当 $frontmatter.frame 等于 “Multicopter” 时:
组装多旋翼飞行器
本主题提供基本说明及链接,展示如何连接并组装运行PX4的典型多旋翼飞行器(UAV)的核心组件。这些组件包括飞行控制器、GPS、外置罗盘、手动控制器或数传系统、电机或其他控制执行器、有效载荷及电力系统。
当 $frontmatter.frame 等于 “Plane” 时:
组装固定翼飞行器
本主题提供基本说明及链接,展示如何连接并组装运行PX4的典型固定翼飞行器(UAV)的核心组件。这些组件包括飞行控制器、GPS、外置罗盘、空速计、手动控制器或数传系统、电机或其他控制执行器、有效载荷及电力系统。
当 $frontmatter.frame 等于 “VTOL” 时:
组装垂直起降飞行器
本主题提供基本说明及链接,展示如何连接并组装运行PX4的典型垂直起降飞行器(UAV)的核心组件。这些组件包括飞行控制器、GPS、外置罗盘、空速计、手动控制器或数传系统、电机或其他控制执行器、有效载荷及电力系统。
当 $frontmatter.frame 为其他值时:
组装无人系统
(这是针对通用飞行器的介绍)
本主题提供基本说明及链接,展示如何连接并组装运行PX4的典型无人系统(UAS)的核心组件。
核心组件包括飞行控制器、GPS、外部罗盘、手动控制器和/或遥测无线电系统、电机和/或其他控制执行器、有效载荷及电力系统。前向飞行器(如垂直起降或固定翼飞行器)通常还配备空速传感器。
这些说明主要针对使用Pixhawk系列飞行控制器(FC)的情况,特别是采用Pixhawk连接器标准的控制器。对于这些FC,大部分“接线”操作较为简单,只需使用配套电缆将组件连接到标记适当的端口即可。
如果您的FC未采用连接器标准...
不遵循连接器标准的Pixhawk系列飞行控制器通常会提供用于与Pixhawk标准组件互连的电缆。对于其他控制器,您可能需要手动制作电缆和连接器。
特定飞行控制器指南包含特定FC的接线和配置信息,制造商网站上的指南也有相关内容。
飞行控制器概述
下图展示了CUAV和Holybro的Pixhawk v6x飞行控制器。它们的可用端口非常相似,因为它们均为Pixhawk标准自动驾驶仪,且采用了Pixhawk连接器标准。


以下列出了连接器的标准端口,以及每个FC上的标签及其用途。FC具有许多相同的端口和相似的名称,核心外围设备的连接方式也相同。
| Pixhawk连接器标准 | Holybro | CUAV | 连接对象... |
|---|---|---|---|
| 全功能GPS及安全开关 | GPS1 | GPS&SAFETY | 主GNSS模块(GPS、罗盘、安全开关、蜂鸣器、LED) |
