(以下内容根据文档中的条件判断语句,分别针对多旋翼飞行器和固定翼飞机给出翻译。由于原文档结构中部分内容在不同飞行器类型下有不同表述,翻译也将按此结构分别呈现。)
多旋翼飞行器
自动调参(多旋翼飞行器)
自动调参实现了PX4速率和姿态控制器调参过程的自动化,这些控制器对于稳定且响应灵敏的飞行至关重要(其他调参则相对“可选”)。
调参只需进行一次,除非你使用的飞行器已由制造商完成调参(且之后未进行任何修改),否则建议进行自动调参。
WARNING
自动调参在飞行过程中进行。飞行器机身必须具备良好的飞行性能,能够应对适度干扰,并且需要密切关注:
- 测试你的飞行器是否足够稳定以进行自动调参。
- 准备好中止自动调参过程。你可以通过切换飞行模式来实现这一点。
- 验证调参后飞行器飞行状态良好。
调参前测试
在运行自动调参之前,飞行器必须能够飞行并充分实现自身稳定。此测试旨在确保飞行器能够在位置控制模式下安全飞行。
为确保飞行器足够稳定以进行自动调参,请按以下步骤操作:
- 执行常规的飞行前安全检查清单,确保飞行区域开阔且空间充足。
- 起飞,并在高度模式或稳定模式下,在离地面1米的高度悬停。
- 使用遥控器的横滚摇杆执行以下动作,将飞行器倾斜仅几度:“左横滚 > 右横滚 > 回中”(整个动作应耗时约3秒)。飞行器应在2次振荡内实现自我稳定。
- 重复该动作,每次尝试时增大倾斜幅度。如果飞行器在倾斜约20度时仍能在2次振荡内实现自我稳定,则进入下一步。
- 在俯仰轴上重复相同的动作。与上述步骤一样,从较小角度开始,在增大倾斜角度之前,确认飞行器能够在2次振荡内实现自我稳定。
如果无人机能够在2次振荡内实现自我稳定,那么它就可以进行自动调参流程。
WARNING
如果无人机无法充分实现自我稳定,请遵循故障处理部分的说明。这些说明介绍了为使飞行器准备好进行自动调参所需的最低限度手动调参。
自动调参流程
自动调参序列必须在安全的飞行区域内进行,且该区域要有足够空间。整个过程大约需要40秒(19到68秒之间)。为获得最佳效果,建议在天气平静的条件下进行测试。
自动调参的推荐模式是高度模式,但也可以使用其他任何飞行模式。在自动调参期间不能使用遥控器摇杆(移动摇杆将停止自动调参操作)。
测试步骤如下:
- 执行调参前测试。
- 使用遥控器控制,在高度模式下起飞。将飞行器悬停在安全距离且离地面数米的高度(4到20米之间)。
- 启用自动调参。
- 在QGroundControl中,打开菜单“飞行器设置 > PID调参”:
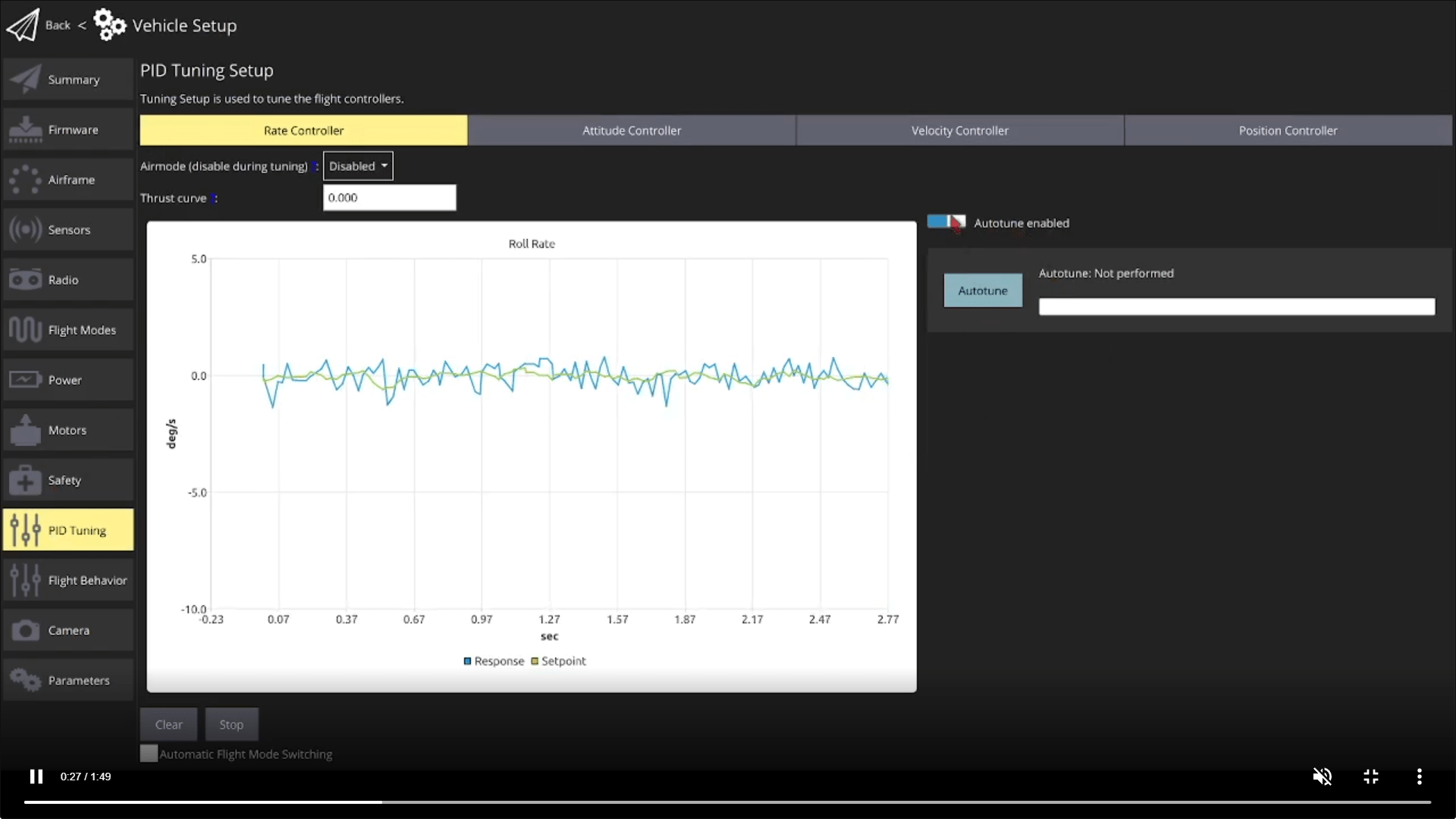
- 选择“速率控制器”或“姿态控制器”选项卡。
- 确保“自动调参已启用”按钮已启用(这将显示“自动调参”按钮,并移除手动调参选择器)。
- 阅读警告弹出框内容,然后点击“确定”开始调参。
