Holybro X500 V2 + Pixhawk 6C(PX4开发套件)
本主题提供了组装Holybro X500 V2 ARF套件(也称为Holybro PX4开发套件)的完整说明。

组装
INFO
- 可点击本文档中的图片观看该步骤的YouTube视频。
- 每个部分开头都会列出所需螺丝。
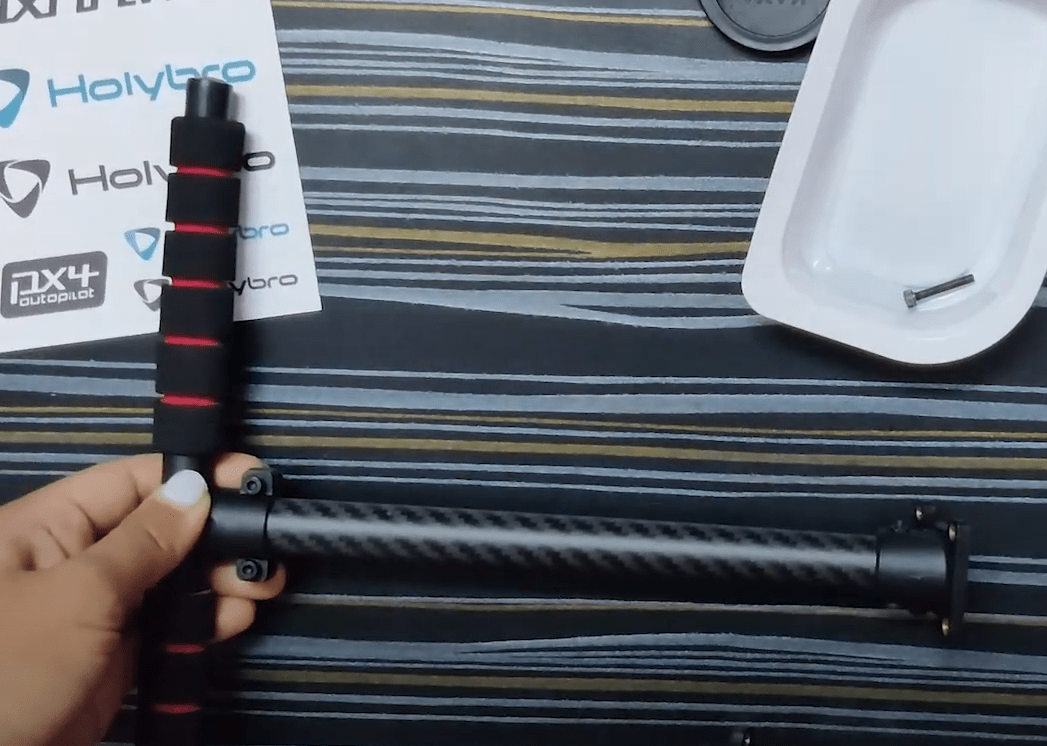
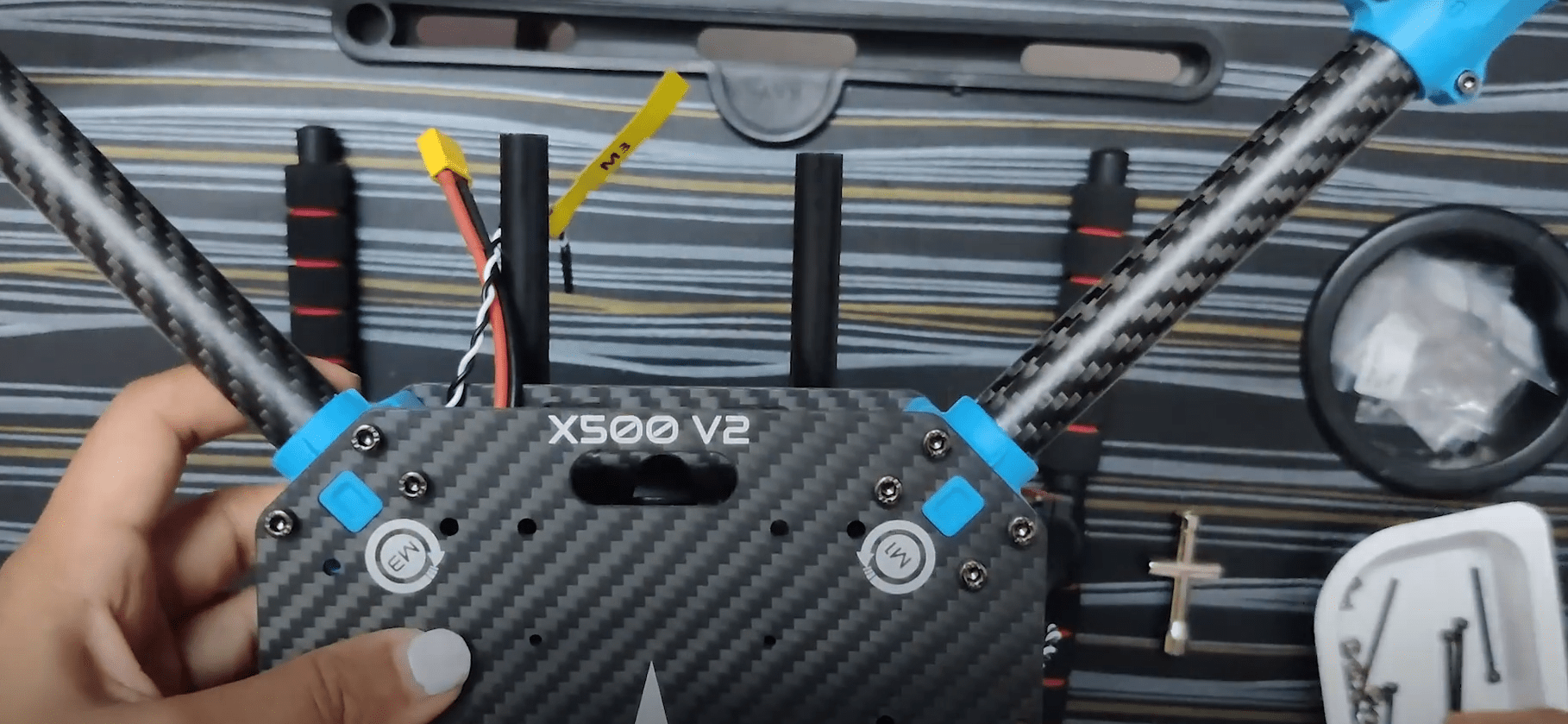
有效载荷与电池支架
螺丝 - 沉头螺丝M2.5×6,12颗
- 将悬挂橡胶圈垫片分别插入对应的悬挂件中。请勿使用尖锐物体按压橡胶圈。

- 取电池安装板,使用沉头螺丝M2.5×6将其与滑杆夹固定。

- 用沉头螺丝M2.5×6将4个悬挂件拧到平台板上。