| 基本GPS | GPS2 | GPS2 | 辅助GNSS模块(GNSS/罗盘) |
| CAN | CAN1/CAN2 | CAN1/CAN2 | DroneCAN设备,如GNSS模块、电机等 |
| 遥测 | TELEM (1,2,3) | TELEM (1,2,3) | 遥测电台、伴侣计算机、MAVLink相机等 |
| 模拟电源 | POWER (1,2) | POWER (1,2) | SMbus(I2C)电源模块 |
| I2C | I2C | 无 | 其他I2C外围设备 |
| SPI | SPI | SPI6 | SPI设备(注意:11针,非标准的6针) |
| PX4全功能调试 | FMU DEBUG | FMU DEBUG, IO DEBUG | Pixhawk “x” FC的调试 |
| Pixhawk迷你调试 | 无 | 无 | 其他Pixhawk变体的调试 |
此外,还有一些其他相似之处,但不属于标准范畴:它们都有相同的以太网端口(“ETH”)、“SBUS OUT”、“AD&IO”、“USB”和“USB-C”。
同时,也存在一些重要区别,尤其是各种RC控制协议和PWM输出的连接方式。我们将在相关部分讨论这些内容。
TIP
连接外围设备前,请先切断飞行控制器的电源!这是“最佳实践”,尽管并非在所有情况下都绝对必要。
飞控的安装与方向
飞行控制器理想的安装方式是安装在机架上,尽可能靠近飞行器重心,顶部朝上,箭头指向飞行器前方。
为减少振动对飞行控制器内部IMU和陀螺仪的影响,应使用安装泡沫(若有提供)安装控制器,否则请遵循制造商的指导。
INFO
如果因空间限制等原因无法按建议/默认方向安装控制器,您需要根据实际使用方向配置自动驾驶仪软件:飞行控制器方向。
GNSS/罗盘(+蜂鸣器 + 安全开关 + LED)
Pixhawk自动驾驶仪系统通常包括一个主GNSS/罗盘模块,该模块集成了蜂鸣器、安全开关和UI LED,也可能配备一个辅助GPS/罗盘模块。此外,还支持用于厘米级精度的RTK GNSS模块。
GNSS/指南针模块应安装在机架上,尽可能远离其他电子设备——将指南针与其他电子设备分开可减少电磁干扰。只要方向标记垂直并朝向飞行器前方,或在任何轴上以45度的倍数偏移定位,校准期间将自动检测方向。如有需要,您可以其他偏移量定位,但随后需手动设置方向。更多信息,请参阅安装罗盘(或GNSS/罗盘)。
这些模块可连接到串行端口或CAN总线。
串口GNSS模块
主GNSS/指南针模块连接到飞行控制器上标记为GPS1或GPS&SAFETY的端口,通常为10针JST GH连接器。如果有第二个GNSS/指南针模块,则连接到标记为GPS2的端口。
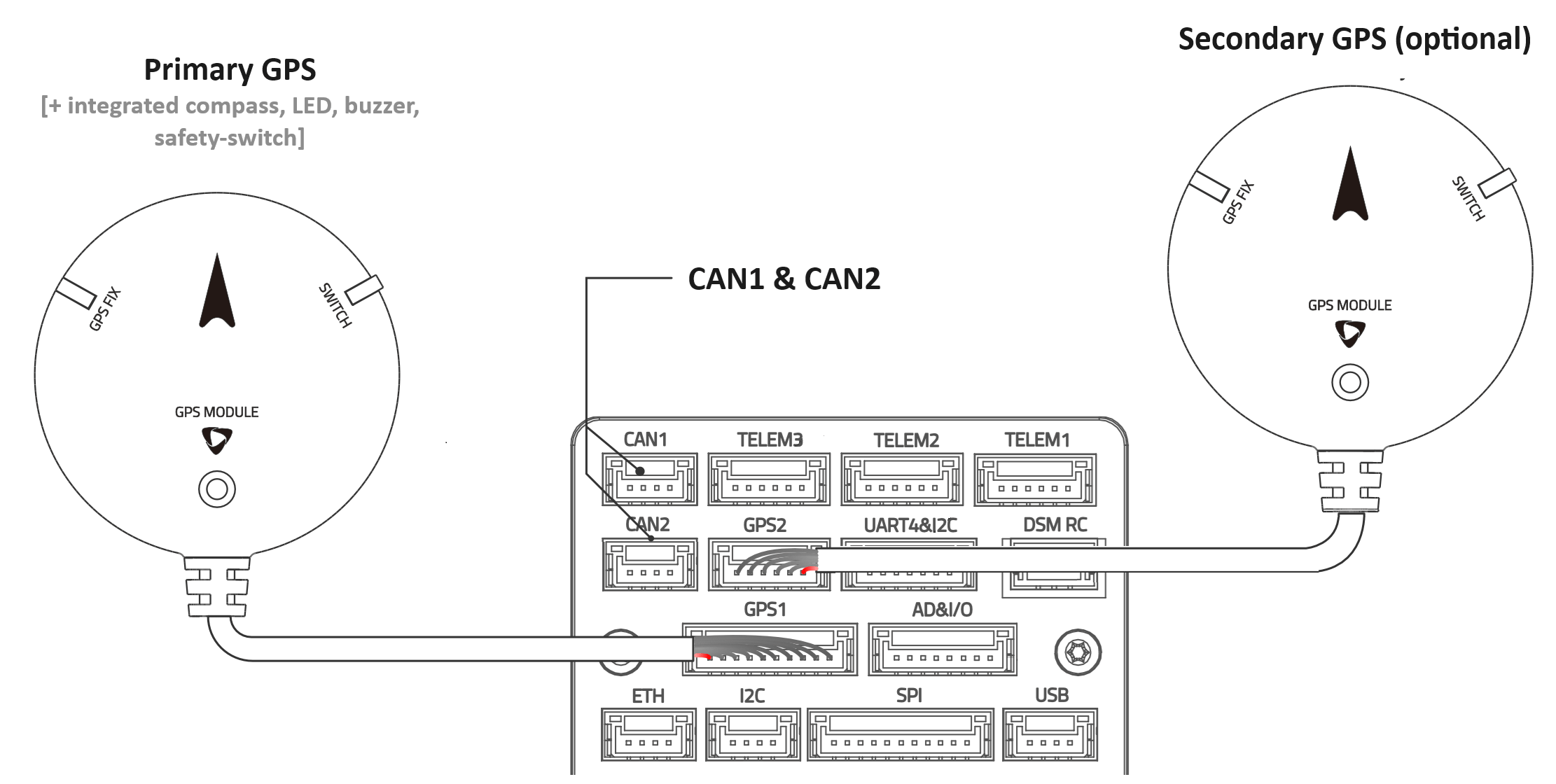
Details