- 在QGroundControl中,打开菜单“飞行器设置 > PID调参”:
- 无人机将首先开始快速进行横滚运动,随后是俯仰和偏航运动。进度会显示在“自动调参”按钮旁边的进度条中。
- 手动降落并解除武装,以应用新的调参参数。小心起飞并手动测试飞行器是否稳定。
WARNING
如果出现任何强烈振荡,请立即降落,并遵循以下故障处理部分的说明。
其他注意事项:
故障处理
进行调参前测试时无人机出现振荡
- 缓慢振荡(每秒1次振荡或更慢):这种情况通常发生在大型平台上,意味着姿态回路相对于速率回路过快:
- 每次以1.0的步长降低MC_ROLL_P和MC_PITCH_P。
- 快速振荡(每秒超过1次振荡):这是因为速率回路的增益过高。
- 每次以0.02的步长降低
MC_[ROLL|PITCH|YAW]RATE_K。
- 每次以0.02的步长降低
自动调参序列失败
如果在自动调参期间无人机移动不够,系统识别算法可能难以找到正确的系数。
每次以1的步长增加MC_AT_SYSID_AMP参数,然后再次触发自动调参。
自动调参后无人机出现振荡
由于数学模型中未包含的因素,如延迟、饱和、转换速率、机身灵活性等,回路增益可能过高。要解决此问题,请遵循进行调参前测试时无人机出现振荡中描述的相同步骤。
我仍然无法使其正常工作
尝试使用下面另请参阅中列出的指南进行手动调参。
可选配置
在空中/着陆时应用调参
默认情况下,多旋翼飞行器在应用参数前先降落。此行为可使用MC_AT_APPLY参数进行配置:
0:不应用增益。这用于测试目的,如果用户希望在不直接使用自动调参算法结果的情况下检查其结果,可使用此设置。1:解除武装后应用增益(多旋翼飞行器的默认设置)。然后操作员可以在小心起飞时测试新的调参。2:立即应用(固定翼飞机的默认设置)。应用新的调参,向控制器发送干扰,并在接下来的4秒内监测稳定性。如果控制回路不稳定,控制增益将立即恢复到先前的值。如果测试通过,飞行员则可以使用新的调参。
另请参阅
- 多旋翼飞行器PID调参指南(手动/简易)
- 多旋翼飞行器PID调参指南(高级/详细)
- 参数 > 自动调参(前缀为
MC_AT_)。
固定翼飞机
自动调参(固定翼飞机)
自动调参实现了PX4速率和姿态控制器调参过程的自动化,这些控制器对于稳定且响应灵敏的飞行至关重要(其他调参则相对“可选”)。
调参只需进行一次,除非你使用的飞行器已由制造商完成调参(且之后未进行任何修改),否则建议进行自动调参。
WARNING
自动调参在飞行过程中进行。飞行器机身必须具备良好的飞行性能,能够应对适度干扰,并且需要密切关注:
- 测试你的飞行器是否足够稳定以进行自动调参。
- 准备好中止自动调参过程。你可以通过切换飞行模式或使用自动调参启用/禁用开关(如果已配置)来实现这一点。
- 验证调参后飞行器飞行状态良好。
调参前测试
在运行自动调参之前,飞行器必须能够飞行并充分实现自身稳定。此测试旨在确保飞行器能够在位置控制模式下安全飞行。