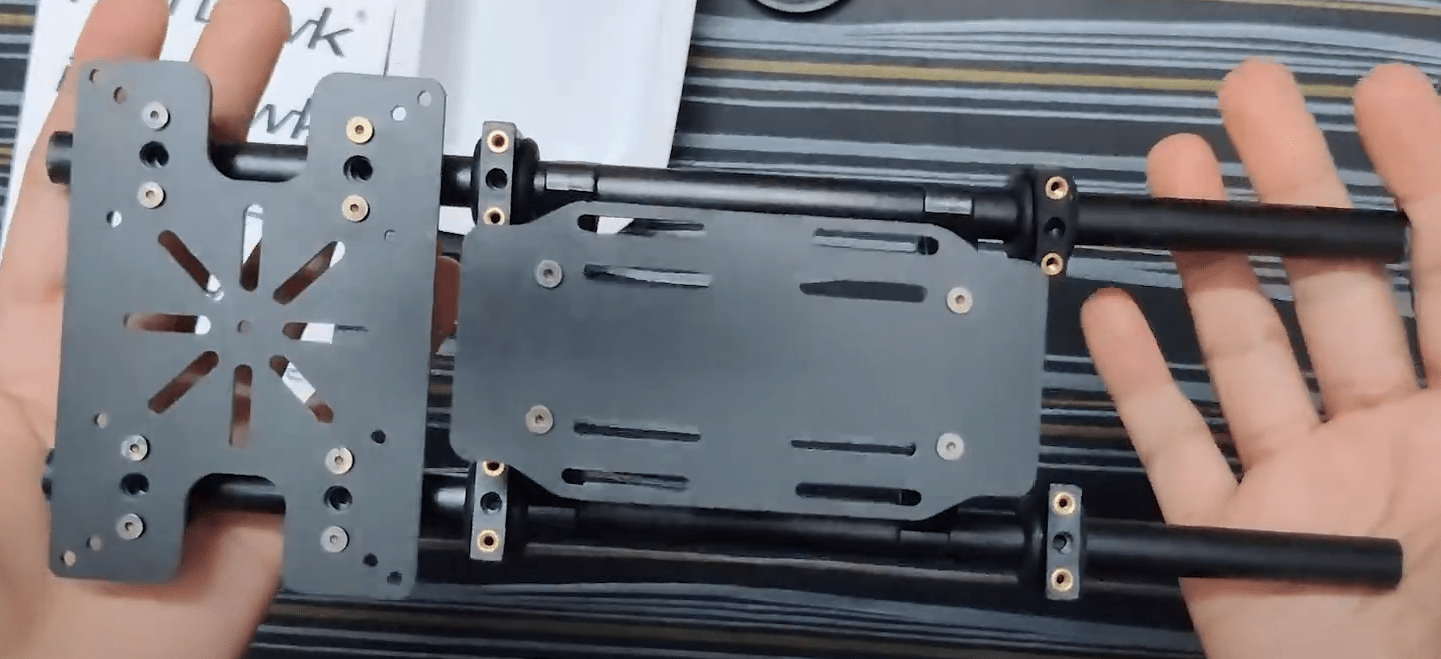 )
) - 取滑杆,插入4个悬挂件,以便稍后拧到底板上。
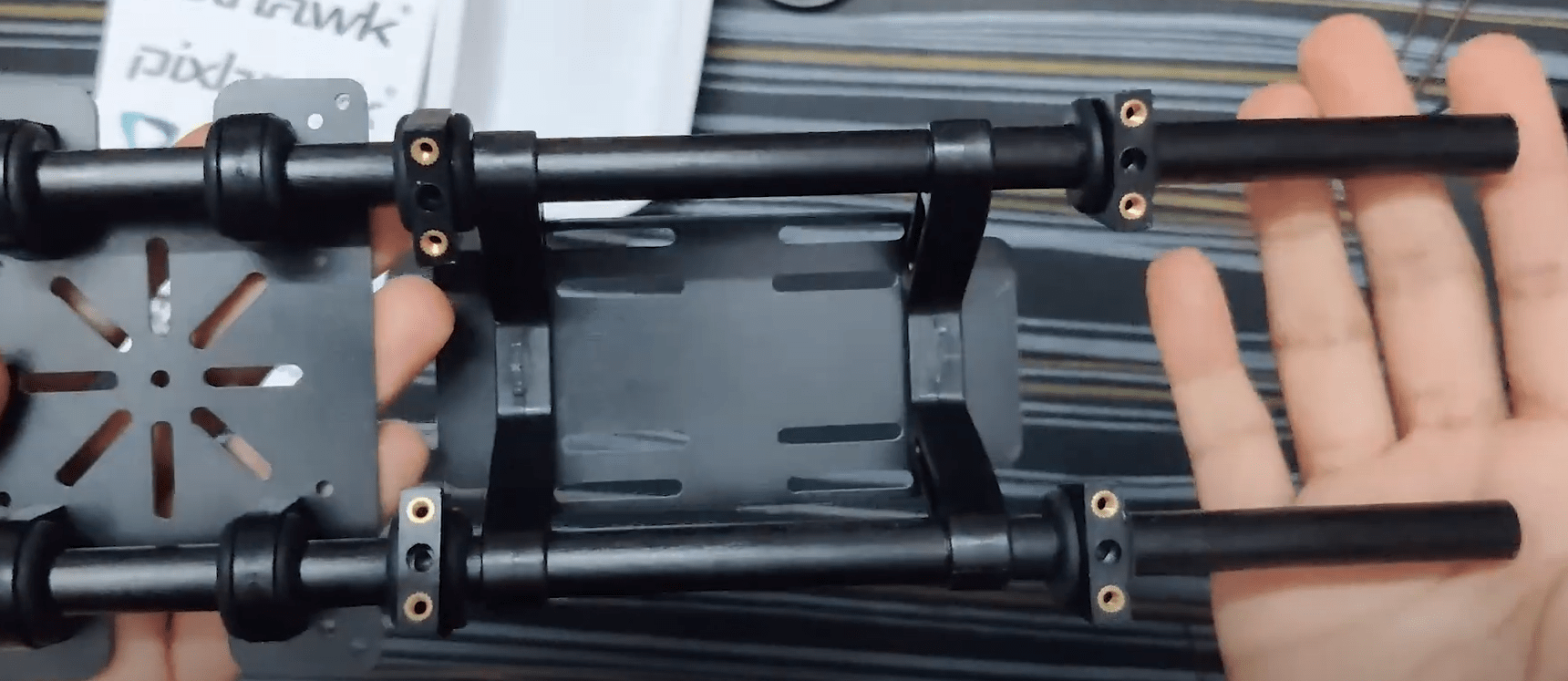 )
) - 现在插入在步骤2和3中组装好的电池支架和有效载荷支架。
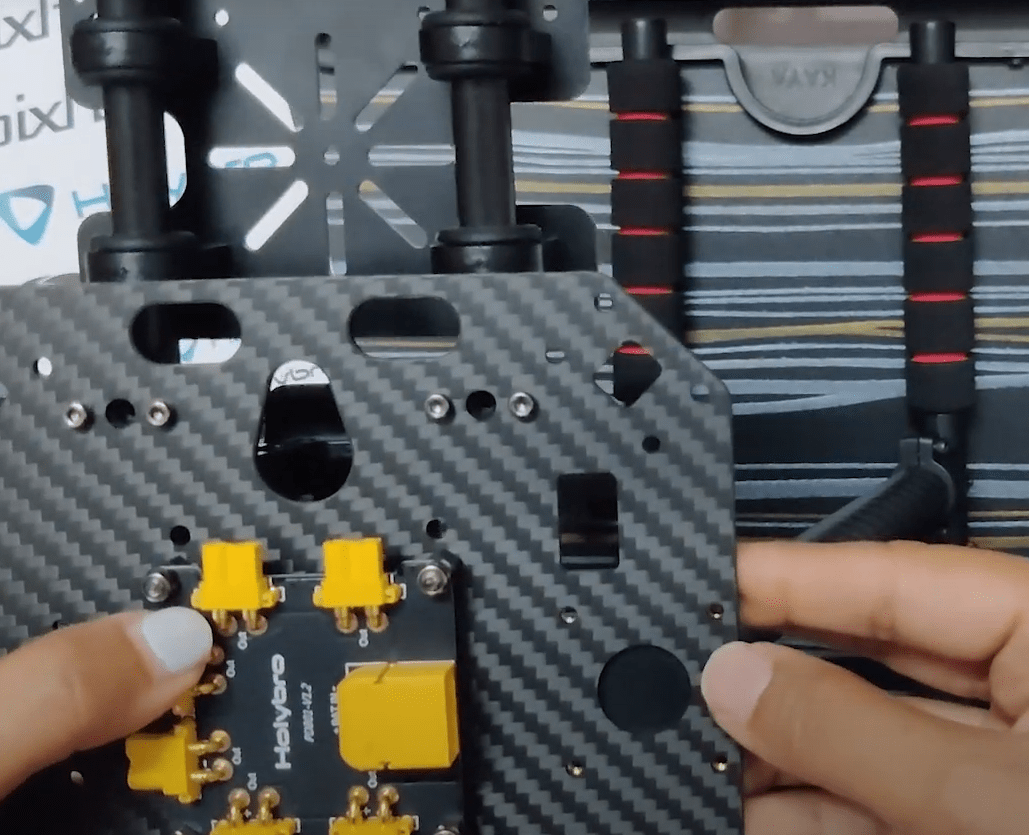
电源模块
螺丝 - 内六角圆柱头螺丝M2.5_6,8颗 | 锁紧螺母M3,4颗 | M3_5尼龙柱,4颗 | 螺丝M3×14,4颗 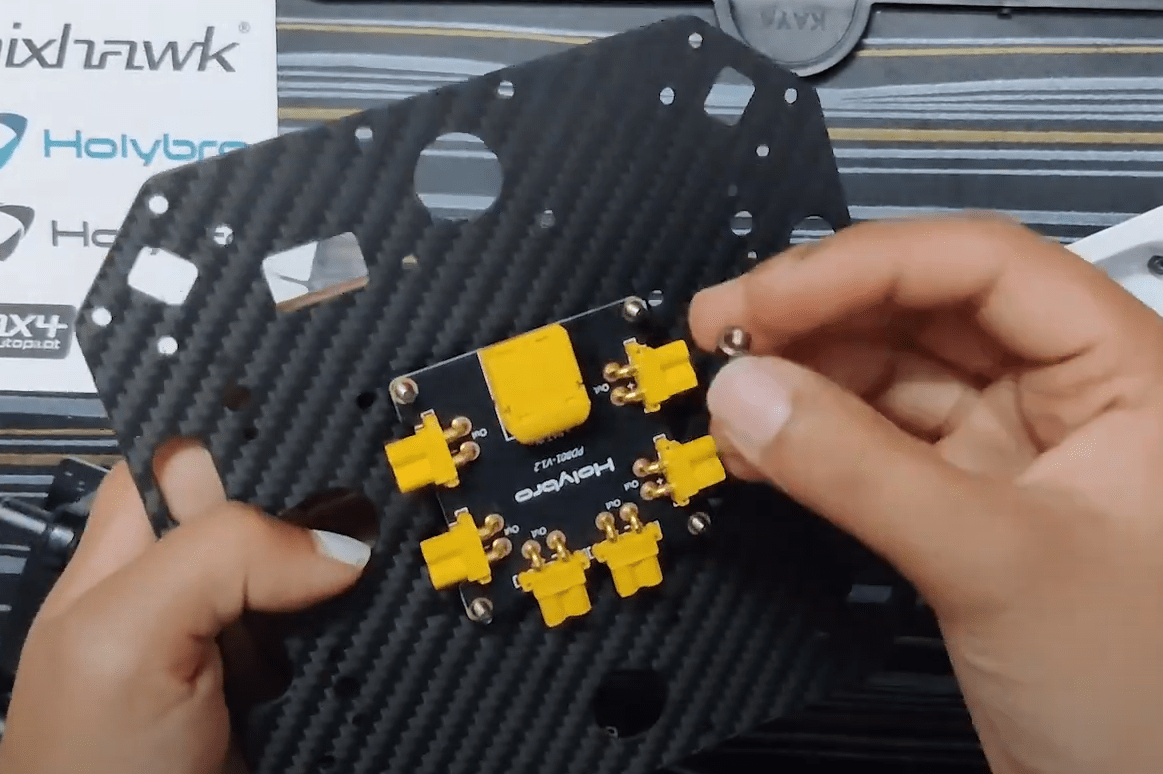 )
)
- 取底板,插入4颗M3×14螺丝,并在上面固定好尼龙柱。
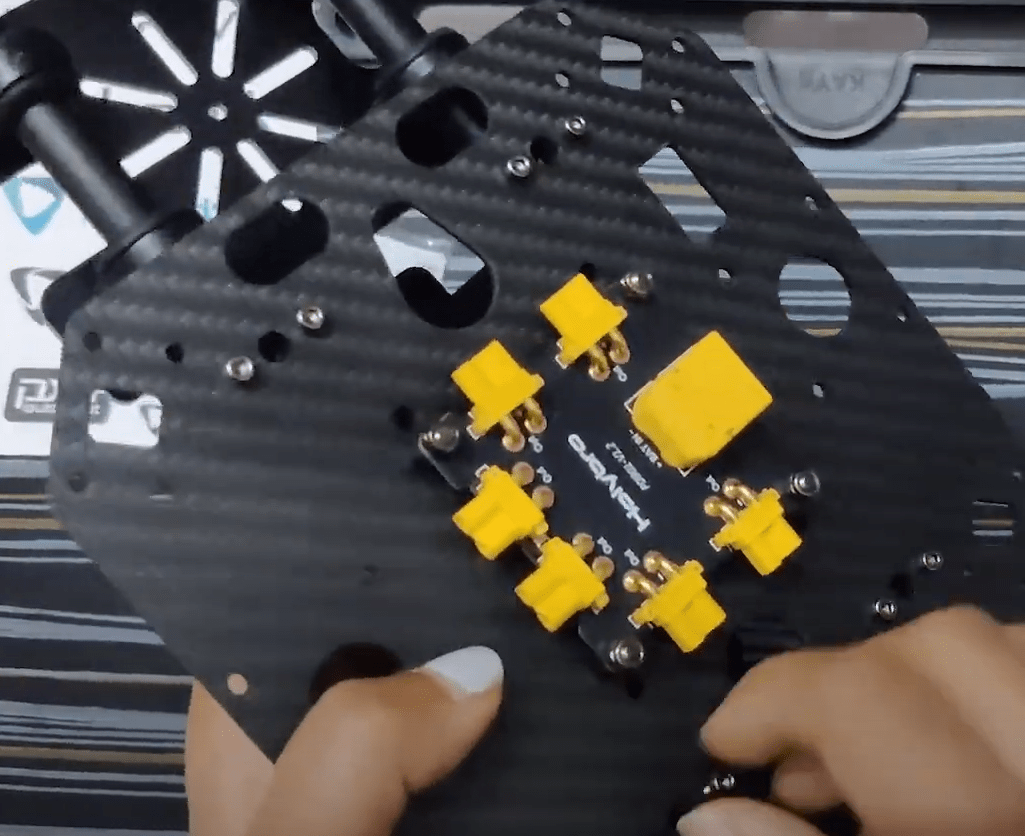
