Gazebo Classic 载具
本主题列出并展示了 PX4 Gazebo Classic 仿真环境 所支持的载具,以及运行这些载具所需的 make 命令(这些命令需在 PX4-Autopilot 目录下的终端中运行)。
支持的载具类型包括:多旋翼飞行器、垂直起降飞行器、尾坐式垂直起降飞行器、固定翼飞机、无人车、水下无人航行器(UUV)。
INFO
Gazebo Classic 页面 介绍了如何安装 Gazebo Classic、如何启用视频功能和加载自定义地图,以及许多其他配置选项。
多旋翼飞行器
四旋翼飞行器(默认)
sh
make px4_sitl gazebo-classic配备光流传感器的四旋翼飞行器
sh
make px4_sitl gazebo-classic_iris_opt_flow配备深度相机的四旋翼飞行器
这些模型配备了一个深度相机,基于英特尔® 实感™ D455 进行建模。
朝前的深度相机:
sh
make px4_sitl gazebo-classic_iris_depth_camera朝下的深度相机:
sh
make px4_sitl gazebo-classic_iris_downward_depth_camera3DR Solo(四旋翼飞行器)
sh
make px4_sitl gazebo-classic_solo
Typhoon H480(六旋翼飞行器)
sh
make px4_sitl gazebo-classic_typhoon_h480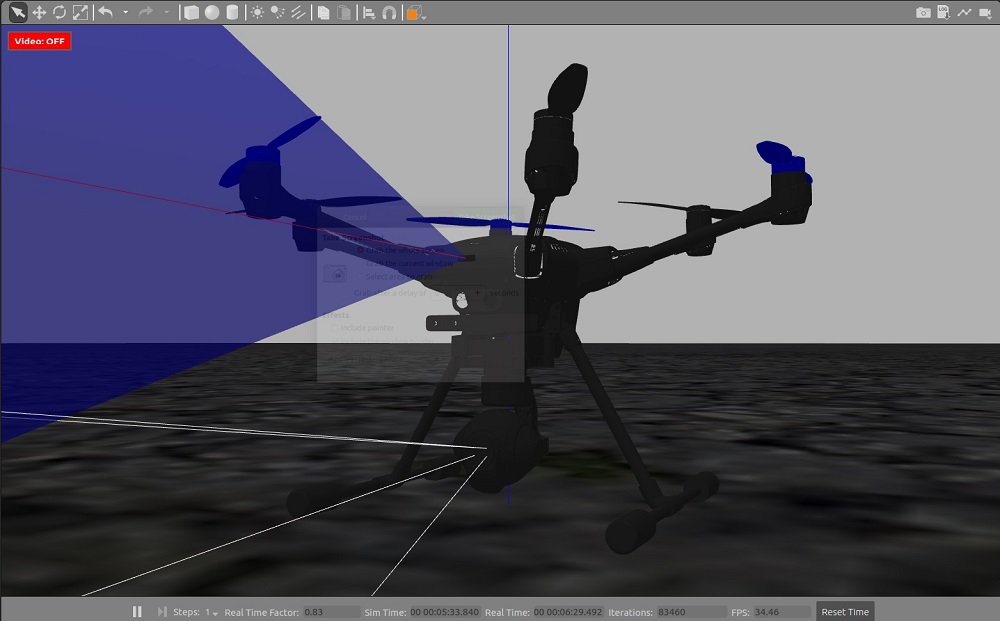
INFO
此目标还支持 视频流仿真。
固定翼飞机
标准固定翼飞机
sh
make px4_sitl gazebo-classic_plane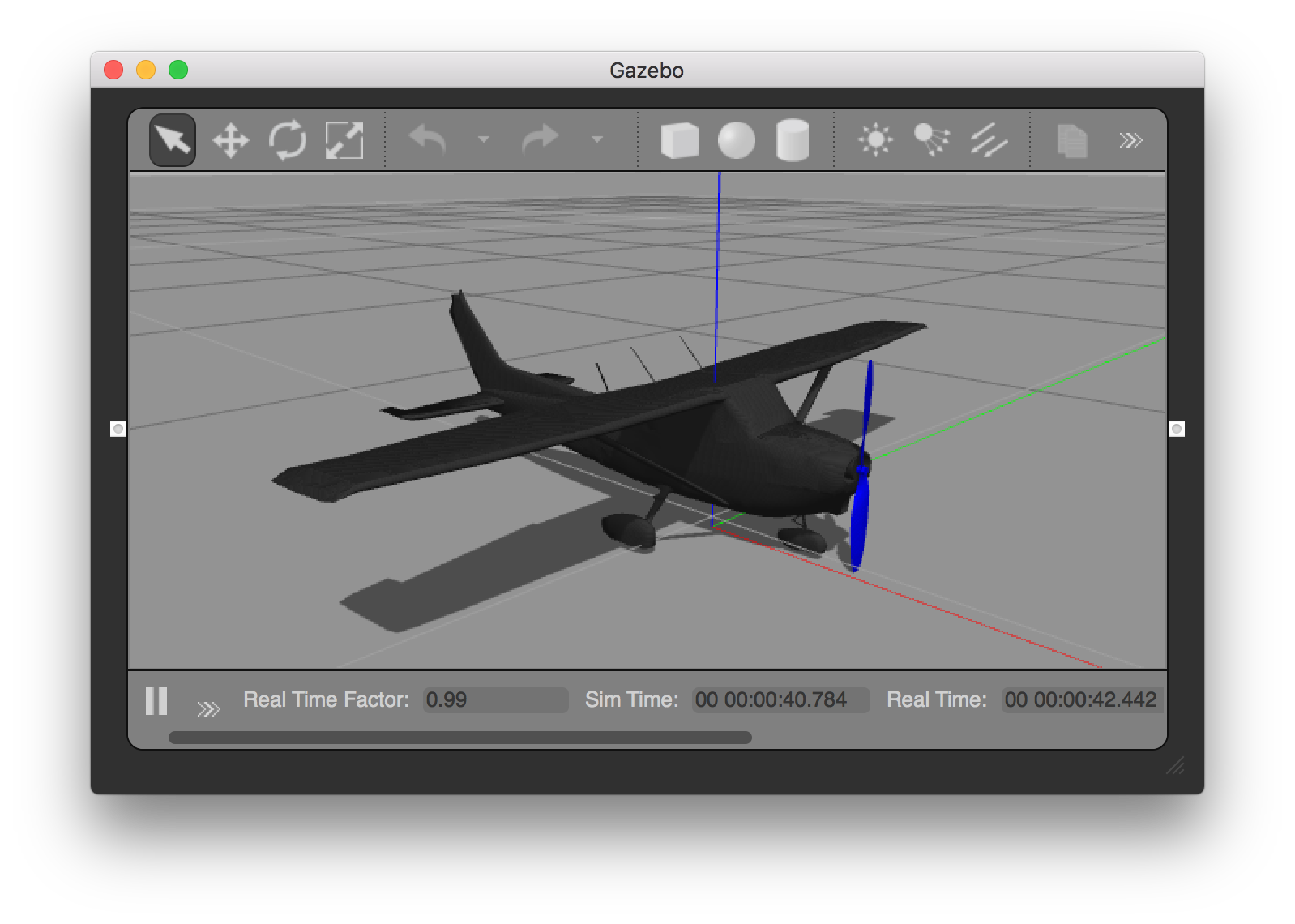
带弹射起飞功能的标准固定翼飞机
sh
make px4_sitl gazebo-classic_plane_catapult此模型模拟手抛/弹射起飞,可用于在位置模式、起飞模式或任务中进行 固定翼起飞。
一旦载具解锁,飞机将自动起飞。
