重大变动时,需进行此项校准。它通过估算每个轴的偏移量和比例因子,来补偿硬铁和软铁效应。
- 部分校准(“快速校准”):在飞行器准备飞行前、更换有效载荷后,或仅当指南针指向似乎不准确时,可按常规进行此项校准。此类校准仅估算偏移量,以补偿硬铁效应。
执行校准
操作前提
校准前需注意:
- 选择远离大型金属物体或磁场的位置。
TIP
金属并非总是显而易见!避免在办公桌(通常含有金属条)上或车辆旁进行校准。若你站立的混凝土板内钢筋分布不均,校准甚至也会受到影响。
::: 2. 尽可能通过遥测电台而非USB连接。USB可能会造成显著的磁干扰。 3. 若使用外置指南针(或GPS/指南针组合模块),务必确保其安装位置尽量远离其他电子设备,以减少磁干扰,且安装方向需为 受支持的方向。
完全校准
校准步骤如下:
- 启动QGroundControl并连接飞行器。
- 选择“Q图标 > 飞行器设置 > 传感器”(侧边栏),打开“传感器设置”。
- 点击“指南针”传感器按钮。
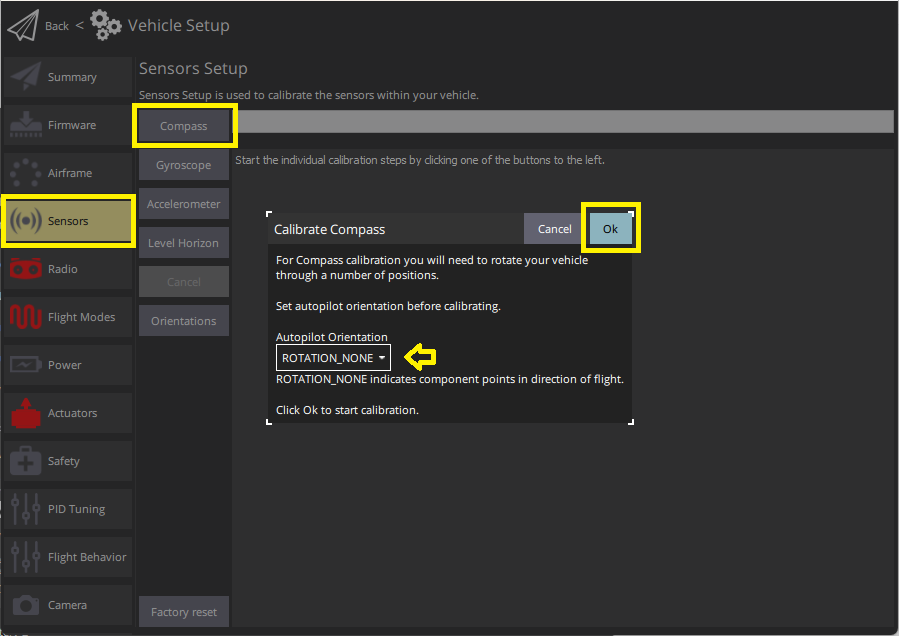
INFO
你应已设置自动驾驶仪方向 。若尚未设置,也可在此处进行设置。
- 点击“确定”开始校准。
- 将飞行器摆放至下图所示的某一方位并保持静止。随后,当提示出现(方向图像变为黄色)时,围绕指定方向旋转飞行器。该位置标定完成后,屏幕上相应图示将变为绿色。

- 在飞行器的所有方位上重复校准步骤。
当你完成所有方位的校准后,QGroundControl会显示“校准完成”(所有方位图像将显示为绿色,进度条也将完全填满)。之后,你便可继续校准下一个传感器。
部分“快速”校准
这种校准类似于常见的智能手机8字指南针校准法:
- 将飞行器置于身前,在各轴上随机进行部分旋转。通常每个方向做2 - 3次约30度的摆动即可。
- 等待航向估算稳定下来,并确认指南针指向正确方向(这可能需要几秒钟)。
备注:
- 此类校准没有开始/停止操作(飞行器未解锁时,算法持续运行)。
- 校准结果会立即应用于数据(无需重启),但仅在飞行器解锁后才会保存到校准参数中(若在校准与关机之间未进行解锁/上锁操作,校准结果将会丢失)。
- 步骤1中部分旋转的幅度和速度会影响校准质量。通常遵循上述建议即可。
验证
校准完成后,转动飞行器,例如转向基本方位,检查航向指示器和地图上箭头的方向是否稳定,且与飞行器方向一致。
额外校准/配置
上述流程会自动检测、设置默认旋转角度、校准并确定所有已连接磁力计的优先级。
一般而言,无需进一步进行指南针配置。
INFO
默认情况下,所有外置指南针具有相同优先级,且高于所有内置指南针的优先级。
禁用指南针
如前所述,一般无需进一步配置。
不过,开发人员若有需要,可使用指南针参数禁用内置指南针。这些参数以CAL_MAGx_为前缀(其中x = 0 - 3)。
若要禁用内置指南针:
- 使用CAL_MAGn_ROT确定哪些是内置指南针。若
CAL_MAGn_ROT == 1,则该指南针为内置指南针。 - 然后使用CAL_MAGx_PRIO禁用该指南针。此参数也可用于更改指南针的相对优先级。
调试
通过设置SDLOG_MODE = 1和SDLOG_PROFILE = 64,可以记录磁力计(实际上所有传感器皆如此)的原始比较数据。更多信息,请参阅日志记录。
更多信息
- 外设 > GPS与指南针
- 基础组装(各飞行控制器的设置指南)
- 指南针电源补偿(高级配置)
- QGroundControl用户指南 > 传感器
- PX4设置视频 - 2分38秒处(YouTube)