Pixracer接线指南
WARNING
PX4 不生产此(或任何)自动驾驶仪。 若需硬件支持或解决合规性问题,请联系制造商。
WARNING
内容建设中
本快速入门指南展示了如何为 Pixracer 飞行控制器供电,并连接其最重要的外围设备。

接线指南/组装
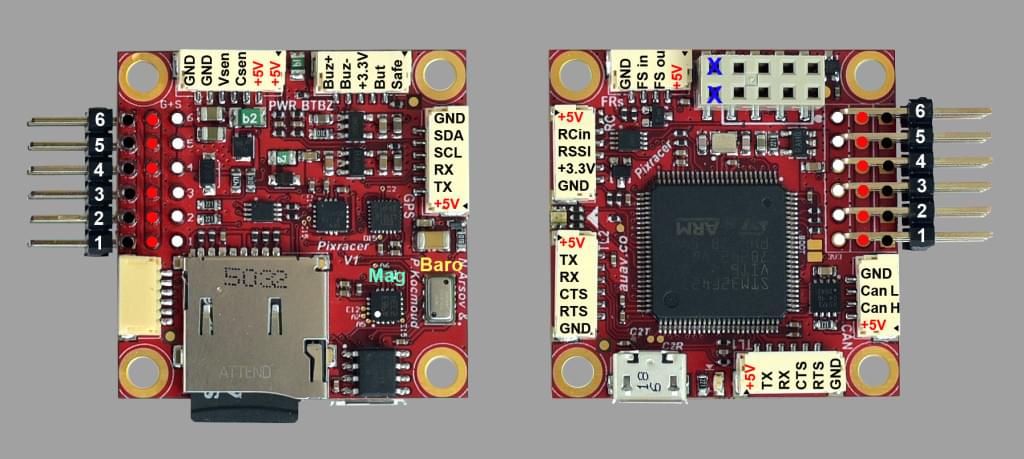
主要设置

遥控器
如果您想手动控制您的飞行器(PX4进行自主飞行模式时不需要无线电系统),则需要一个遥控(RC)无线电系统。
您需要选择兼容的发射器/接收器,然后将它们“绑定”,以便它们能够通信(请阅读您所使用的特定发射器/接收器附带的说明)。