垂直起降飞行器
标准垂直起降固定翼飞行器
sh
make px4_sitl gazebo-classic_standard_vtol
尾坐式垂直起降飞行器
sh
make px4_sitl gazebo-classic_tailsitter
无人地面车辆(UGV/无人车/汽车)
阿克曼转向无人地面车辆
sh
make px4_sitl gazebo-classic_rover
差速驱动无人地面车辆
sh
make px4_sitl gazebo-classic_r1_rover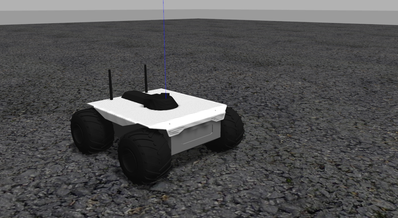
水下无人航行器(UUV/潜艇)
HippoCampus TUHH 水下无人航行器
sh
make px4_sitl gazebo-classic_uuv_hippocampus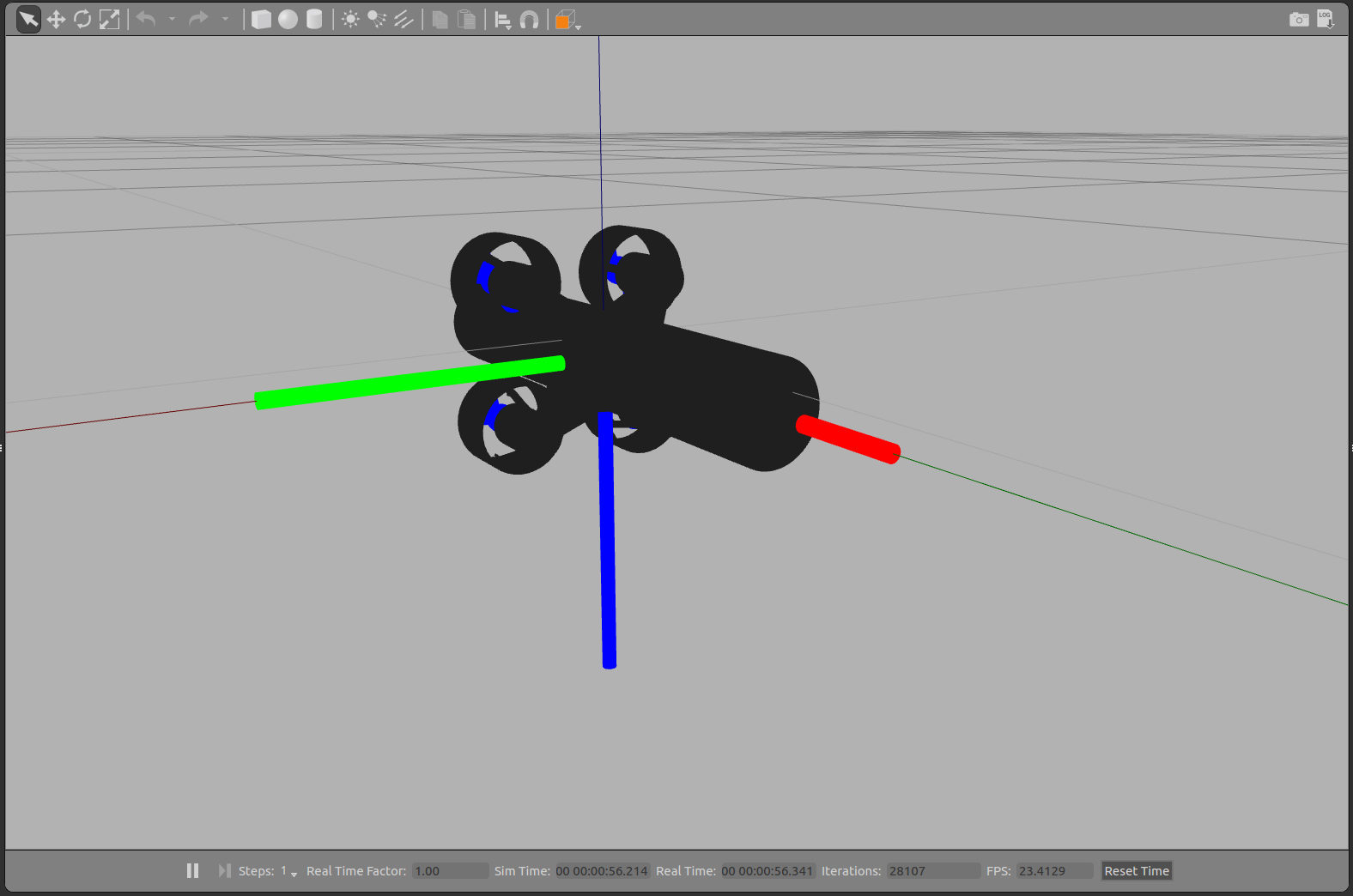
无人水面航行器(USV/无人船)
无人船(USV)
sh
make px4_sitl gazebo-classic_boat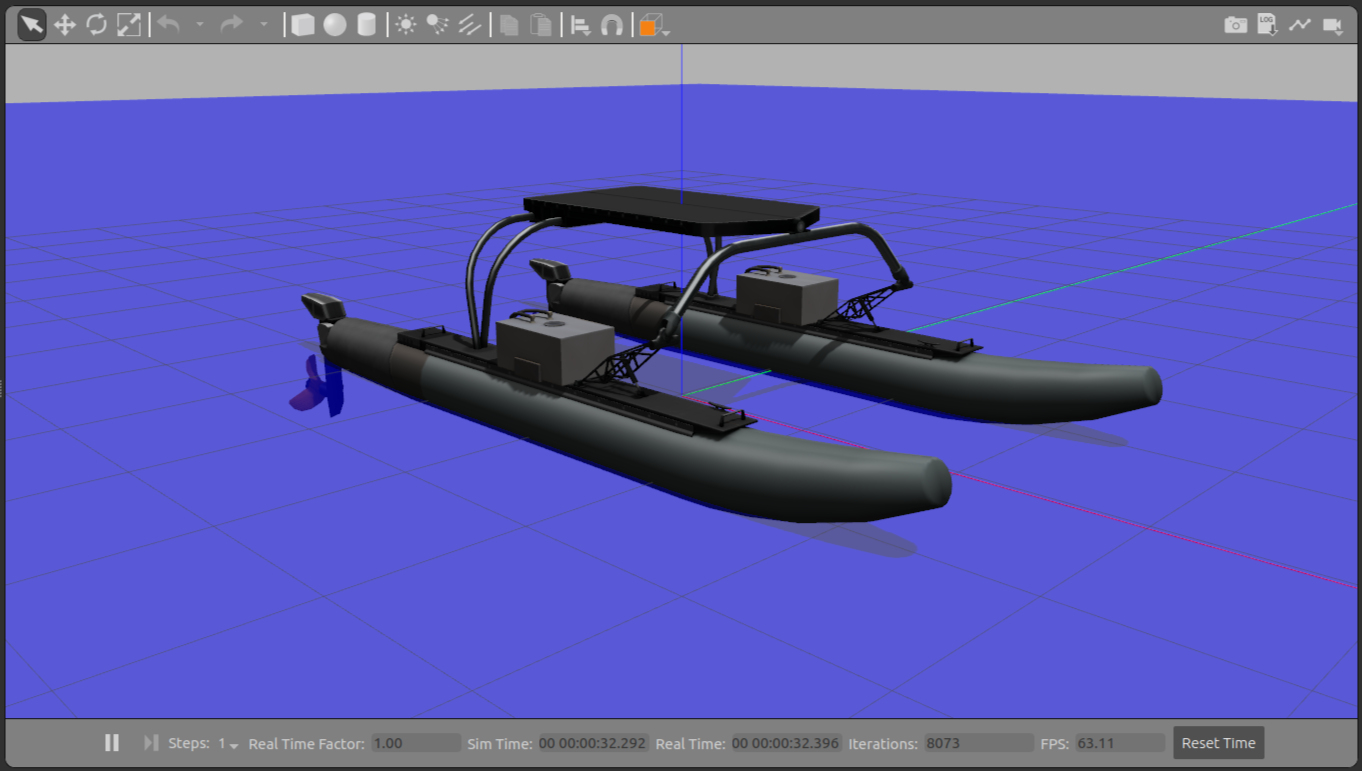
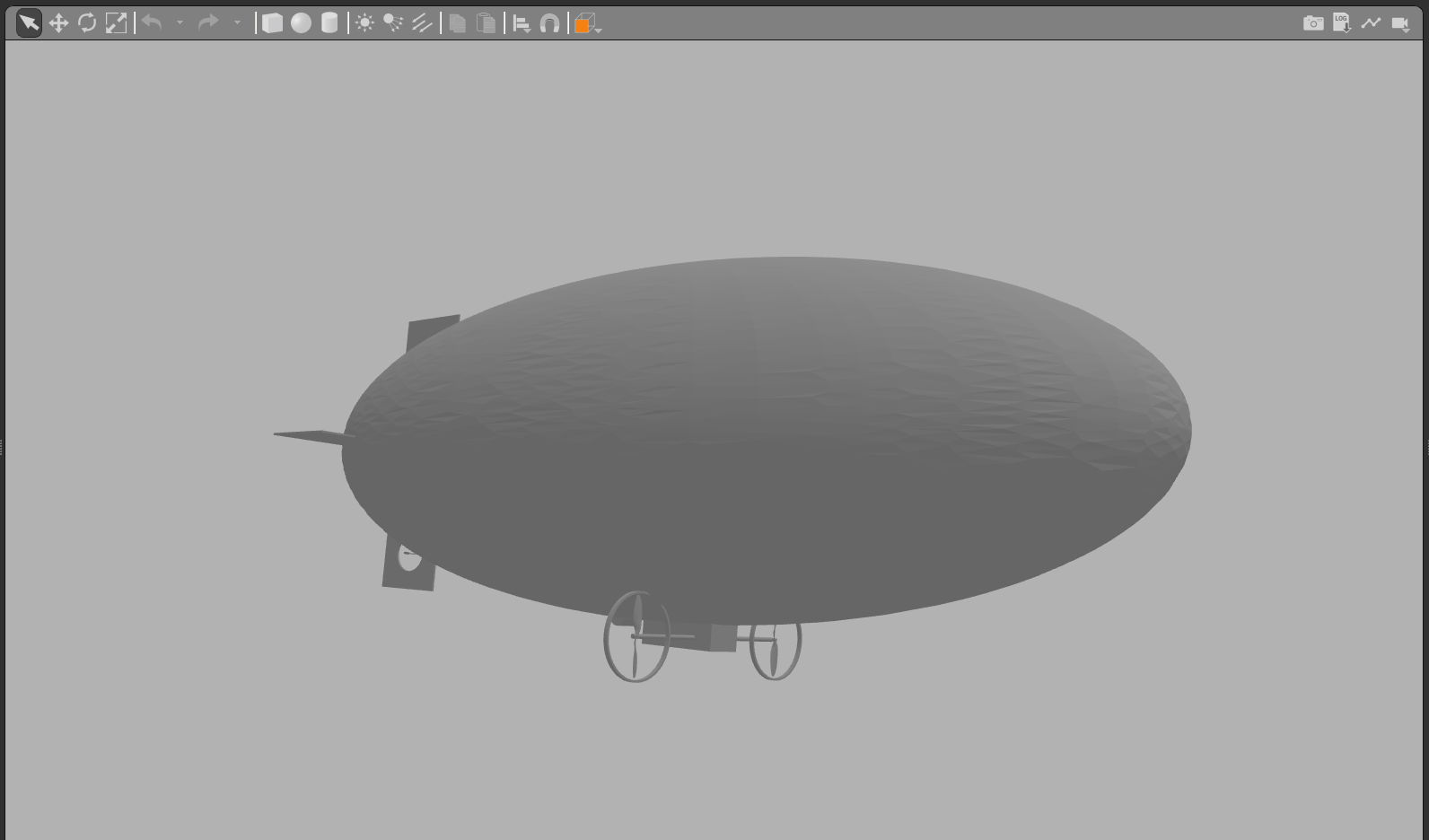
飞艇
云船
sh
make px4_sitl gazebo-classic_cloudship