Pixhawk连接器标准的10针_全功能GPS加安全开关端口_用于连接主GNSS。它包括用于GNSS的UART端口、用于指南针的I2C端口,以及用于蜂鸣器、安全开关和UI LED的端口。PX4默认将此UART配置为主GPS。
6针_基本GPS端口_(若存在)仅包含UART和I2C端口。PX4可能不会将其配置为辅助GPS端口。您可按照以下说明自行检查/配置串行端口配置。
6针_基本GPS端口_(若存在)仅包含UART和I2C端口。PX4可能不会将其配置为辅助GPS端口。您可按照说明自行检查/配置。
DroneCAN GNSS模块
DroneCAN GNSS/罗盘模块连接到CAN总线端口,通常标记为CAN1和CAN2(如上图所示)。DroneCAN主题中有连接和配置说明。
RTK GNSS模块
RTK GNSS模块以与“普通”GNSS模块相同的方式连接到FC的专用串行端口或CAN端口。但请注意,地面站需要一个单独的基准模块(详情见RTK GNSS)。
当 $frontmatter.frame 等于 “Plane” 或 “VTOL” 时:
空速传感器
强烈建议固定翼和垂直起降飞行器配备空速传感器。这非常重要,因为自动驾驶仪没有其他方法检测失速。
几乎所有空速传感器都支持通过I2C总线连接,可按如下方式插入Pixhawk标准I2C端口(以Holybro空速传感器和Pixhawk 6C为例)。无需单独为传感器供电。

请注意,如果I2C端口不足以连接所有外围设备,可使用I2C总线分配器将端口扩展为多个端口。
WARNING
部分I2C设备使用5V的SCL/SDA线,而Pixhawk标准I2C端口期望3.3V。您可使用I2C电平转换器将这些设备连接到Pixhawk飞行控制器。
距离传感器
当 $frontmatter.frame 等于 “Multicopter” 或 “VTOL” 时:
距离传感器可显著提升飞行器的稳定性和性能,在某些应用场景中是必需的:
- 配备距离传感器可大幅改善着陆效果:
- 着陆检测更可靠。
- 着陆更平稳,因为传感器可帮助检测在触地前减缓飞行器速度的正确时机。
- 降低因高度估计错误或触地点高度设置不当导致硬着陆的风险。
- 实现地形跟随功能。
- 在无GNSS导航(配合光流传感器)飞行时,实现可靠的状态估计。
当 $frontmatter.frame 等于 “VTOL” 时:
- 可在接近地面时禁用“推进辅助”。
当 $frontmatter.frame 等于 “Plane” 时:
强烈建议配备距离传感器,因为它们可在着陆时实现适当的拉平操作,否则几乎不可能实现平稳的固定翼自动着陆。
与其他一些组件不同,距离传感器没有常用的特定总线或端口。不同的测距仪将通过I2C、CAN、串行端口甚至PWM输入进行连接!