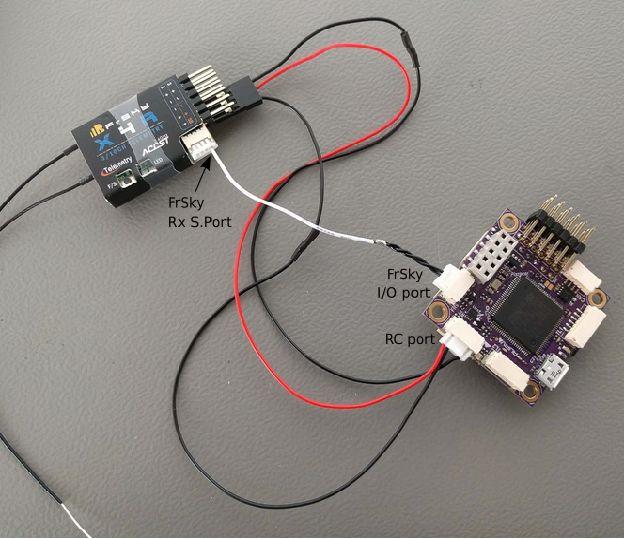
以下说明展示了如何连接不同类型的接收器:
- Frsky的接收机通过所示的端口连接,并可以使用提供的I/O连接器。

- PPM-SUM和S.BUS接收器连接到RCIN端口。
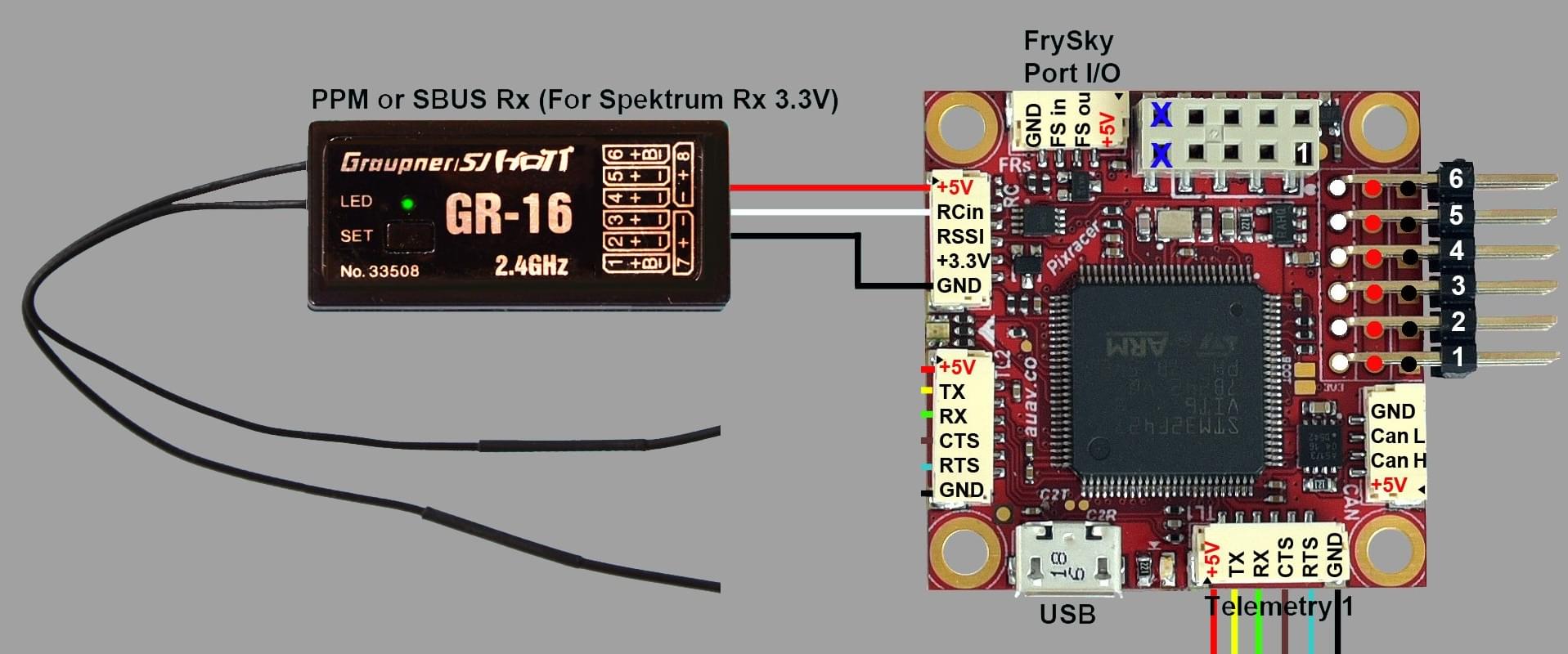
- 每个通道都有单独电线的PPM和PWM接收器必须通过这样的PPM编码器连接到RCIN端口(PPM-Sum接收器所有通道使用一根信号电线)。