- 放置电源分配板,并用锁紧螺母组装。电源模块PM02(用于Pixhawk 6C)将为该板供电。
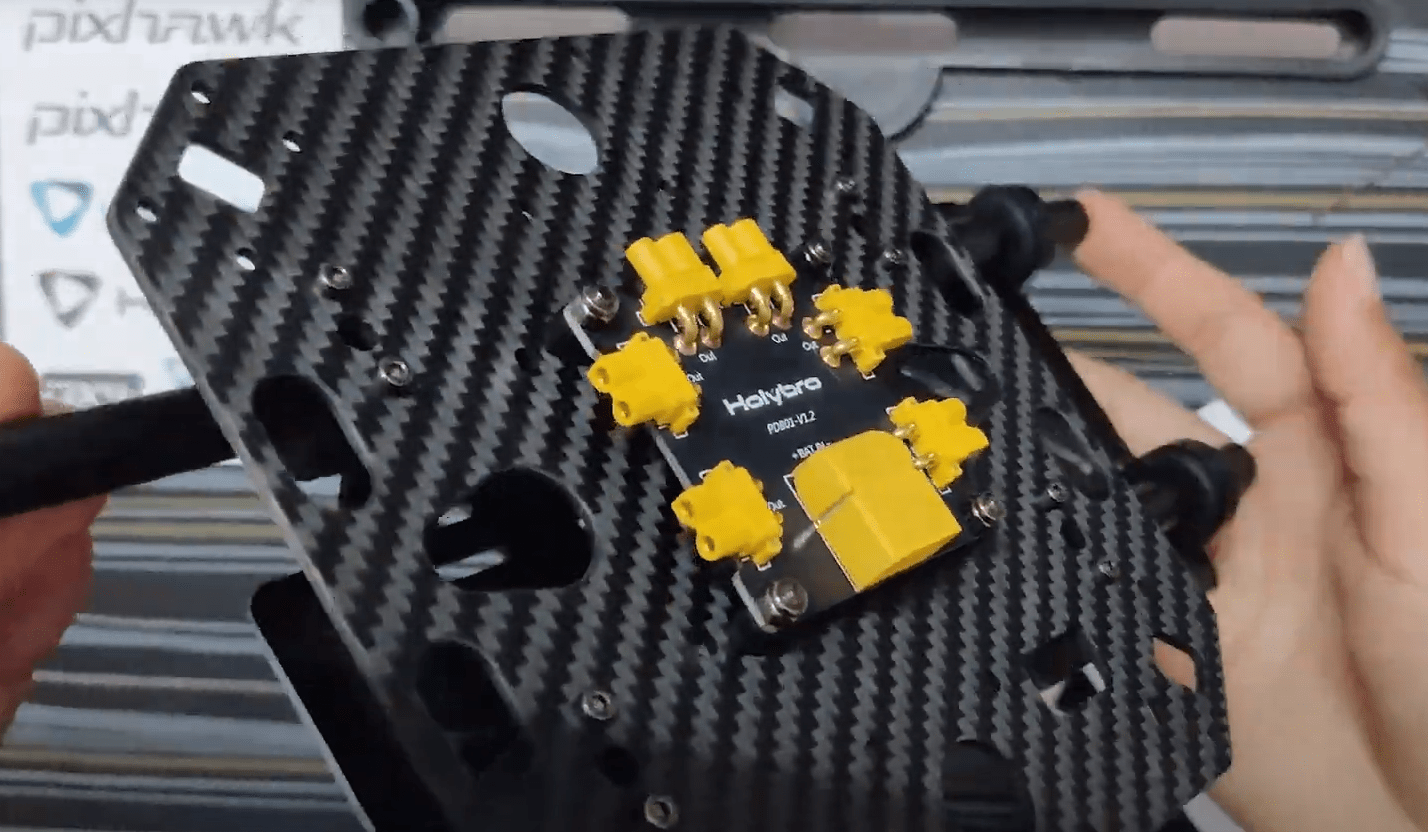
- 使用内六角圆柱头螺丝M2.5×6,将底板拧到4个悬挂件上(即在有效载荷支架组装第三步中插入两根杆上的悬挂件)。
起落架
- 组装起落架时,松开起落架横杆上预组装的螺丝,插入起落架垂直杆并拧紧。

- 用内六角圆柱头螺丝M3×8将起落架拧到底板上。
由于顶板组装好后再插入电线会很麻烦,所以最好事先布线。不过,该设计也允许之后再布线。 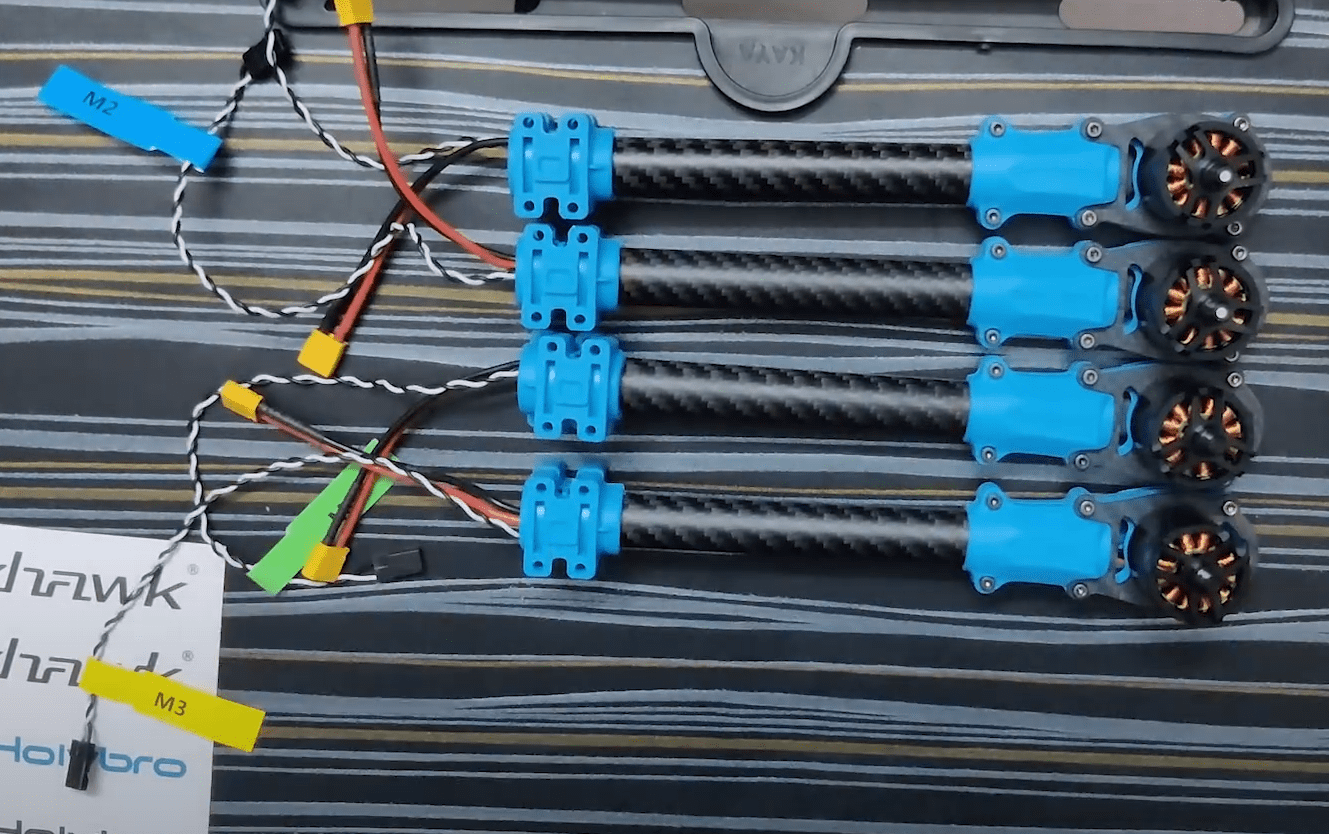
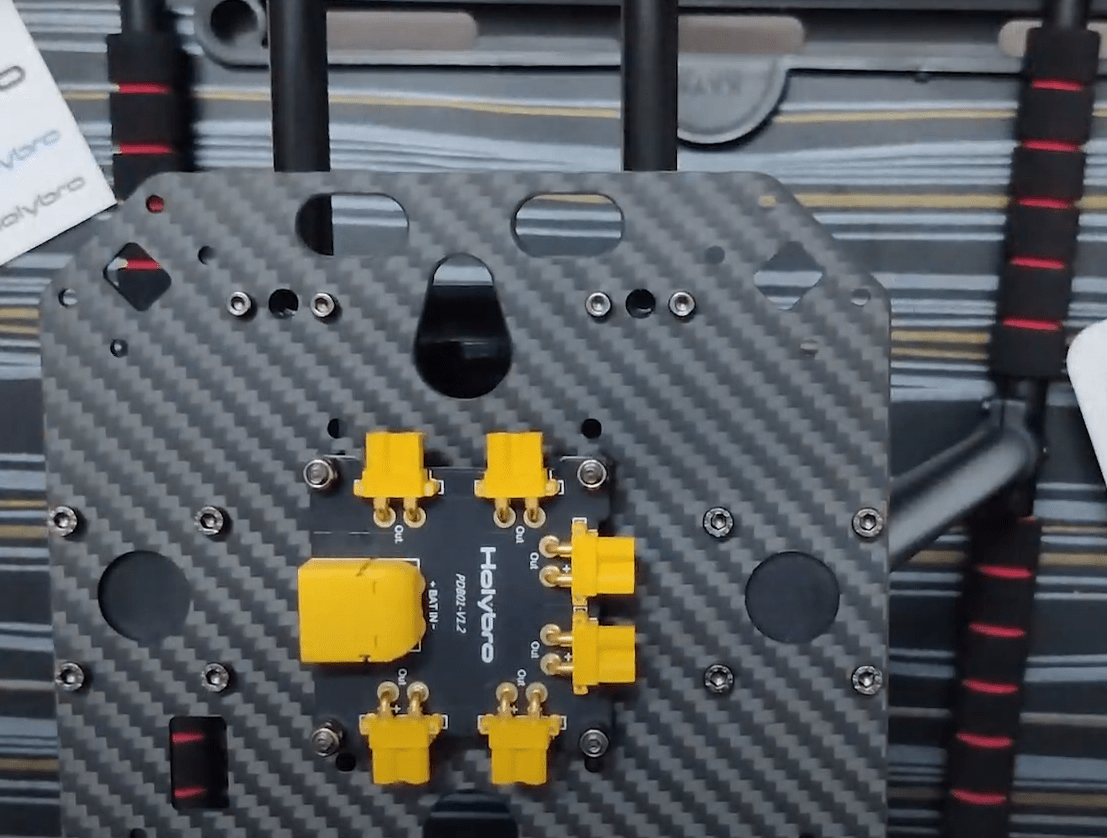
电源