有关如何将特定传感器与PX4集成的说明,请参阅距离传感器及制造商文档。
当 $frontmatter.frame 等于 “Multicopter” 或 “VTOL” 时:
光流传感器
光流技术是一种计算机视觉技术,它使用向下的摄像头和向下的距离传感器来估计地面速度。在无GNSS导航的情况下,如在建筑物内、地下或其他GNSS信号受限的环境中,可用于准确估计速度。
光流传感器可能集成了摄像头和距离传感器,也可能仅包含摄像头(此时需要单独的距离传感器)。光流传感器的连接方式没有标准化,传感器可能通过I2C、CAN、串行端口上的MAVLink等方式连接。
有关如何将特定传感器与PX4集成的说明,请参阅光流传感器及制造商文档。
无线电控制(可选)
遥控(RC)系统可用于手动控制无人机系统。RC系统由两部分组成:连接到飞行控制器的飞行器端无线电接收器,以及集成在手持控制器中的地面端无线电发射器。
TIP
PX4在自主飞行模式下并非必须使用手动控制器。然而,在调试新机架时,RC系统至关重要,对于其他低延迟手动飞行应用场景也强烈推荐使用。
有多种不同的RC标准,如Spektrum/DSM、S.BUS、PPM等。遥控发射器与接收器介绍了如何选择和绑定兼容的发射器/接收器。
RC端口不属于Pixhawk连接器标准的一部分。连接接收器部分介绍了如何识别连接特定接收器的端口。
通常,可从飞行控制器上的标签轻松推断出正确的端口:
- Spektrum/DSM接收器通常连接到标签中包含
DSM的输入端口,如:DSM、DSM/SBUS RC、DSM RC、DSM/SBUS/RSSI。 - PPM或SBUS接收器连接到RC输入端口,最常见的标记为
RC IN,也可能是标签中包含SBUS或PPM的端口。 - Pixhawk飞行控制器通常配备用于连接常见RC接收器类型的电缆。
遥测电台(可选)
遥测电台可用于地面控制站(GCS)与飞行中的飞行器进行通信。通过GCS,您可通过图形界面监控和控制无人机系统、编辑、上传和运行任务、查看连接相机的视频、捕获视频和图像等。
将飞行器端电台连接到TELEM1端口,如下图所示。另一端电台连接到地面站计算机或移动设备(通常通过USB)。