为确保飞行器足够稳定以进行自动调参,请按以下步骤操作:
- 执行常规的飞行前安全检查清单,确保飞行区域开阔且空间充足。
- 起飞,并在位置模式或高度模式下以巡航速度飞行。
- 使用遥控器的横滚摇杆执行以下动作,将飞行器倾斜仅几度:“左横滚 > 右横滚 > 回中”(整个动作应耗时约3秒)。飞行器应在2次振荡内实现自我稳定。
- 重复该动作,每次尝试时增大倾斜幅度。如果飞行器在倾斜约20度时仍能在2次振荡内实现自我稳定,则进入下一步。
- 在俯仰轴上重复相同的动作。与上述步骤一样,从较小角度开始,在增大倾斜角度之前,确认飞行器能够在2次振荡内实现自我稳定。
如果无人机能够在2次振荡内实现自我稳定,那么它就可以进行自动调参流程。
WARNING
如果无人机无法充分实现自我稳定,请遵循故障处理部分的说明。这些说明介绍了为使飞行器准备好进行自动调参所需的最低限度手动调参。
自动调参流程
自动调参序列必须在安全的飞行区域内进行,且该区域要有足够空间。整个过程大约需要40秒(19到70秒之间)。为获得最佳效果,建议在天气平静的条件下进行测试。
自动调参的推荐模式是保持模式,但也可以使用其他任何飞行模式。在自动调参期间不能使用遥控器摇杆(移动摇杆将停止自动调参操作)。
测试步骤如下:
- 执行调参前测试。
- 使用遥控器控制起飞,一旦达到巡航速度,激活保持模式。这将引导飞机以恒定高度和速度做圆周飞行。
- 启用自动调参。
- 提示:如果已配置启用/禁用自动调参开关,你只需将开关切换到“启用”位置。
- 在QGroundControl中,打开菜单“飞行器设置 > PID调参”:
- 选择“速率控制器”或“姿态控制器”选项卡。
- 确保“自动调参已启用”按钮已启用(这将显示“自动调参”按钮,并移除手动调参选择器)。
- 阅读警告弹出框内容,然后点击“确定”开始调参。
- 无人机将首先开始快速进行横滚运动,随后是俯仰和偏航运动。进度会显示在“自动调参”按钮旁边的进度条中。
- 调参将立即/自动在飞行中应用并进行测试(默认情况下)。然后PX4将运行4秒测试,如果检测到问题,将恢复原来的调参。
WARNING
如果出现任何强烈振荡,请立即降落,并遵循以下故障处理部分的说明。
其他注意事项:
故障处理
进行调参前测试时无人机出现振荡
- 缓慢振荡(每秒1次振荡或更慢):这种情况通常发生在大型平台上,意味着姿态回路相对于速率回路过快:
- 快速振荡(每秒超过1次振荡):这是因为速率回路的增益过高。
自动调参序列失败
如果在自动调参期间无人机移动不够,系统识别算法可能难以找到正确的系数。
每次以1的步长增加FW_AT_SYSID_AMP参数,然后再次触发自动调参。
自动调参后无人机出现振荡
由于数学模型中未包含的因素,如延迟、饱和、转换速率、机身灵活性等,回路增益可能过高。要解决此问题,请遵循进行调参前测试时无人机出现振荡中描述的相同步骤。