在本案例中,Pixhawk 6C由电源模块PM02供电。该电源模块由一块电池(4S 16.8V 5200 mAh)供电。
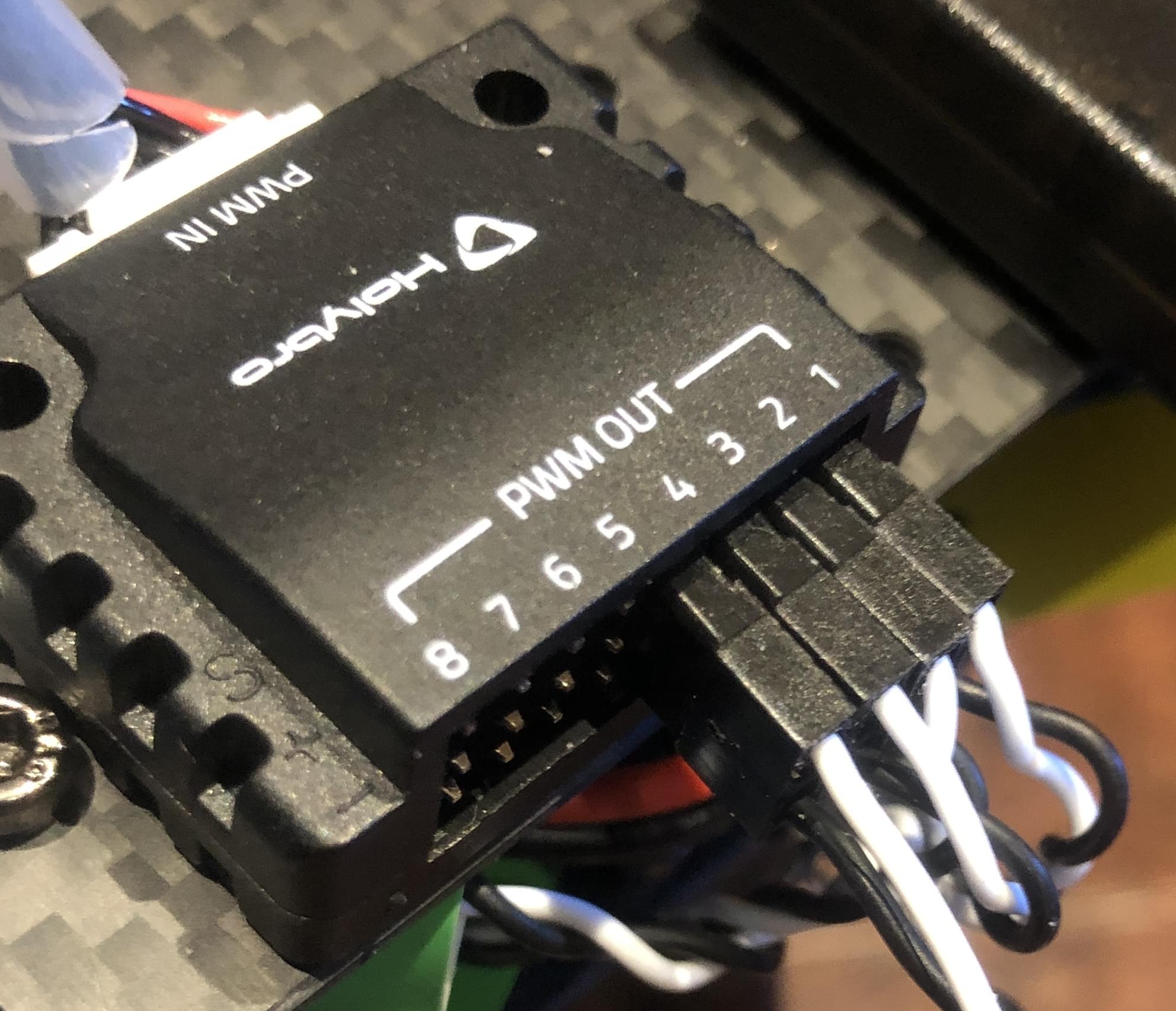
电机通过电源分配板供电,如下图所示。
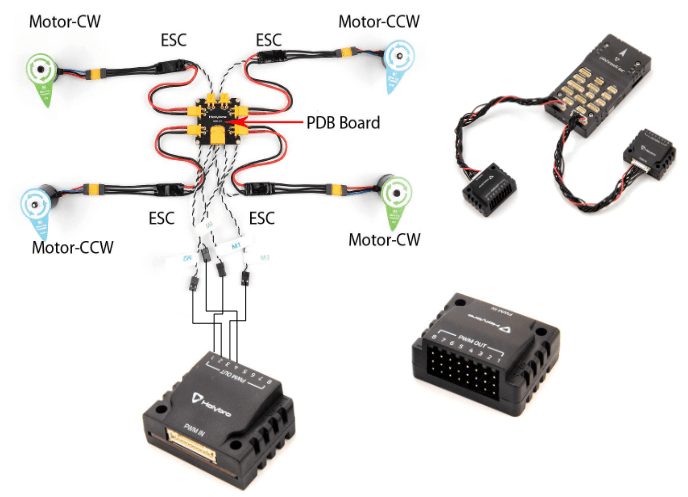
请注意,电调(ESC)连接器有颜色编码,必须插入PWM输出接口,且白色线缆朝上。
机臂
螺丝 - 内六角圆柱头螺丝M3×38,16颗 | 法兰锁紧螺母M3,16颗 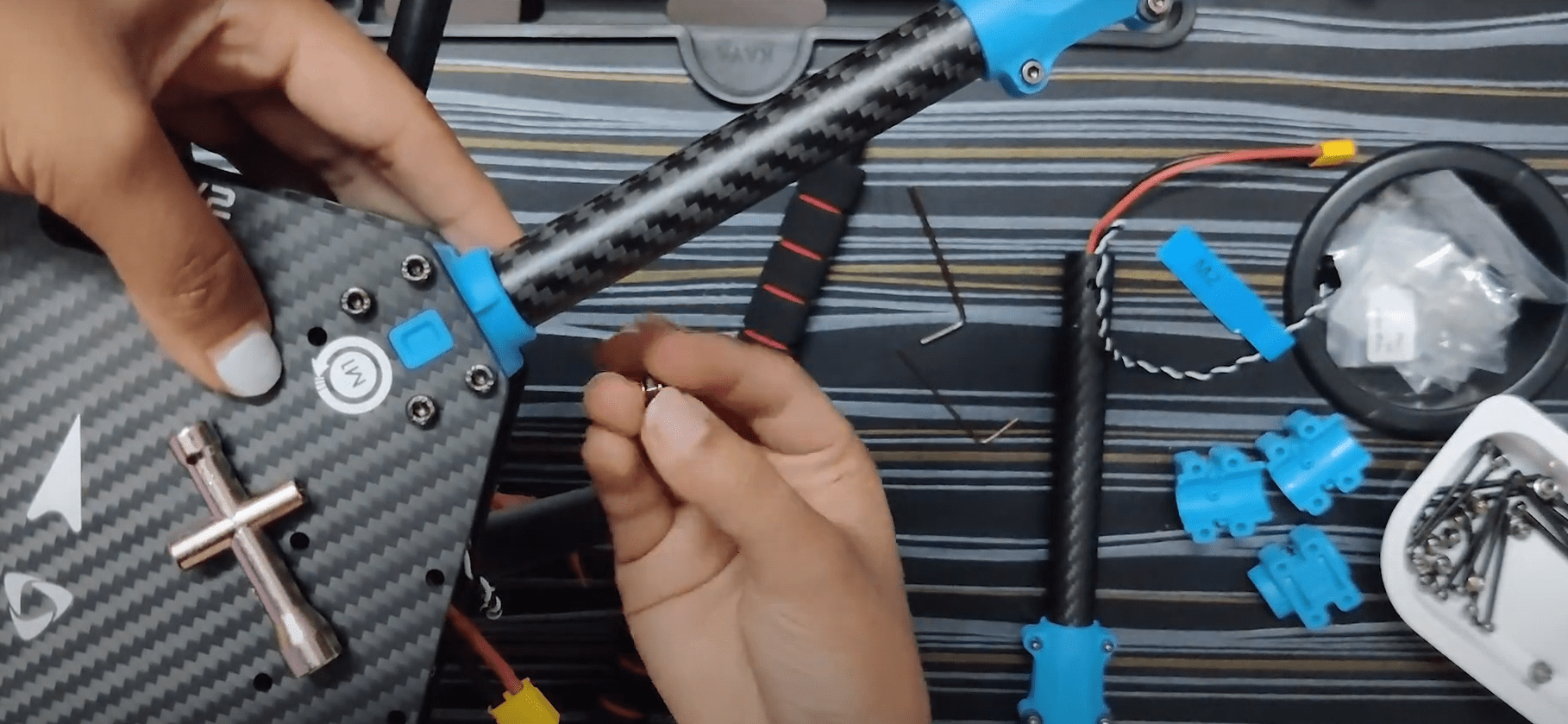
- 安装机臂相当简单,因为电机已预先组装好。
- 确保将编号正确的机臂及其电机安装在相应的一侧。

- 确保将编号正确的机臂及其电机安装在相应的一侧。
TIP