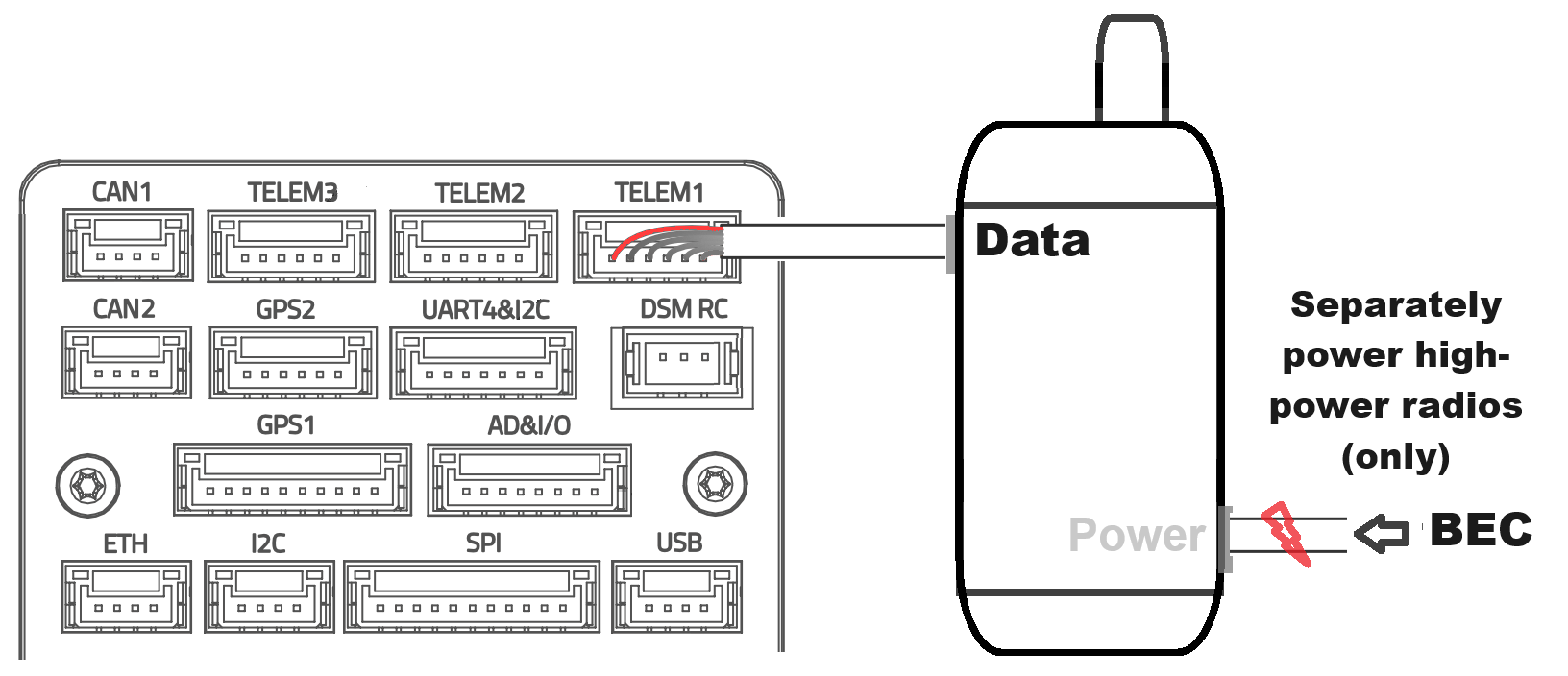
低功耗遥测电台(<1.5 A)由端口供电,通常无需进一步配置。
如果使用更高功率/更远射程的电台或其他端口,则需要通过BEC单独为电台供电,并修改遥测端口的数据速率。您可能还需要配置电台本身,对于IP电台,可能需要通过以太网连接——请查阅电台特定文档获取设置和配置信息。
Details
SD卡
强烈建议使用SD卡。除其他用途外,它对于记录和分析飞行细节以及使用DroneCan/UAVCAN总线硬件是必需的。许多飞行控制器在出厂时已安装SD卡,但您应查看FC的文档确认。
TIP
更多信息,请参阅基本概念 > SD卡(可移动存储器)。
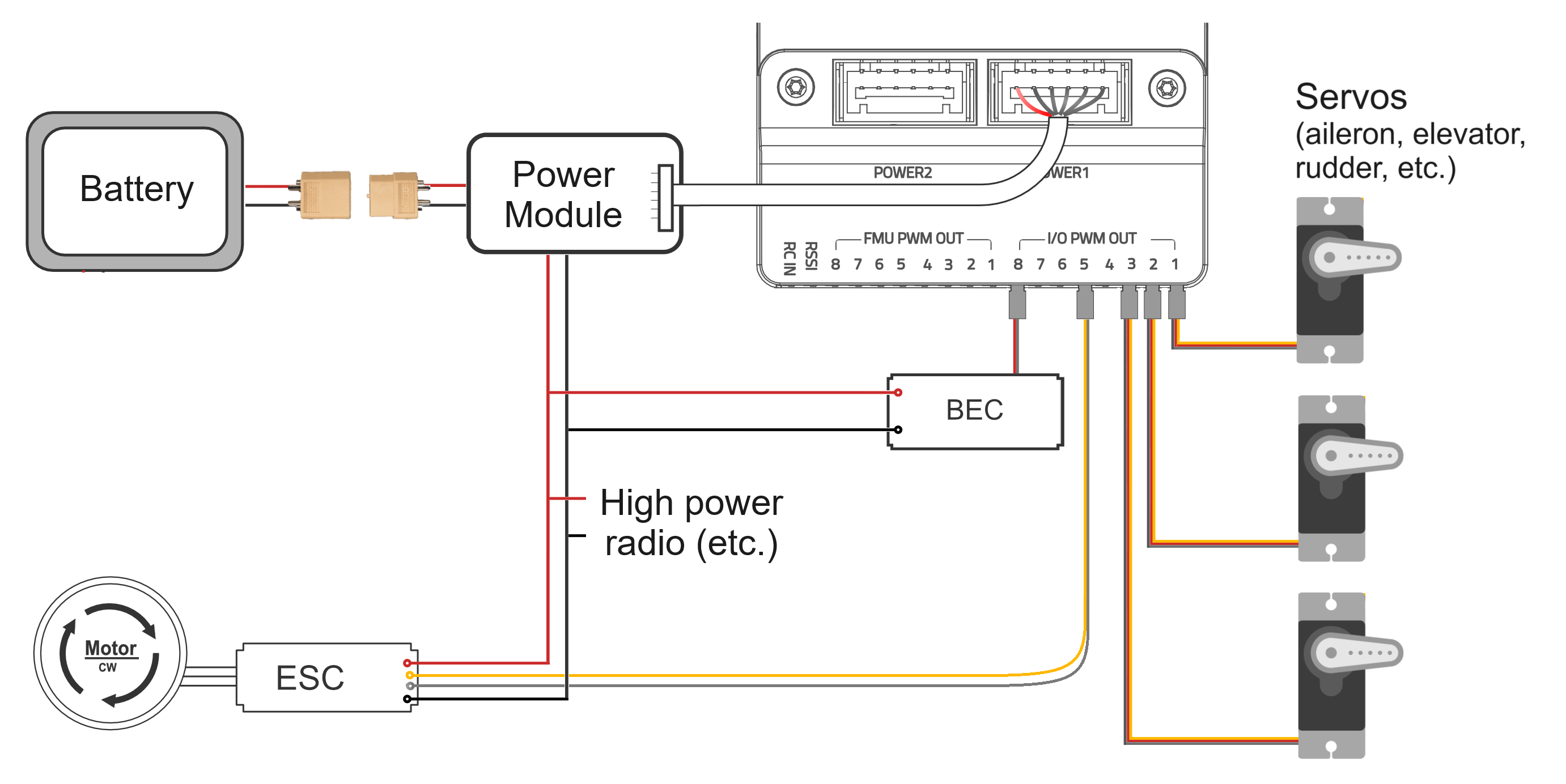
电源与执行器
下图展示了飞行控制器、电机、控制面执行器、其他执行器及其他系统的接线方式,包括电源和PWM控制信号连接。特定飞行器可能有更多或更少的电机和执行器,但使用PWM输出时的接线方式可能类似!