我仍然无法使其正常工作
尝试使用下面另请参阅中列出的指南进行手动调参。
可选配置
在空中/着陆时应用调参
默认情况下,固定翼飞机调参在飞行中应用参数,然后PX4运行测试以确认控制器是否正常工作。此行为可使用FW_AT_APPLY参数进行配置:
0:不应用增益。这用于测试目的,如果用户希望在不直接使用自动调参算法结果的情况下检查其结果,可使用此设置。1:解除武装后应用增益(多旋翼飞行器的默认设置)。然后操作员可以在小心起飞时测试新的调参。2:立即应用(固定翼飞机的默认设置)。应用新的调参,向控制器发送干扰,并在接下来的4秒内监测稳定性。如果控制回路不稳定,控制增益将立即恢复到先前的值。如果测试通过,飞行员则可以使用新的调参。
启用/禁用自动调参开关
可以通过RC AUX通道配置一个遥控器开关来启用/禁用自动调参(在任何模式下)(注意,此功能仅在固定翼飞行器上支持)。
要映射开关:
- 在遥控器上选择一个RC通道用于自动调参启用/禁用开关。
- 设置RC_MAP_AUX1以匹配你所选开关的RC通道(你可以使用
RC_MAP_AUX1到RC_MAP_AUX6中的任何一个)。 - 设置FW_AT_MAN_AUX为所选通道(例如,如果你映射了
RC_MAP_AUX1,则设置为1: Aux 1)。
当开关低于0.5(在手动控制设定点范围[-1, 1]内)时,自动调谐器将被禁用;当开关通道高于0.5时,自动调谐器将被启用。
如果使用RC AUX开关启用自动调参,请确保在飞行前选择调参轴。
选择调参轴
固定翼飞行器(仅)可以使用FW_AT_AXES位掩码参数选择要调参的轴:
- 位
0:横滚(默认) - 位
1:俯仰(默认) - 位
2:偏航
开发者/SDK
自动调参使用MAV_CMD_DO_AUTOTUNE_ENABLE MAVLink命令启动。
在撰写本文时,该消息会定期重新发送,以轮询PX4的进度:COMMAND_ACK包含操作正在进行的结果,以及进度百分比。当进度达到100%或飞行器降落并解除武装时,操作完成。
INFO
这不是命令协议长运行命令的MAVLink兼容实现。PX4应按协议要求流式传输进度,而不允许轮询。
此功能尚未得到MAVSDK的支持。
背景/详细信息
PX4使用PID控制器(速率、姿态、速度和位置)来计算使飞行器从当前估计状态移动到匹配期望设定点所需的输出。为了使飞行器发挥最佳性能,必须对这些控制器进行良好的调参。特别是,调参不佳的速率控制器会导致在所有模式下飞行稳定性降低,并且从干扰中恢复所需的时间更长。
一般来说,如果你使用的机架配置与你的飞行器相似,那么飞行器将能够飞行。然而,除非该配置与你的硬件精确匹配,否则你应该对速率和姿态控制器进行调参。对速度和位置控制器进行调参的重要性相对较低,因为它们受飞行器动力学的影响较小,并且类似机身的