使用内六角扳手或任何细长物品,从螺栓另一侧插入,以便拧紧螺栓。
- 取一根机臂,将矩形型材插入底板上的矩形凹槽内。
- 在将顶板安装到这个三件组合(底板、顶板和机臂)上时,需使用内六角圆柱头螺丝M3×38和法兰锁紧螺母M3进行固定。
- 使用开发套件中提供的小型十字扳手固定一侧。

- 在所有3个电机就位之前,请勿拧紧任何螺丝,否则在安装第3个和第4个电机时可能会遇到困难。

螺旋桨
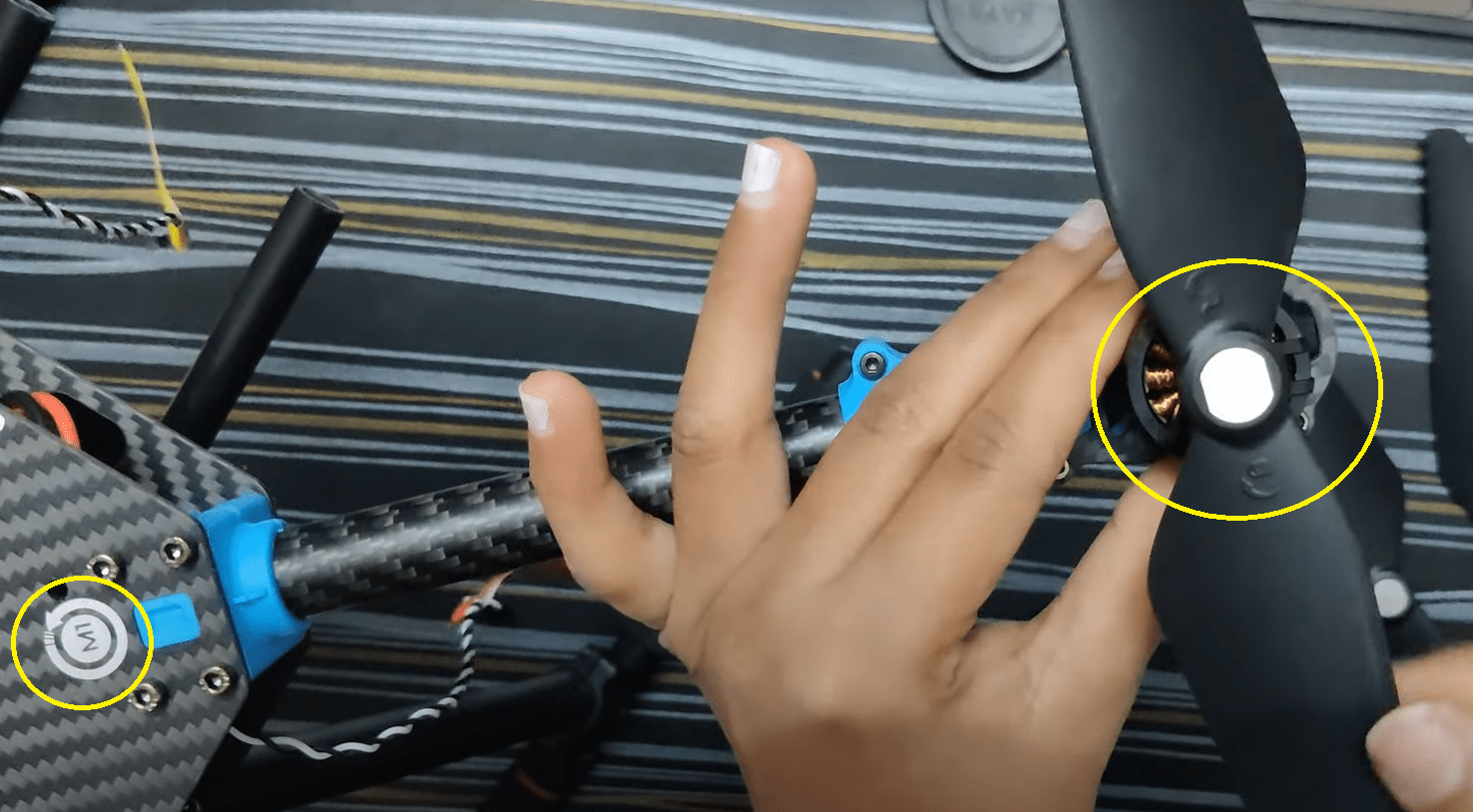
- 底板标明了电机的方向。
- 带有白色/银色涂层的螺旋桨安装在具有相同涂层的相应电机上。
- 螺旋桨上标明了其解锁和锁定的方向。
- 牢记以上三点,将4个螺旋桨安装到电机上。
以下部件可按常规方式安装。
GPS
螺丝 - 锁紧螺母M3,4颗 | 螺丝M3×10,4颗