当 $frontmatter.frame 等于 “Plane” 时:
当 $frontmatter.frame 为其他值时:
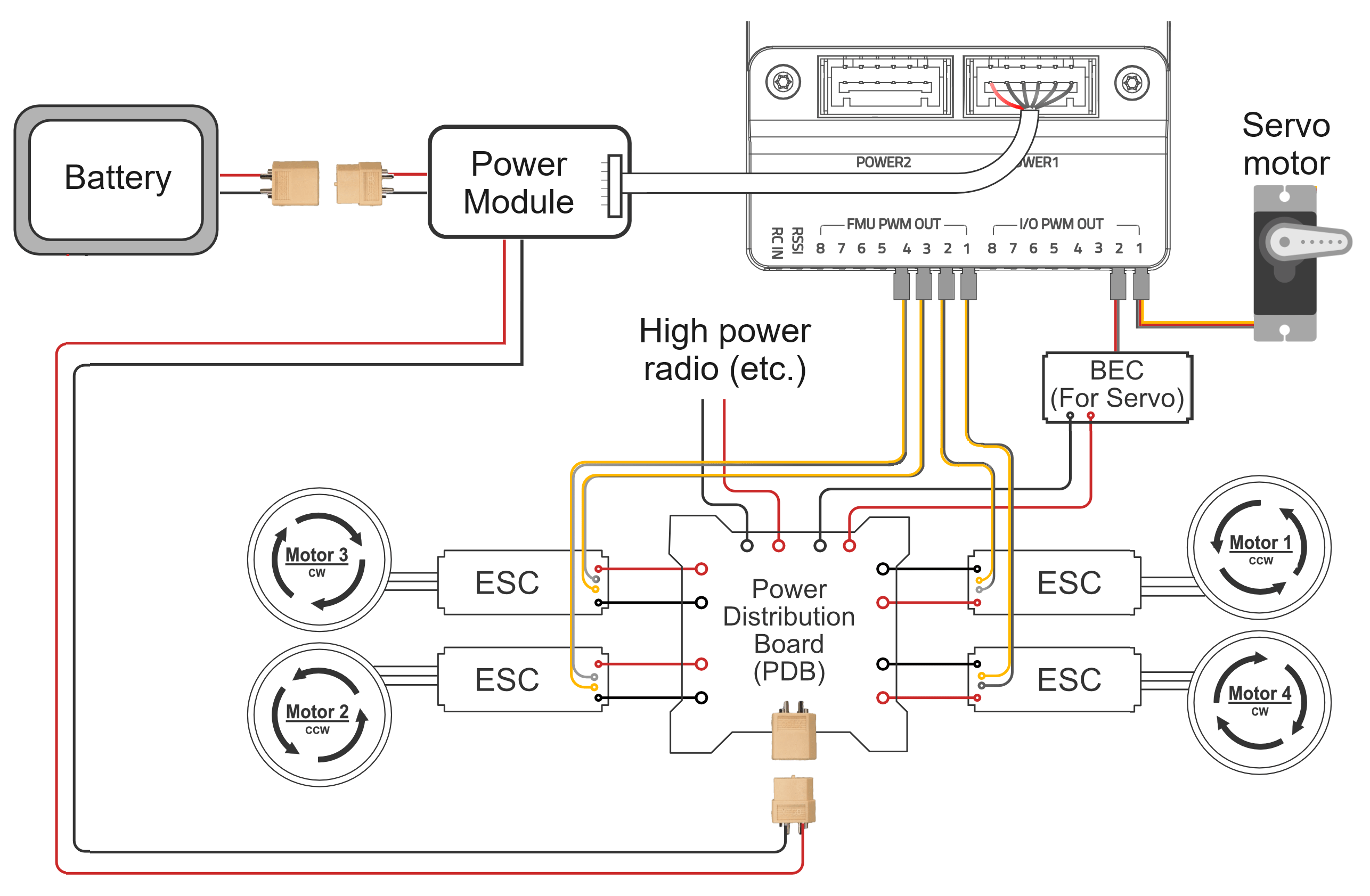
以下各节将更详细地解释每个部分。
TIP
如果使用DroneCAN电调,控制信号将连接到CAN总线,而非如图所示的PWM输出。
飞行控制器电源
Pixhawk FC需要一个稳压电源,可提供约5V/3A的连续电流(请查看您的特定FC!)。这足以给控制器本身及一些低功耗外围设备供电,如GNSS模块、RC发射器和低功率遥测电台,但不足以给电机、执行器和其他外围设备供电。
电源模块通常用于为FC“分出”此稳压电源,并提供电池电压和整个系统总电流的测量值——PX4可利用这些数据估计电量水平。电源模块连接到FC电源端口,通常标记为POWER(对于有冗余电源的FC,可能标记为POWER 1或