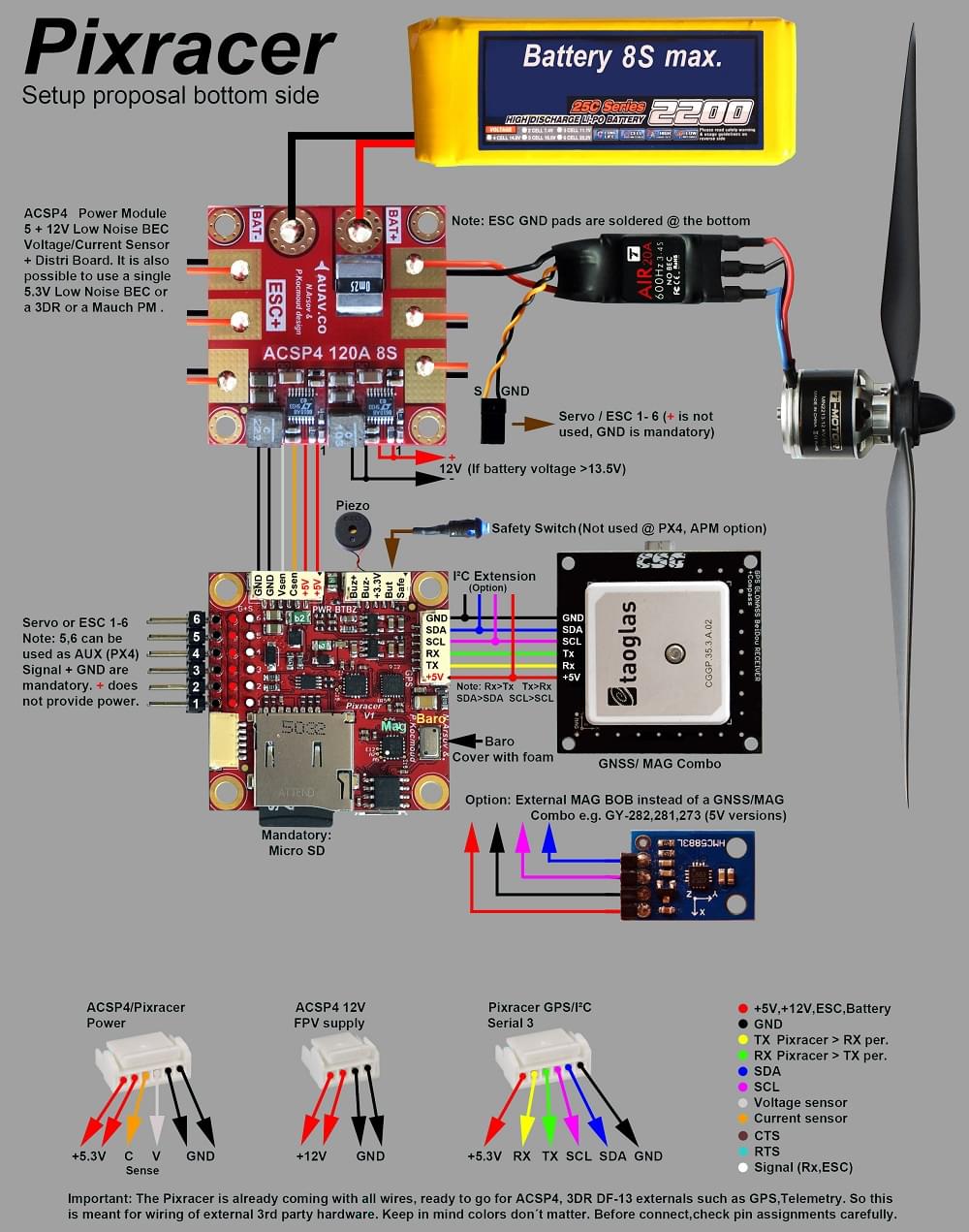
电源模块 (ASCP4)

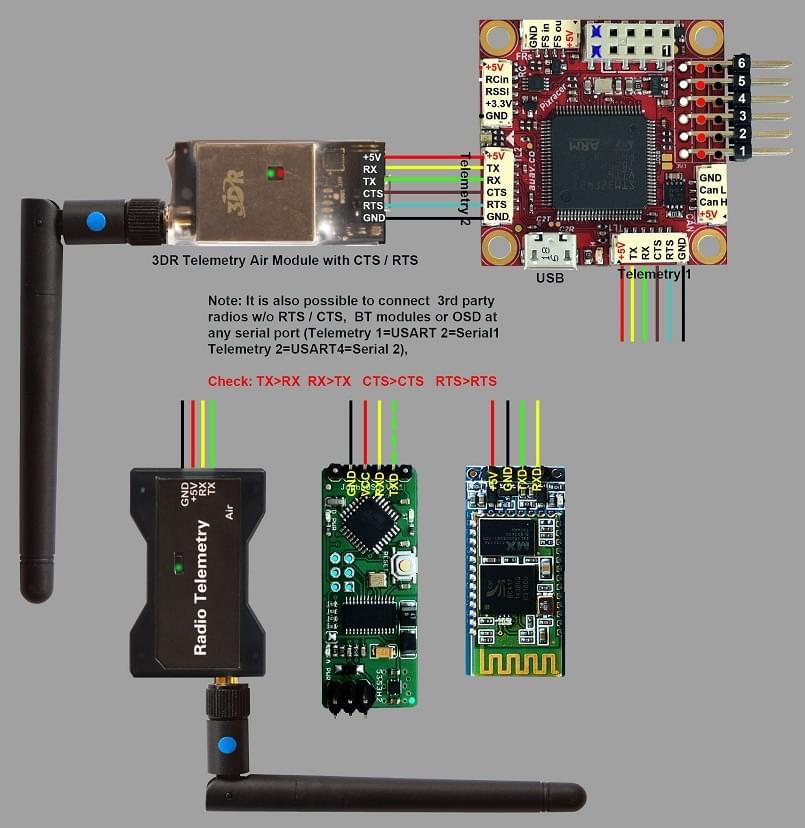
外部遥测
Pixracer 内置了WiFi,但也支持通过连接到 TELEM1 或 TELEM2 端口的外部WiFi或无线电遥测模块进行遥测。 如下图接线图所示。
INFO
必须使用 MAV_2_CONFIG 参数将 TELEM2 端口配置为第二个MAVLink实例。 更多信息请参阅 MAVLink 外设 > MAVLink 实例(以及 串口配置)。