- 按照视频组装GPS。
 本指南采用Holybro指南中建议的GPS安装位置。
本指南采用Holybro指南中建议的GPS安装位置。 - 使用锁紧螺母M3和螺丝M3×10将GPS支架的底端拧在有效载荷支架一侧。
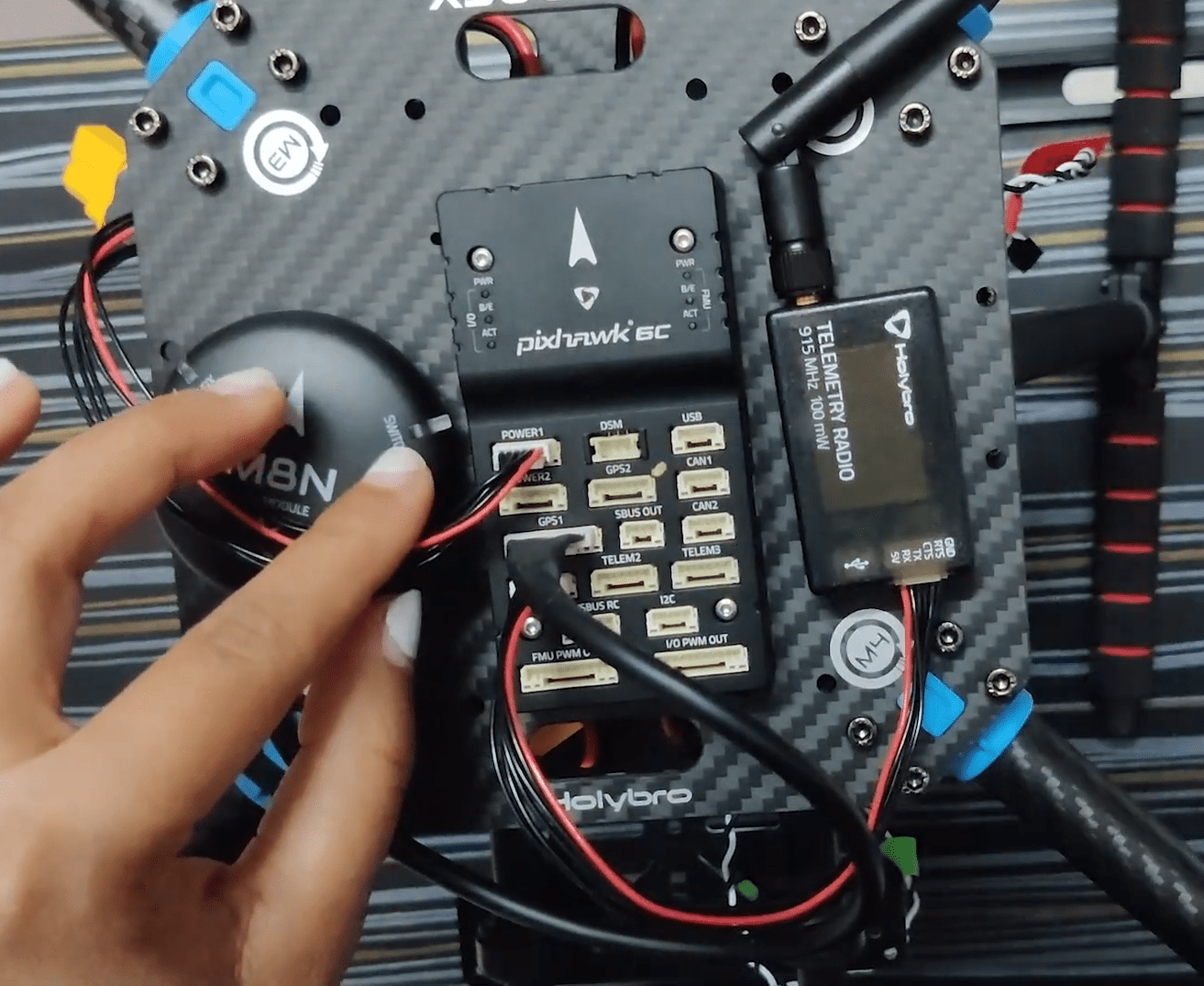
Pixhawk 6C
- PM02的电线连接到Pixhawk的POWER1接口。
- 遥测线连接到TELEM1接口。
- GPS连接到GPS1接口。
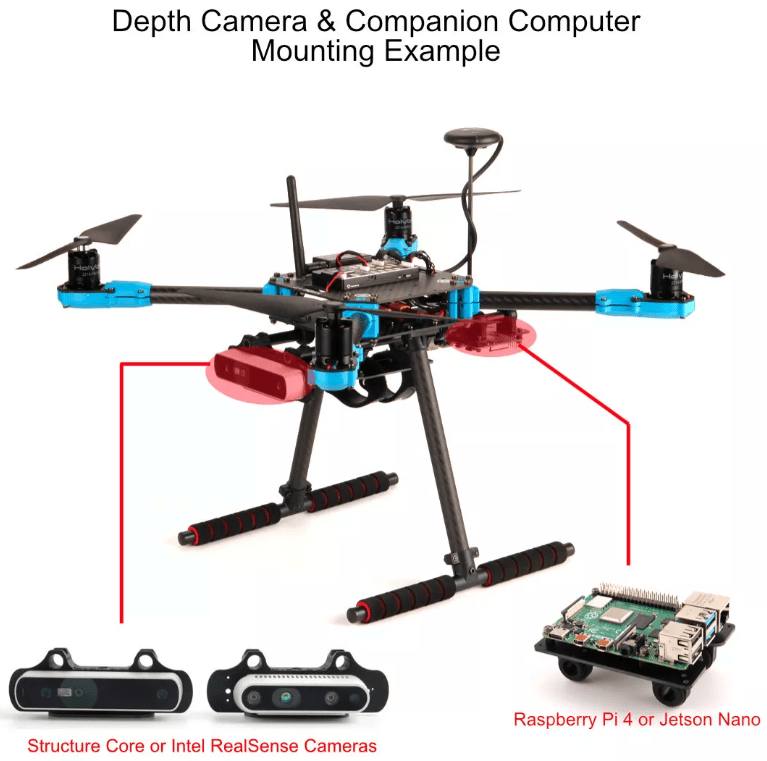
配套计算机(可选)
螺丝 - 内六角圆柱头螺丝M2.5_12,4颗 | M2.5_5尼龙柱,4颗 | 锁紧螺母M2.5,4颗 X500套件为配套计算机提供了空间,例如树莓派(Raspberry Pi)或英伟达Jetson nano可安装在此处(待确认)。
- 插入4颗内六角圆柱头螺丝M2.5×12,并在上面安装尼龙柱。
- 现在放置配套计算机,并用锁紧螺母M2.5进行组装。
相机
- 诸如英特尔实感(Intel Realsense)深度/跟踪相机或Structure Core等相机,可使用深度相机支架进行安装。
- 只需将支架插入两根杆内,并根据所使用的相机选择合适的螺丝进行固定。
安装/配置PX4
TIP
安装和配置PX4的完整说明可在基础配置中找到。
使用_QGroundControl_安装PX4自动驾驶仪,并针对X500机架进行配置和调校。根据你的平台下载并安装 QGroundControl。
首先更新固件、机架和执行器映射:
- 固件
- 机架 你需要选择“Holybro X500 V2”机架(四旋翼X型 > Holybro 500 V2)。
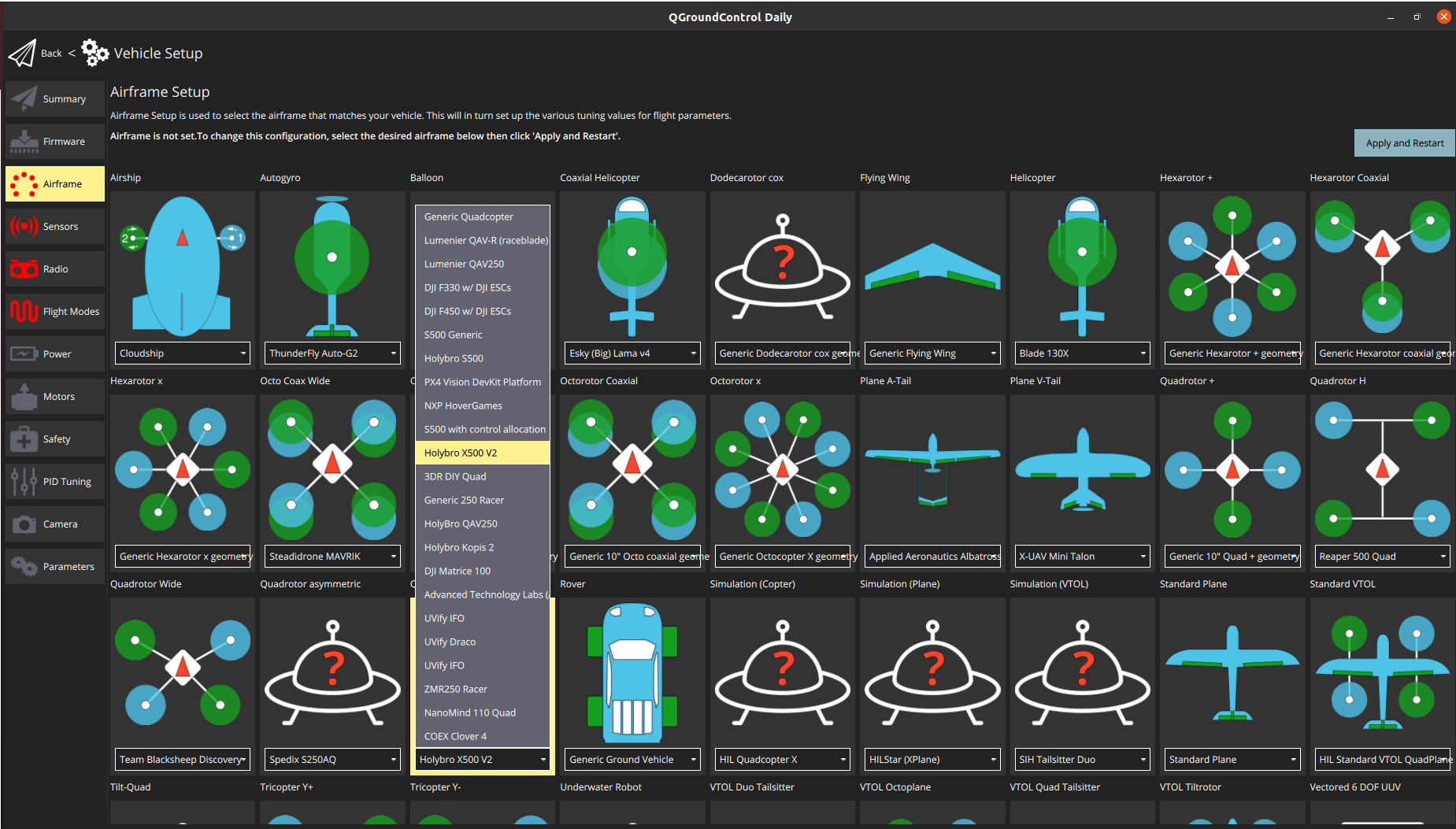
- 执行器
- 通常无需更新飞行器几何参数(因为这是一个预配置的机架)。
- 根据布线情况,将执行器功能分配到相应输出。该机架已预先配置,电机连接在FMU PWM输出上。
- 使用滑块测试配置。
然后进行必要的设置/校准:
理想情况下,你还应进行以下操作:
调试
机架选择会为该机架设置自动驾驶仪的_默认_参数。这些参数足以实现飞行,但针对特定机架组装进行参数调校是个不错的做法。
有关如何进行调校的说明,请从自动调校(多旋翼)开始阅读。
致谢
本组装记录由Akshata和Hamish Willee提供,非常感谢Holybro和Dronecode在硬件和技术支持方面的帮助。